



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
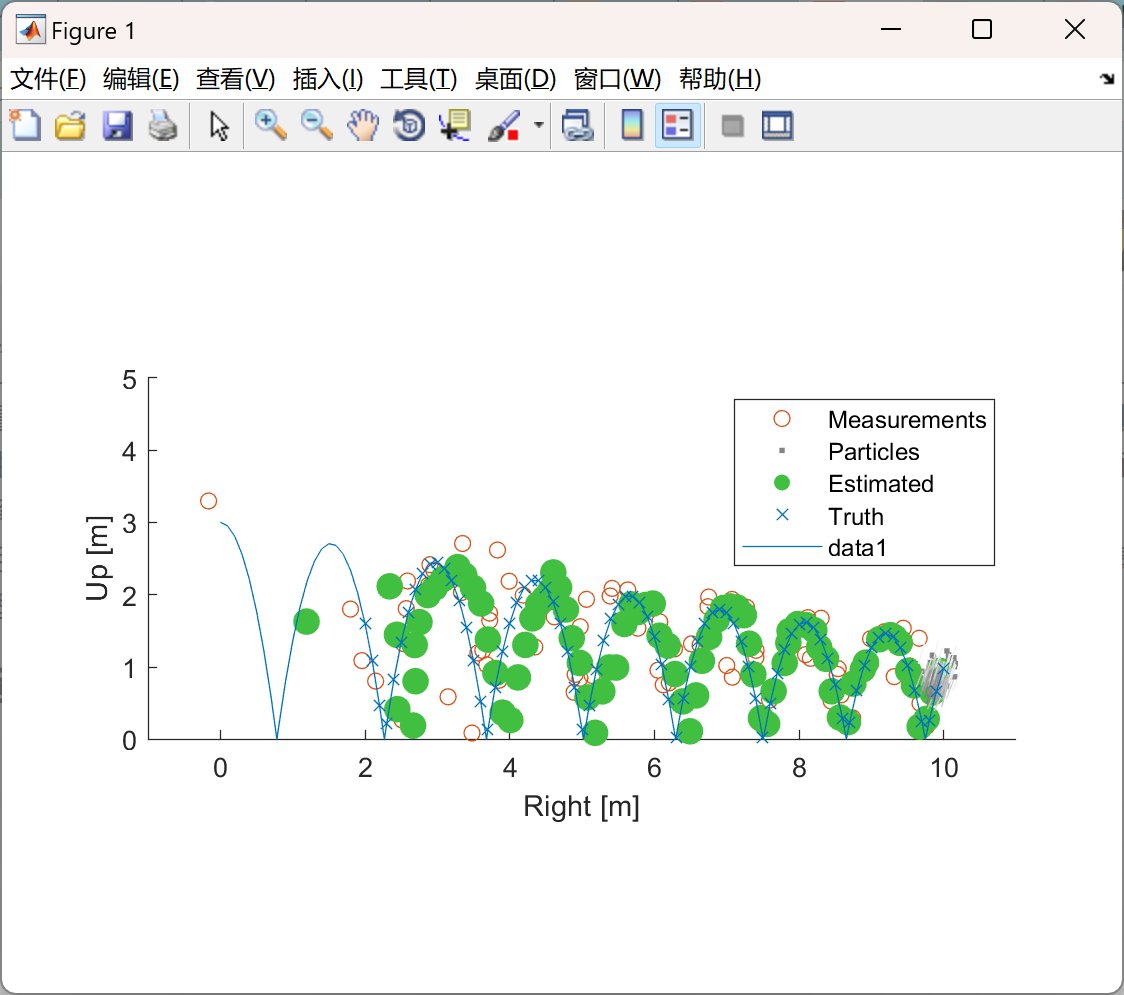
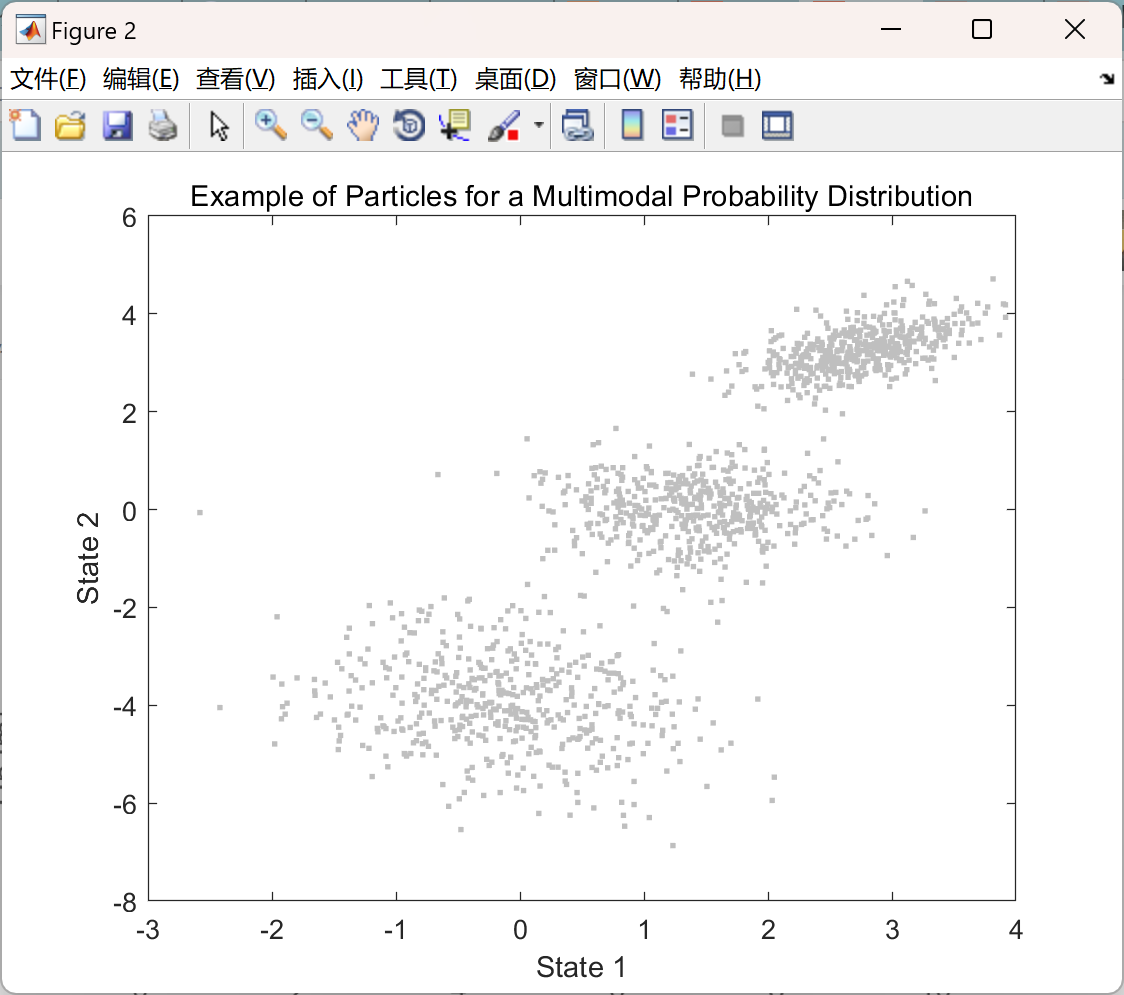
粒子滤波器工具包
粒子滤波器(Particle Filter,PF)是一种基于蒙特卡洛方法的滤波器,适用于处理非线性、非高斯系统的状态估计问题。粒子滤波器工具包通常包含以下主要功能和特点:原理基础:通过随机采样的粒子集合来近似系统状态的概率分布。每个粒子代表系统的一个可能状态,其权值反映了该状态出现的可能性。随着新的观测数据到来,粒子的权值会根据观测模型和状态转移模型进行更新,通过重采样等操作,去除权值低的粒子,保留权值高的粒子,从而实现对系统状态的动态估计。 功能模块:一般包括粒子初始化模块,用于根据先验知识生成初始粒子集合;状态预测模块,依据系统状态转移方程预测粒子的下一时刻状态;观测更新模块,根据观测数据计算粒子的权值;重采样模块,对粒子进行筛选和复制,以保持粒子的有效性和多样性。应用场景:广泛应用于目标跟踪、机器人定位与导航、生物医学信号处理等领域。例如在无人驾驶中,可用于车辆对周围环境中目标物体的位置和运动状态的实时跟踪。优势与挑战:优势在于对非线性、非高斯问题的处理能力强,理论上可以逼近任何复杂的概率分布。但缺点是计算量较大,当粒子数量不足时可能出现粒子退化现象,导致估计精度下降。
Sigma点滤波器工具包
Sigma点滤波器(Sigma Point Filter,SPF)是一类用于处理非线性系统滤波问题的方法,主要包括无味卡尔曼滤波器(Unscented Kalman Filter,UKF)等。其工具包具有以下特点: 原理基础:基于Sigma点采样策略,通过选择一组特定的Sigma点来近似系统状态的概率分布。这些Sigma点经过非线性系统的传播后,能够更准确地捕捉概率分布的特性,然后通过加权求和等方式计算状态的均值和协方差,实现对系统状态的估计。 功能模块:通常有Sigma点生成模块,负责根据系统状态的维度和协方差等信息生成合适的Sigma点;状态传播模块,将Sigma点代入非线性系统模型进行传播;估计更新模块,结合观测数据对状态估计进行更新,计算新的均值和协方差。 应用场景:在航空航天、惯性导航、卫星定位等领域有重要应用。比如在飞行器的姿态估计中,能够利用传感器数据准确地估计飞行器的姿态角等状态参数。 优势与挑战:相比扩展卡尔曼滤波器,对非线性系统的逼近效果更好,在一定程度上能够提高估计精度,且不需要计算复杂的雅克比矩阵。但计算量相对较大,对系统模型的依赖性较强,模型不准确时可能影响估计效果。
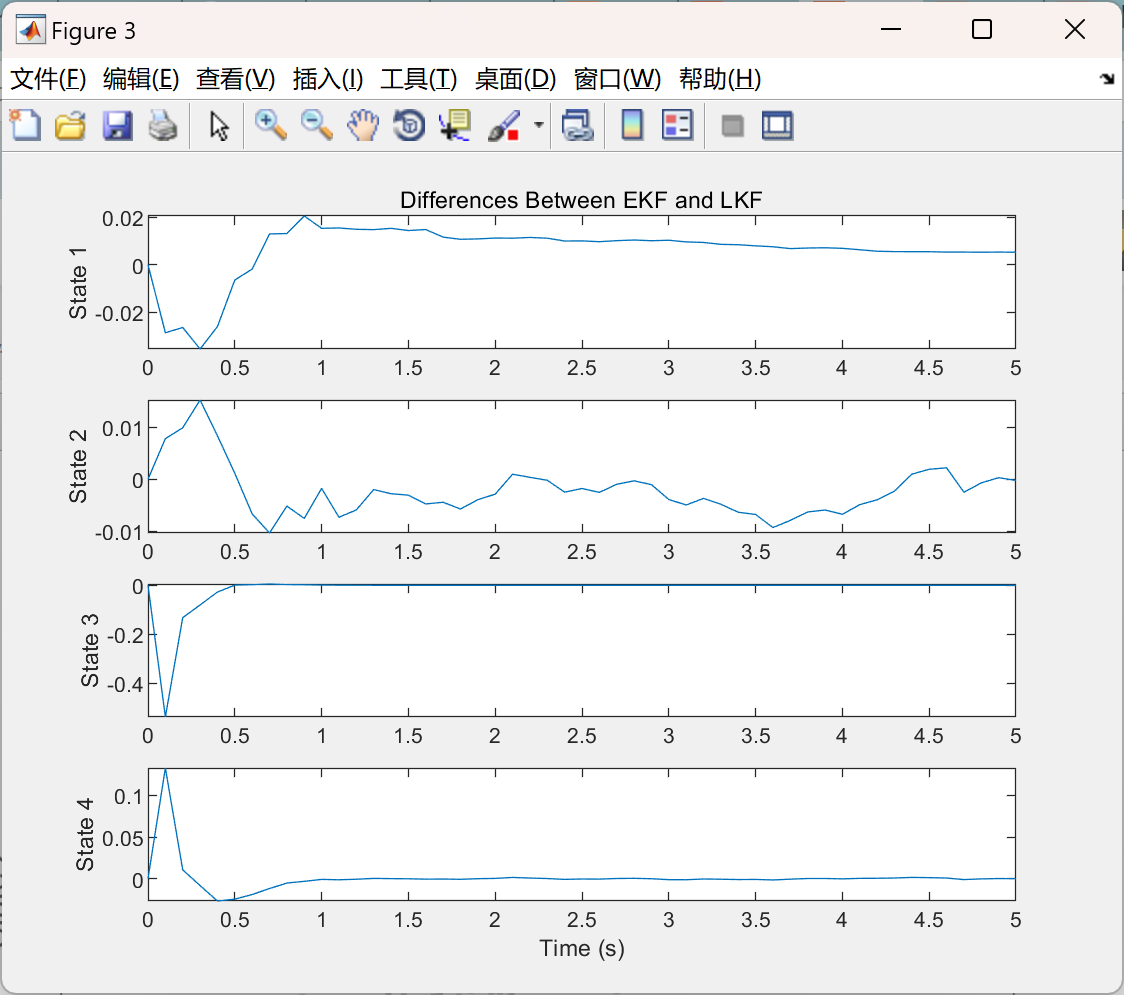
扩展线性卡尔曼滤波器工具包
扩展卡尔曼滤波器(Extended Kalman Filter,EKF)是卡尔曼滤波器在非线性系统中的扩展。其工具包有以下要点: 原理基础:通过对非线性系统进行线性化近似,将非线性问题转化为线性问题来处理。具体是利用泰勒级数展开,在当前状态估计值附近对非线性函数进行一阶线性化,然后基于线性卡尔曼滤波器的框架进行状态预测和更新。功能模块:包含线性化模块,用于对非线性的状态转移方程和观测方程进行线性化处理;状态预测模块和观测更新模块与标准卡尔曼滤波器类似,但在计算中考虑了线性化后的系数矩阵。应用场景:常用于机器人运动控制、电力系统状态估计、通信系统中的信号估计等领域。例如在机器人的路径规划中,可根据传感器测量数据估计机器人的位置和速度等状态,为路径规划提供依据。优势与挑战:实现相对简单,在一定程度上能够处理非线性问题,在许多实际应用中取得了较好的效果。然而,其性能依赖于线性化的精度,对于强非线性系统,线性化误差可能较大,导致估计不准确甚至滤波器发散。 这三种滤波器工具包在不同的应用场景下各有优劣,在实际使用中,需要根据具体的系统特性、精度要求、计算资源等因素选择合适的滤波器工具包,并对其进行适当的参数调整和优化,以实现最优的状态估计效果。
📚2 运行结果
部分函数代码:
rng(1);
% Initial true state, measurement noise covariance, and measurement
x0 = [0; 3; 1; 0];
R = 0.25^2 * eye(2);
z0 = x0(1:2) + covdraw(R);
% Initial state estimate and covariance. The initial particles will be
% centered on this initial estimate and distributed according to the
% covariance. The initial particle weights are all equal (1/N).
xh0 = [z0; 1; 0];
P0 = blkdiag(R, 2^2 * eye(2));
nX = 100;
X = bsxfun(@plus, covdraw(P0, nX), xh0);
w = 1/nX * ones(1, nX);
% Calculate the whole true trajectory.
[~, x, t] = propagate_ball(0, 10, x0);
% Create a function to calculate the colors for the particles according to
% their weights. This looks pretty good.
colors = @(w) 1 - max(0.95*w/max(w).^0.85, 0.05);
% Prepare the figure.
set(clf(figure(1)), 'Color', [1 1 1]);
colormap('gray');
axis equal;
axis([-1 11 0 5]);
caxis([0 1]);
xlabel('Right [m]');
ylabel('Up [m]');
hold on;
% Add the initial particles.
hX = scatter(X(1,:), X(2,:), [], colors(w), '.');
% Measurement
hz = plot(z0(1), z0(2), 'o', 'Color', [0.85 0.325 0.098]);
% Start the legend.
legend([hz hX], 'Measurement', 'Particles');
% colorbar();
%% Propagate the truth and draw the measurement.
% Manually propagate the truth and take a noisy measurement.
tk = 1;
xk = propagate_ball(0, tk, x0);
zk = xk(1:2) + covdraw(R);
set(hz, 'XData', [get(hz, 'XData'), zk(1)], ...
'YData', [get(hz, 'YData'), zk(2)]);
%% Propagate the particles, drawing their trajectories.
% Get trajectories for each ball.
xt = cell(1, nX);
Xn = zeros(size(X));
ht = zeros(1, nX);
line_colors = colors(w).' * [1 1 1];
for k = 1:nX
[Xn(:,k), xt{k}] = propagate_ball(0, 1, X(:,k));
ht(k) = plot(xt{k}(1,:), xt{k}(2,:), 'Color', line_colors(k,:));
end
set(hX, 'XData', Xn(1,:), 'YData', Xn(2,:), 'CData', colors(w));
uistack(hz, 'top');
%% Show distance to each particle.
hd = zeros(1, nX);
for k = 1:nX
hd(k) = plot([xt{k}(1,end) zk(1)], [xt{k}(2,end), zk(2)], ...
'Color', [0.85 0.325 0.098]);
end
%% Use the bootstrap filter to update the weights.
% Get rid of the error lines.
delete(hd);
% Create the propagation and observation functions.
f = @propagate_ball;
h = @(t, x, u) x(1:2);
% Create a function to make a random process noise draw. Since we don't use
% process noise for the bouncing ball, this is pretty easy:
d = @(varargin) [];
% Create a function to determine how likely a measurement error is. Since
% our measurement errors are Gaussian, we'll use the probability density
% function for a multivariate Gaussian distribution. (Note, since the
% "probabilities" of each particle are only important relative to each
% other, we can drop the constant scaling factor of the PDF.)
invR = inv(R);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]赵永熹,殷明洋,范宏,等.基于改进型多目标粒子群算法的光伏并网逆变器LCLLC滤波器参数优化方法[J].水电能源科学,2024,42(08):213-217+196.DOI:10.20040/j.cnki.1000-7709.2024.20231578.
[2]卢锦,马令坤,吕春玲,等.基于代价参考粒子滤波器组的多目标检测前跟踪算法[J].自动化学报,2024,50(04):851-861.DOI:10.16383/j.aas.c220635.
🌈4 Matlab代码实现


















 24
24

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









