



 本文探讨了在火星等极端环境下,通过使用不确定性量化和传播的方法,对行星探测器的traversability进行预测的轨迹规划策略。文章详细展示了MATLAB代码和数据分析,旨在提供一个在复杂地形中自主导航的解决方案。
本文探讨了在火星等极端环境下,通过使用不确定性量化和传播的方法,对行星探测器的traversability进行预测的轨迹规划策略。文章详细展示了MATLAB代码和数据分析,旨在提供一个在复杂地形中自主导航的解决方案。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
文献来源:
摘要:在极端环境中,如火星或火山地区,移动机器人已被用于科学任务,或作为未来载人任务的前导。这种名为a的机器人由航天合格、辐射硬化和低时钟的机载计算机管理,并自主地在具有挑战性的地形上行驶。
关键词:不确定性 预测模型 机器人 轨迹规划 轮子 反应动力
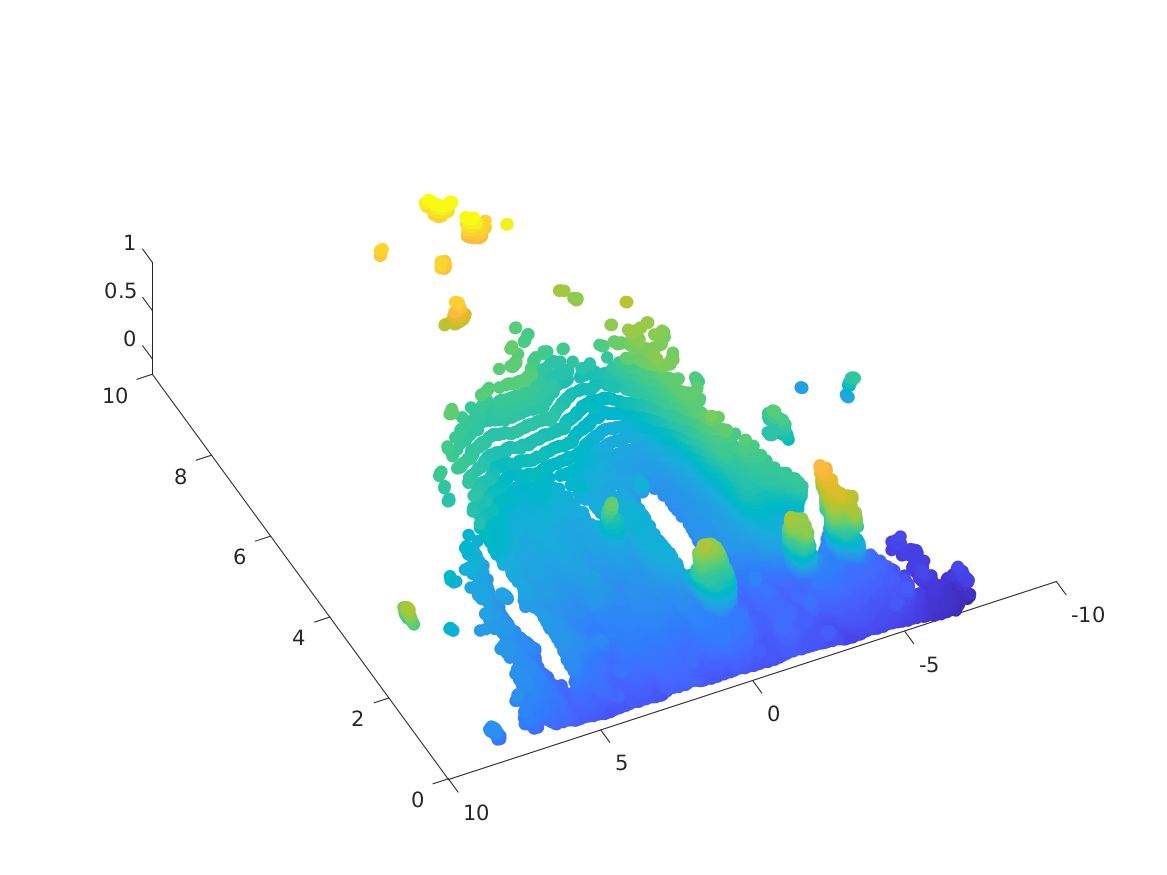
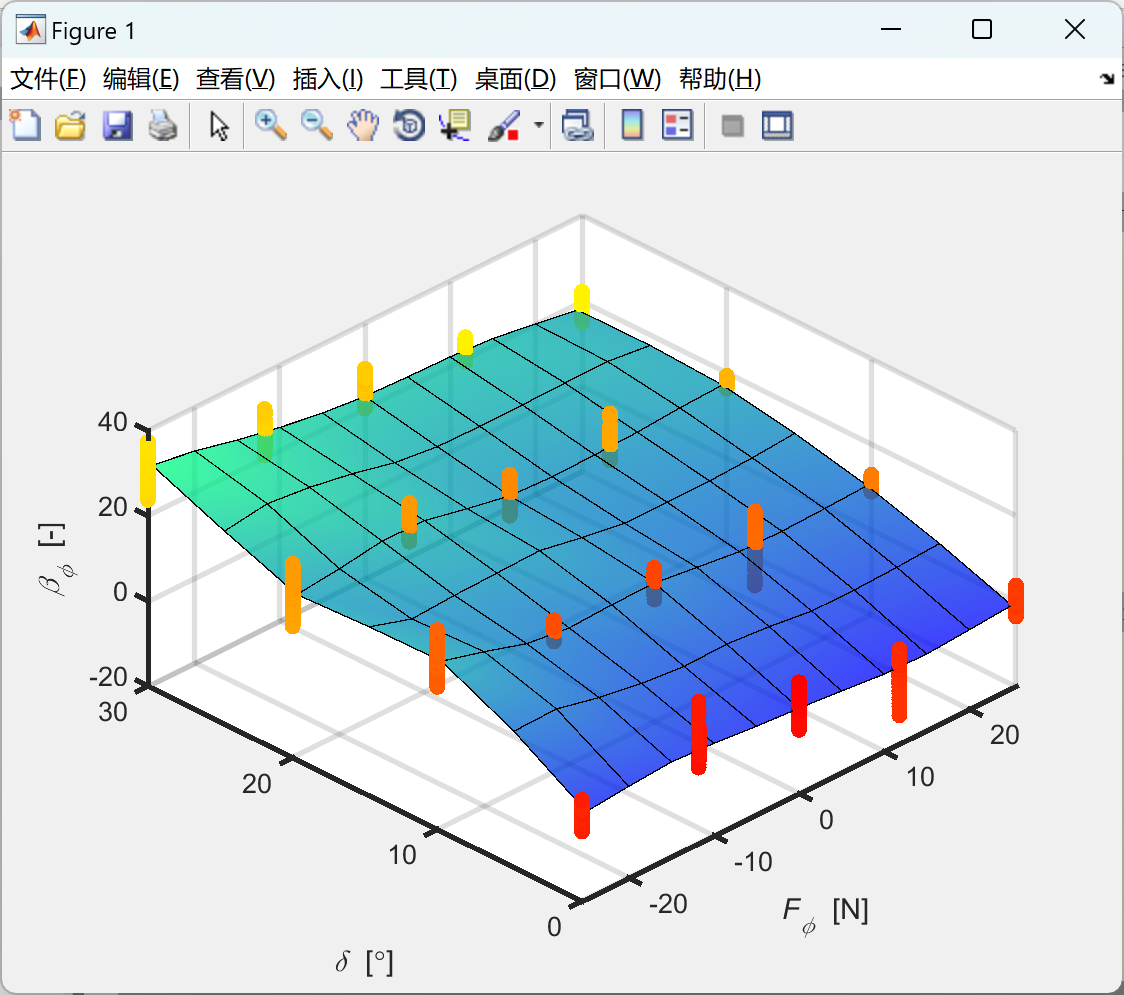
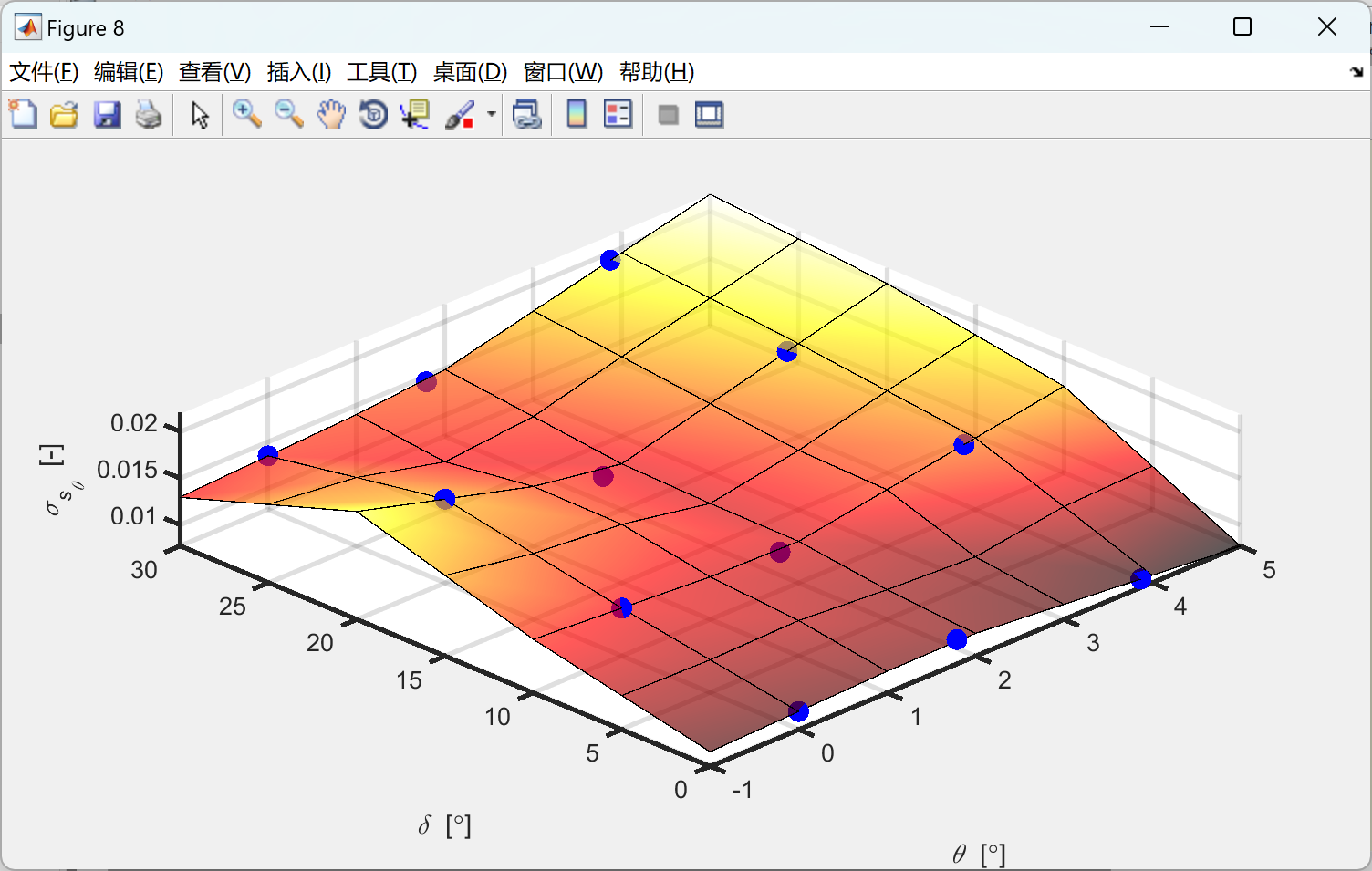
📚2 运行结果

部分代码:
% plot and interpolate
F_phi_range = -25:5:25;
F_theta_range = 0:5:25;
plot_slip_data(delta_phi, F_phi, s_phi, '\it F_\phi \rm [N]', '\it{s_\phi} \rm [-]', F_phi_range, 'Fphi_vs_s');
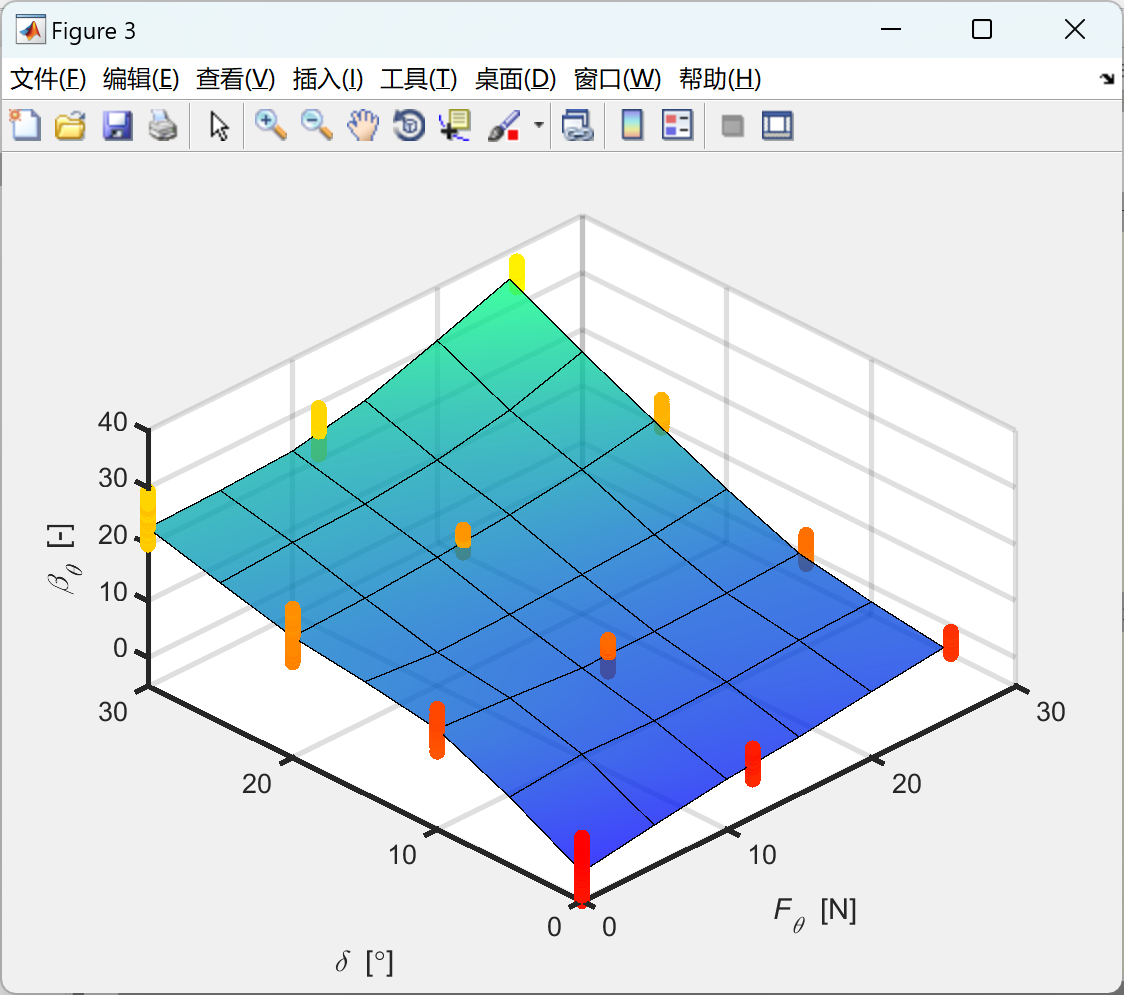
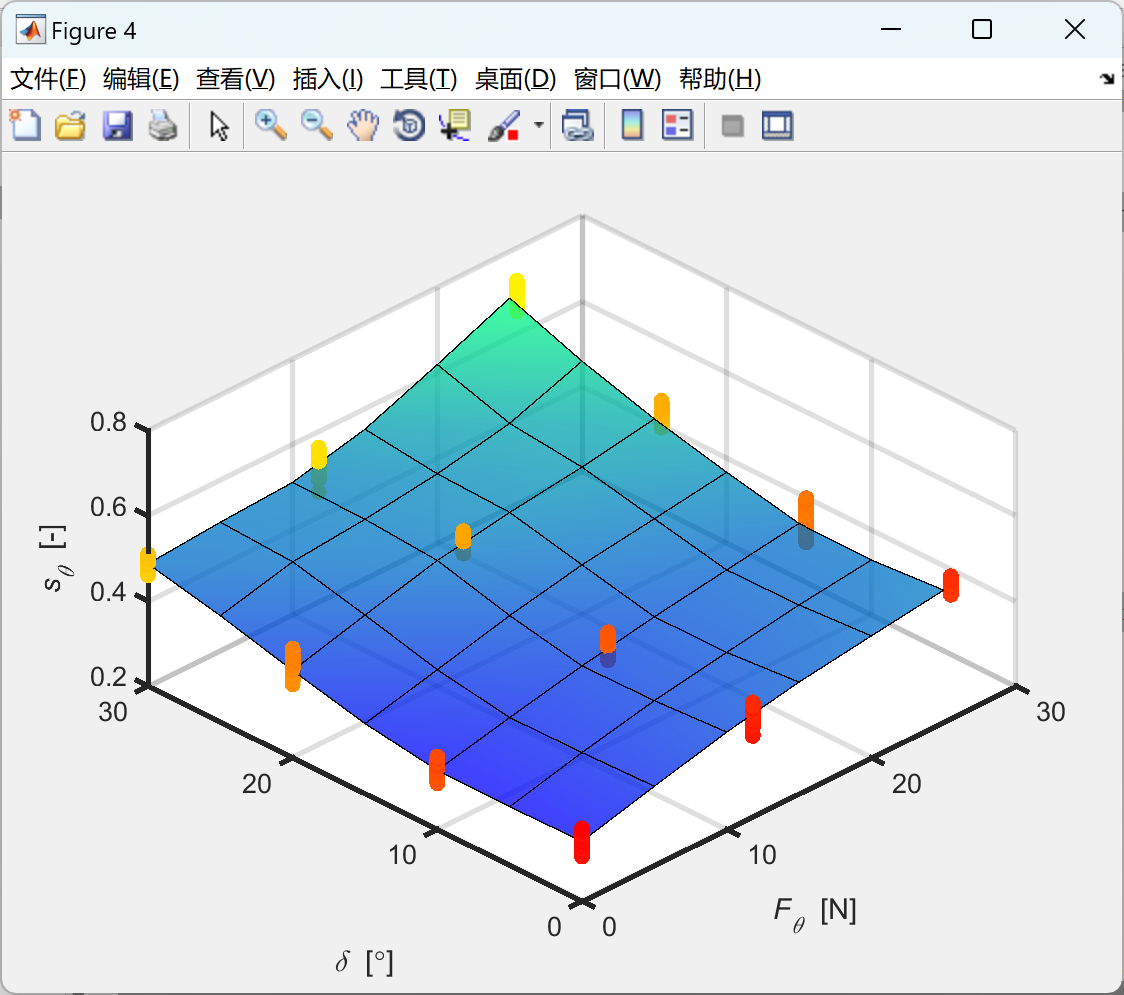
plot_slip_data(delta_theta, F_theta, s_theta, '\it F_\theta \rm [N]', '\it{s_\theta} \rm [-]', F_theta_range, 'Ftheta_vs_s');
plot_slip_data(delta_phi, F_phi, beta_phi, '\it F_\phi \rm [N]', '\it{\beta_\phi} \rm [-]', F_phi_range, 'Fphi_vs_beta');
plot_slip_data(delta_theta, F_theta, beta_theta, '\it F_\theta \rm [N]', '\it{\beta_\theta} \rm [-]', F_theta_range, 'Ftheta_vs_beta');
% sigma calculation
sigma_s_phi = [];
sigma_s_theta = [];
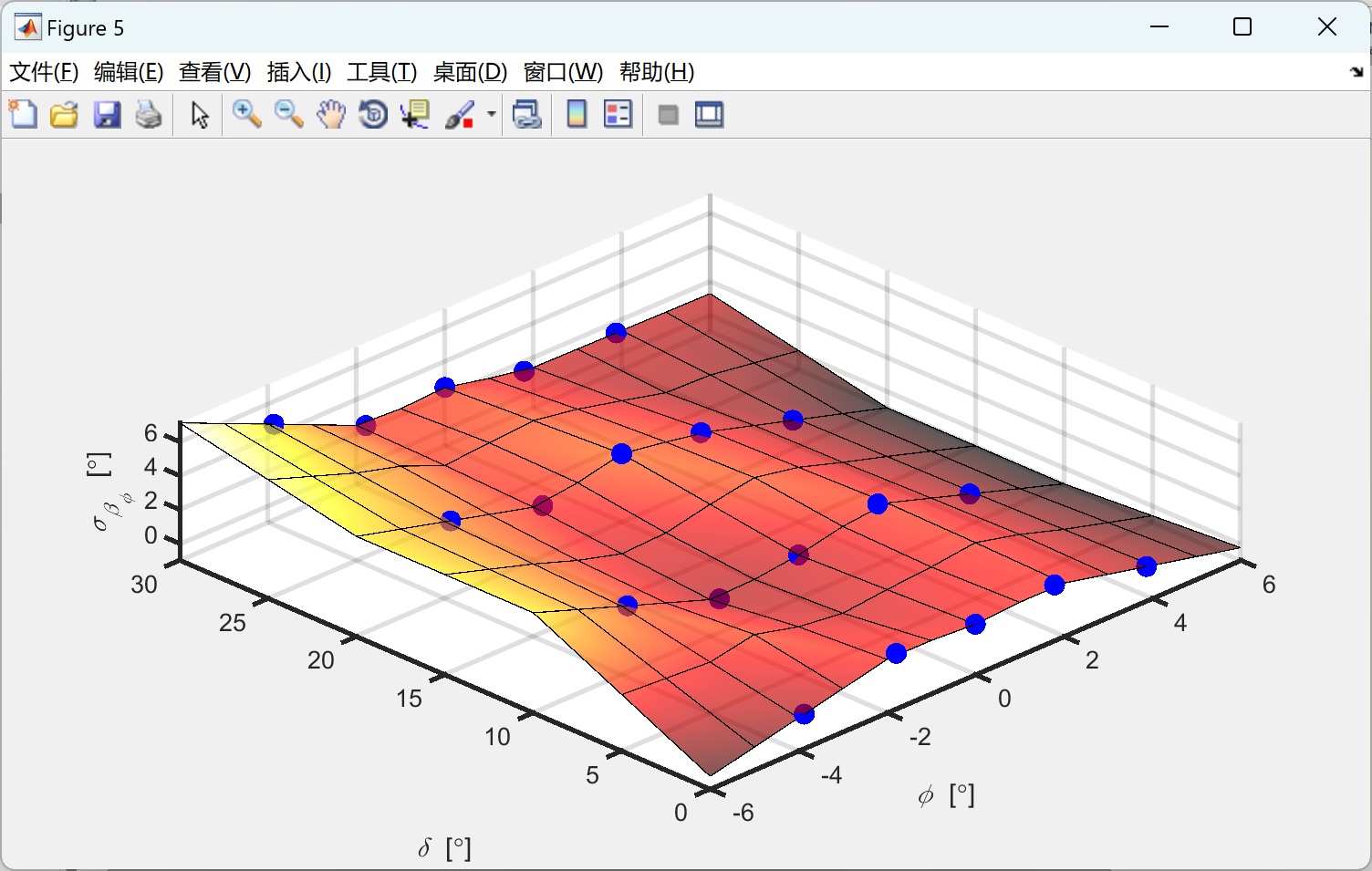
sigma_b_phi = [];
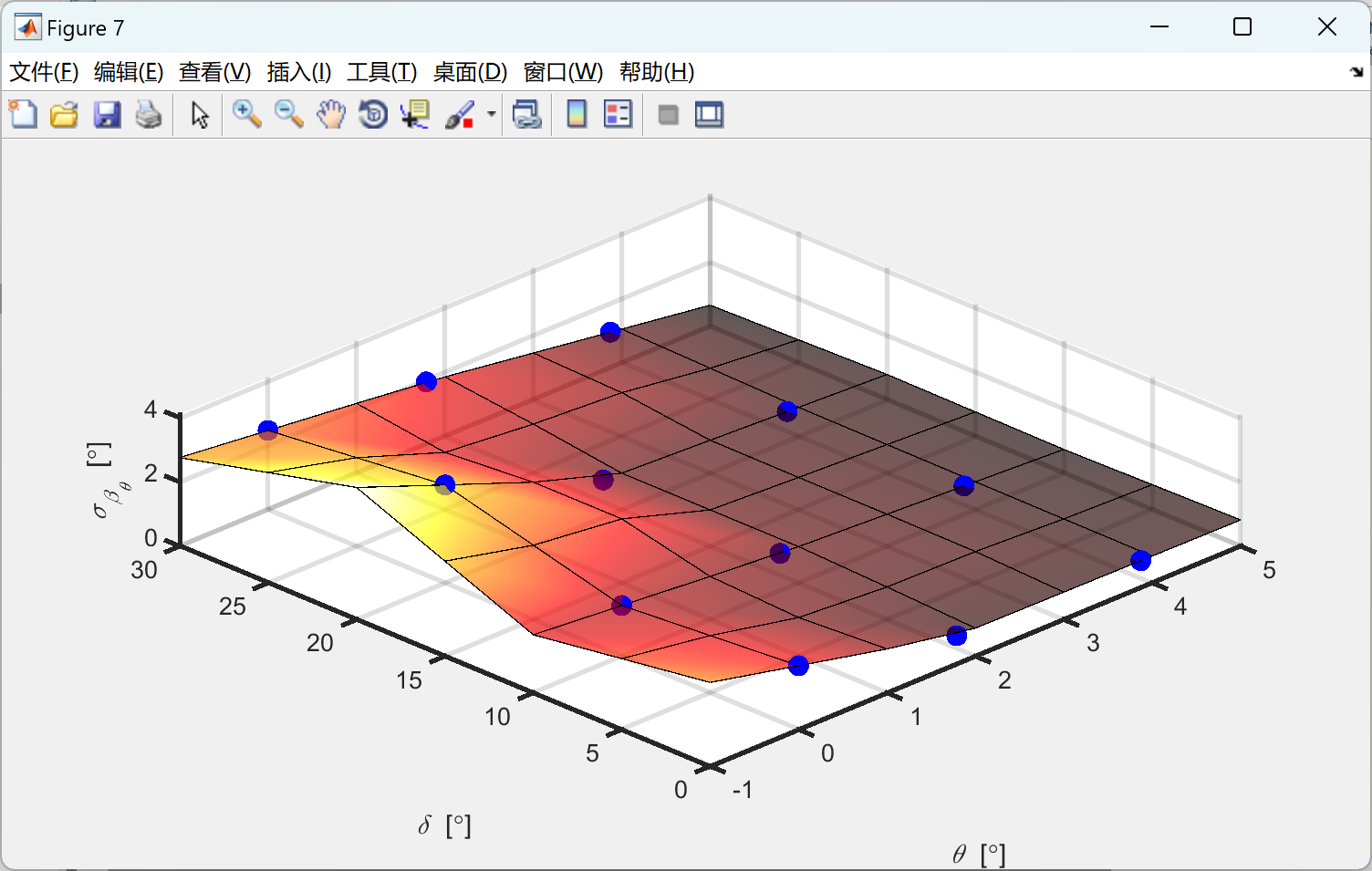
sigma_b_theta = [];
data_size = 500;
for i=1:1:size(F_phi, 2)/data_size
sigma_s_phi = horzcat(sigma_s_phi, std(s_phi(1+(i-1)*data_size:i*data_size)));
sigma_b_phi = horzcat(sigma_b_phi, std(beta_phi(1+(i-1)*data_size:i*data_size)));
end
for i=1:1:size(F_theta, 2)/data_size
sigma_s_theta = horzcat(sigma_s_theta, std(s_theta(1+(i-1)*data_size:i*data_size)));
sigma_b_theta = horzcat(sigma_b_theta, std(beta_theta(1+(i-1)*data_size:i*data_size)));
end
sigma_s_phi
sigma_b_phi
sigma_s_theta
sigma_b_theta
function plot_slip_data(data_x, data_y, data_z, label_y, label_z, F_range, fig_name)
delta_range = 0:5:30;
figure()
hold on;
S = scatter3(data_x, data_y, data_z,'filled');
C = autumn(numel(data_y));
S.CData = C;
hold on;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] Takemura R , Ishigami G .Uncertainty-Aware Trajectory Planning: Using Uncertainty Quantification and Propagation in Traversability Prediction of Planetary Rovers[J].IEEE Robotics & Automation Magazine, PP[2024-01-28].DOI:10.1109/MRA.2023.3341289.

















 716
716

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









