



 本文提出了一种结合扰动观测器和自适应动态面滑模控制的船舶轨迹跟踪策略,有效处理外部扰动,保证了船舶在动态环境中的稳定性和精度。通过Matlab和Simulink的仿真实现,验证了方法的有效性和鲁棒性。
本文提出了一种结合扰动观测器和自适应动态面滑模控制的船舶轨迹跟踪策略,有效处理外部扰动,保证了船舶在动态环境中的稳定性和精度。通过Matlab和Simulink的仿真实现,验证了方法的有效性和鲁棒性。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
针对遭受未知外部环境扰动的三自由度全驱动船舶轨迹跟踪控制问题,设计了一种高效的控制方法,该方法结合了带扰动观测器的自适应动态面滑模控制技术。通过构造扰动观测器,能够有效地估计未知扰动,并且利用自适应律来估计扰动观测误差的界,从而提高了控制系统的精度和稳定性。这种方法不仅能够应对各种未知扰动的干扰,还能够在动态环境下实现船舶轨迹跟踪控制,为船舶航行安全和稳定性提供了可靠的保障。因此,该方法具有很高的实用价值和广泛的应用前景,对船舶控制系统的研究和发展具有重要意义。
带扰动观测器的全驱动船舶轨迹跟踪自适应动态面滑模控制研究
摘要:船舶轨迹跟踪控制是船舶自主导航领域的重要研究课题,而动态面滑模控制是一种有效的控制方法。本文针对船舶轨迹跟踪控制问题,提出了一种带扰动观测器的全驱动船舶轨迹跟踪自适应动态面滑模控制方法。首先,建立了船舶的动力学模型,并考虑了外部扰动的影响。然后,设计了一个扰动观测器来估计和抵消外部扰动的影响。接着,利用自适应控制方法来调节控制参数,以适应船舶动力学模型的不确定性和外部环境的变化。最后,利用动态面滑模控制方法来实现船舶的轨迹跟踪控制。通过仿真实验验证了所提方法的有效性和鲁棒性。
关键词:船舶轨迹跟踪;动态面滑模控制;自适应控制;扰动观测器;全驱动船舶
Abstract: Ship trajectory tracking control is an important research topic in the field of autonomous navigation of ships, and dynamic surface sliding mode control is an effective control method. In this paper, a ship trajectory tracking adaptive dynamic surface sliding mode control method with disturbance observer for fully actuated ships is proposed. Firstly, the dynamic model of the ship is established, and the influence of external disturbances is considered. Then, a disturbance observer is designed to estimate and compensate for the influence of external disturbances. Next, an adaptive control method is used to adjust the control parameters to adapt to the uncertainty of the ship's dynamic model and the changes in the external environment. Finally, the dynamic surface sliding mode control method is used to achieve the trajectory tracking control of the ship. The effectiveness and robustness of the proposed method are verified through simulation experiments.
Keywords: ship trajectory tracking; dynamic surface sliding mode control; adaptive control; disturbance observer; fully actuated ship
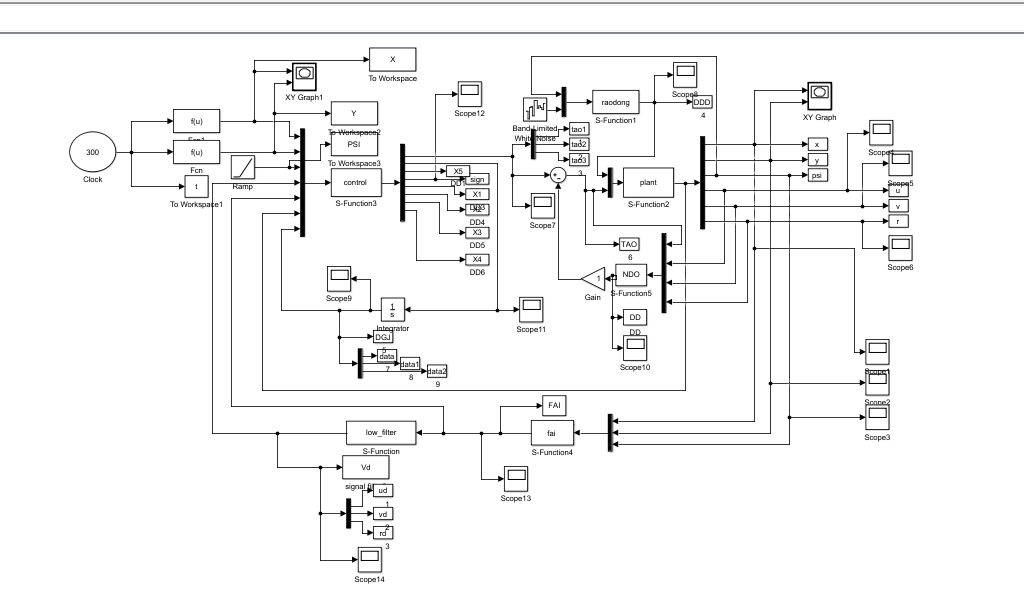
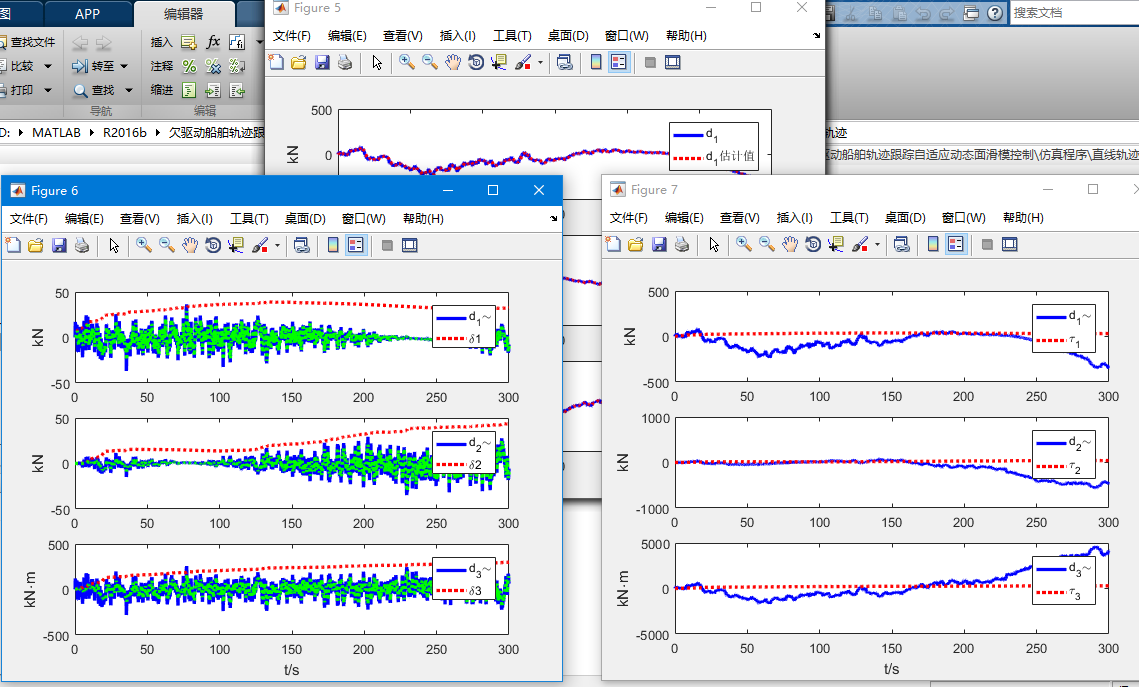
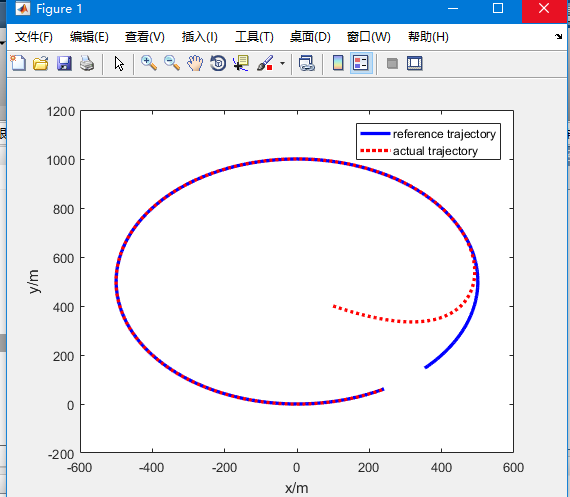
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]张晓玲,沈智鹏,毕艳楠.带扰动观测器的船舶轨迹跟踪自适应动态面滑模控制[J].船舶工程, 2018, 40(7):7.DOI:CNKI:SUN:CANB.0.2018-07-016.
[2]翟军勇,易善超.一种基于高阶滑模观测器的机械臂轨迹跟踪控制方法:CN201910245066.X[P].CN109927032A[2024-01-15].

















 2929
2929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









