



嵌入式crafter全网平台同名,喜欢视频版的可以移步dy、xhs、b站。
前言
因为最近公司产品需要用到无刷电机的无感控制,所以在网上查阅资料找到了STC公司开源的一个项目。所以在做产品和学习的过程中也将一些学到的知识进行输出一下。
本期视频先分析一下STC公司开源的原理图。
开源的链接如下,需要可以自取:

主控原理图
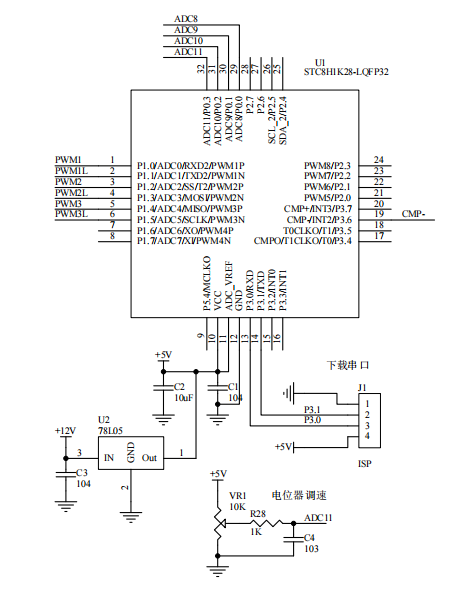
主控用到的是一个STC8H1K28芯片,28Kflash,256RAM,主控控制频率程序设置为24Mhz。供电外接12V通过一个LDO转成5V给单片机供电,12V给电机功率电路供电。
比较器模式下:ADC8~10作为电机反电动势的采样输入作为比较器的正极,CMP-引脚作为中点电压的采样输入作为比较器的负极。

PWM1~PWM3作为三组PWM互补输出对MOS管的上桥和下桥进行控制。
电机驱动原理图
先简单理解下NMOS和PMOS作为开关器件的导通条件。
- NMOS管当Vg-Vs>Vth时,DS之间导通。
- PMOS管当Vg-Vs
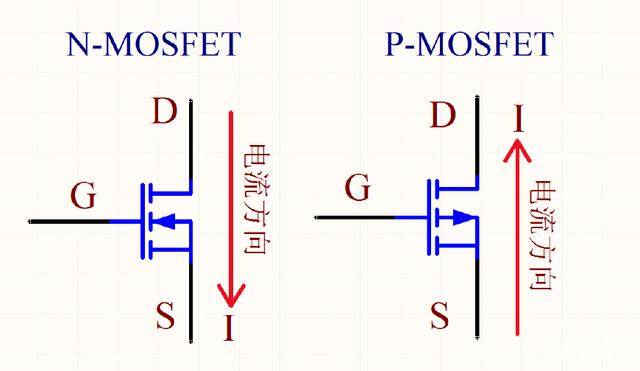
这里使用PMOS作为上管,NMOS作为下管的原因是,它们的S极都能连接到一个固定的电平。P管的S连接到12V,N管的S连接到地0V。
假设Vth = 2V。
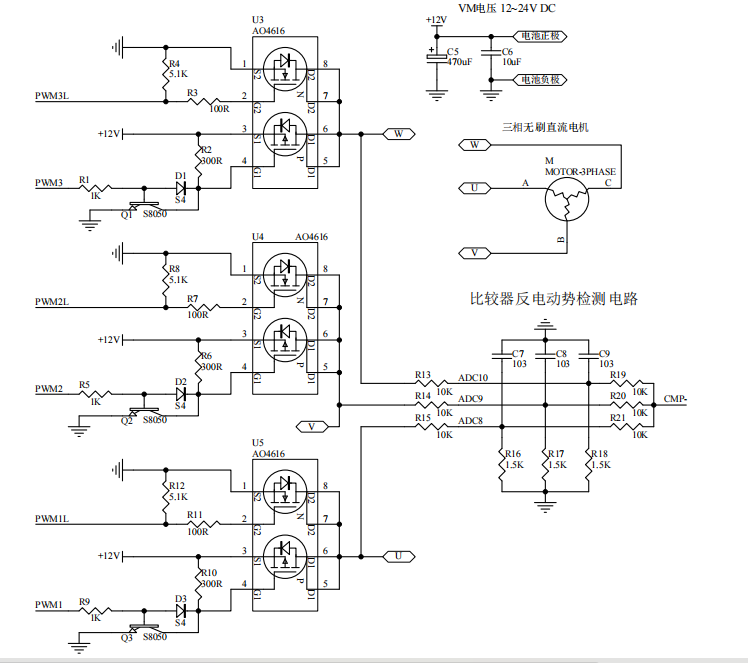
一般我们做电机控制时,为了避免上下两个开关管同时导通短路,我们会使用互补PWM。
互补 PWM 信号的高电平时间和低电平时间是互补的,即当一个 PWM 信号为高电平时,另一个为低电平,反之亦然。这样可以确保在任何时刻,只有一个开关管导通,电流通过负载正常流动。
W相输出高电平12V
- PWM3L引脚输出0V时,Vg=0V,Vs=0V,Vg-Vs=0V<2V,DS截止,
- PWM3引脚输出5V时,三极管导通,Vg拉到地=0V,Vs=12V,Vg-Vs=-12V<-2V,DS导通,W相输出12V。
W相输出低电平0V
- PWM3L引脚输出5V时,Vg=5V,Vs=0V,Vg-Vs=5V>2V,DS导通。W相输出0V
- PWM3引脚输出0V时,三极管Ib无电流,CE截止,Vg通过300R拉到12V,Vs=12V,Vg-Vs=0V>-2V,DS截止。
其他两相的原理都是一样的,这里就不再赘述了。
结尾
本期视频先讲了无感BLDC控制常见的原理图设计,后面的视频我会开始讲BLDC电机的控制原理和代码编写,希望各位小伙伴能给我个一键三连!!!


















 8111
8111

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









