







 本文介绍了在使用EVO进行精度评估时如何将GPS时间戳与ROS Bag包时间戳对齐,确保结果准确性。通过将GPS时间转换为与Bag包相同的参考系,并详细解释了转换过程,包括时间戳的计算和时区调整。同时,讨论了GPS和SLAM数据同步的重要性,以及在时间戳不一致情况下的对应方法。
本文介绍了在使用EVO进行精度评估时如何将GPS时间戳与ROS Bag包时间戳对齐,确保结果准确性。通过将GPS时间转换为与Bag包相同的参考系,并详细解释了转换过程,包括时间戳的计算和时区调整。同时,讨论了GPS和SLAM数据同步的重要性,以及在时间戳不一致情况下的对应方法。
在使用evo进行精度评估时,由于evo是通过时间戳来进行配准和比较的,为了使结果更准确,需要将GPS与bag包的时间戳进行转换对齐
在这里更方便的方法是转换GPS时间戳到bag包
首先查看GPS文件
他的时间如何转换呢
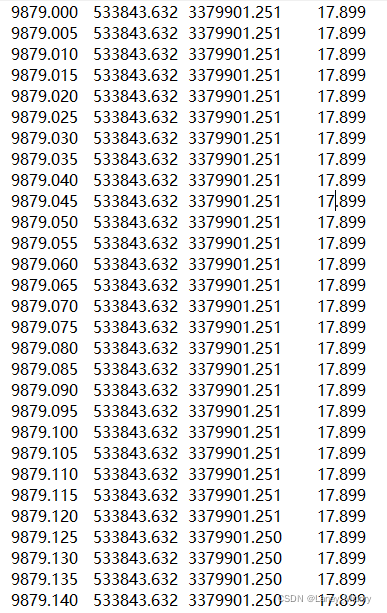
比如第一个时间9879
这个是相对于24:00的秒数,为了算他是现在的几点
首先9879除以3600算出小时,为2余2679,因此是2小时
再用2679除以60,为44余39
因此最后的结果为2小时44分钟39秒
由于我国是东八区,因此结果+8小时
因此GPS的时间是10时44分钟39秒
我们再来看一下bag包的时间
1642301444.100207 这个怎么办呢
首先通过bag信息查看bag文件的话题名
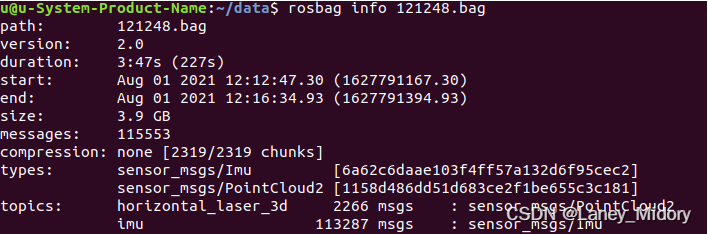
bag包的开始时间为12时12分47.30秒为1627791167.30
然后按照秒来加减即可
比如1627791394.93-1627791167.30=227.63
时间12时16分34.93秒-12时12分47.30秒=3分47.63为227.63因此这个时间为准确的
这就是时间戳对应的关系,但这样的话GPS和SLAM包开始时间必须相同或者间隔时间已知,否则无法对应



















 836
836

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











