




 本文介绍了机器人在自动化打磨设备中的应用,特别是在卫浴、汽车零部件等行业的高精度打磨作业。相比于人工,机器人打磨能提高生产效率、产品良率,但面临工件尺寸公差带来的挑战。盈连科技的柔性力控打磨系统通过实时侦测和重力补偿算法,确保打磨力恒定,弥补了机器人刚性不足的问题。机器人搭配力控打磨工具能提升打磨质量、生产率,改善劳动条件,降低操作技术要求,并具有可再开发性。
本文介绍了机器人在自动化打磨设备中的应用,特别是在卫浴、汽车零部件等行业的高精度打磨作业。相比于人工,机器人打磨能提高生产效率、产品良率,但面临工件尺寸公差带来的挑战。盈连科技的柔性力控打磨系统通过实时侦测和重力补偿算法,确保打磨力恒定,弥补了机器人刚性不足的问题。机器人搭配力控打磨工具能提升打磨质量、生产率,改善劳动条件,降低操作技术要求,并具有可再开发性。
现在机器人应用较为广泛,在自动化设备中,自动化打磨设备使用率也在提高和增加。

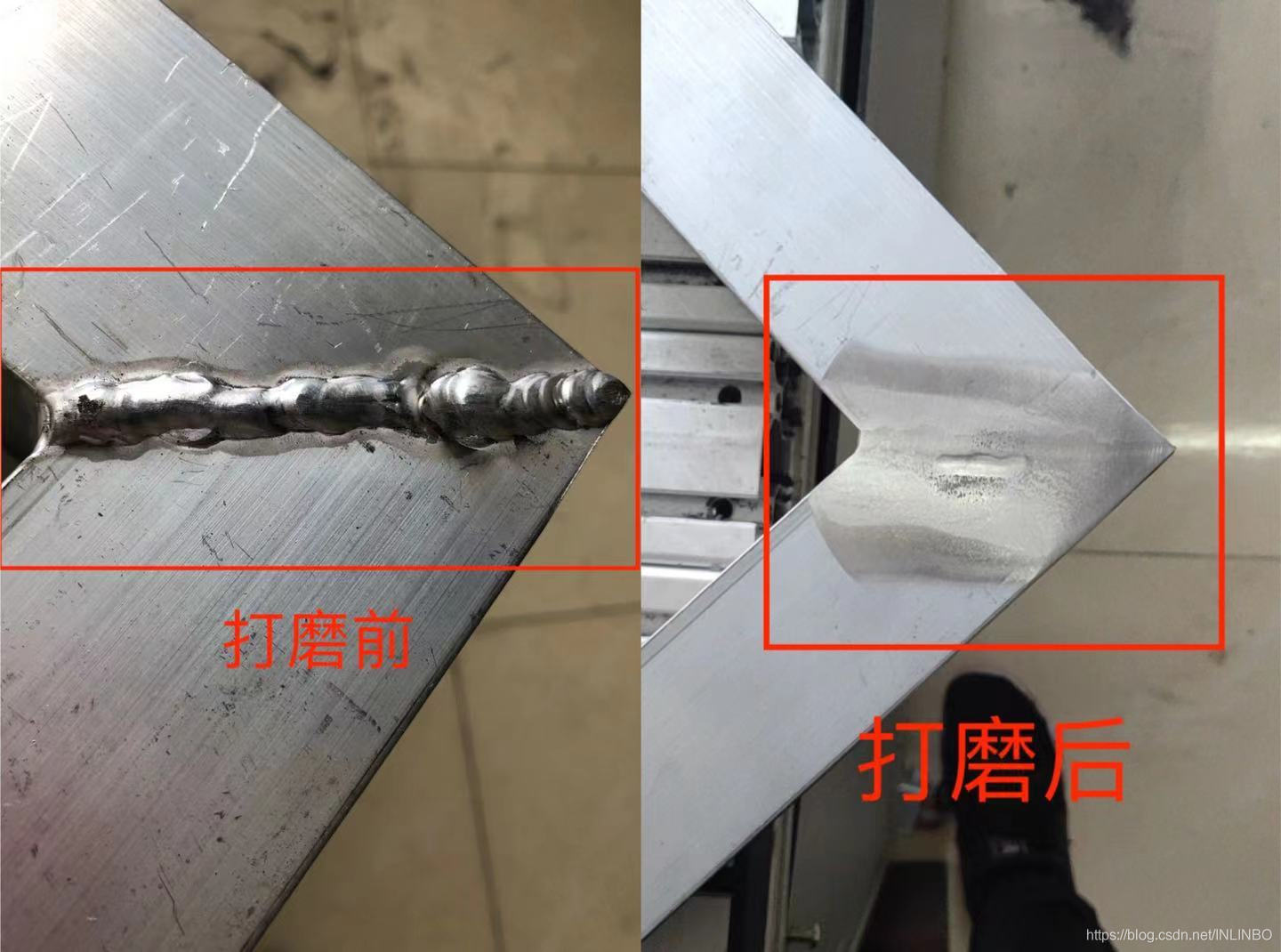
机器人打磨主要用于卫浴行业、行业、汽车零部件、工业零件、医疗器械、民用产品等行业高精度的打磨抛光作业。其打磨功能主要用于铸件表面打磨,棱角去毛刺,焊缝打磨,内腔内孔去毛刺,孔口螺纹口加工等。
与人工打磨比较,运用工业机器人则可根据编辑好的路径,实现高效而稳定的连续运行,帮助企业有效提高生产效率、产品良率,降低生产成本。而在工件材质复杂多样化的情况下,工件成型涉及工艺众多,涵盖了钣金、冲压、铸造、注塑、CNC等,因材质特性和成型方式的差异,工件多少都会存在尺寸公差,只是数据大小的差别而已。
由于工业机器人通常是按照调试好的路径精准运行,运行路径固定且误差极小,当工件表面尺寸出现略大的公差,或定位的位置略有偏差,打磨效果则会出现较大的波动,甚至会出现打磨不到、或者因压力过大而打磨过量的情况,导致良率过低,无法实现批量生产。
盈连科技柔性力控打磨系统通过内置传感器能实时侦测打磨压力、自身姿势、加速度等多种信息,并通过独有的重力补偿算法来确保任何姿势下,打磨设备与工件表面稳定接触,并保证打磨力的恒定。柔性力控打磨技术极大的弥补了国产机器人刚性不足及精度低的缺陷。高精度补偿且简单易用的操控,不仅提高打磨的工艺效果,还能确保了打磨的一致性。
机器人搭配力控打磨工具主要优点:
(1)提高打磨质量和产品光洁度,保证其一致性;
(2)提高生产率,一天可24小时连续生产;
(3)改善工人劳动条件,可在有害环境下长期工作;
(4)降低对工人操作技术的要求;
(5)缩短产品改型换代的周期,减少相应的投资设备;
(6)可再开发性,用户可根据不同样件进行二次编程。
总的来说, 很多铸件要人工打毛刺,不仅费时,打磨效果不好,效率低,而且操作者的手还常常受伤。打毛刺工作现场的空气染污和噪声会损害操作者的身心健康。而打磨机器人根据被加工零部件光洁度要求配置不同的打磨机和磨头。具有可长期进行打磨作业、保证产品的高生产率、高质量和高稳定性等特点。


















 2074
2074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









