






 在Ubuntu22.04的ROS2环境中,用户在使用colconbuild编译功能包并尝试运行时遇到了AttributeError:NoneTypeobjecthasnoattributegroup的问题。问题根源在于setup.py文件中,两个节点的路径设置缺少了分隔符,。修复此错误后,程序成功运行。
在Ubuntu22.04的ROS2环境中,用户在使用colconbuild编译功能包并尝试运行时遇到了AttributeError:NoneTypeobjecthasnoattributegroup的问题。问题根源在于setup.py文件中,两个节点的路径设置缺少了分隔符,。修复此错误后,程序成功运行。
Linux版本:Ubuntu 22.04
虚拟机上学习小鱼ros视频的ros2系统的话题与发布时遇到问题:
1.首先colcon build时没有问题,编译成功,然后source install/setup.bash时总会出现“ AttributeError: 'NoneType' object has no attribute 'group ”问题,代码及问题如下:
# 功能包名字village_li,想要运行包为li4
colcon build --packages-select village_li li4
解答:
后发现是在setup.py文件进行配置时,两个节点的路径设置忘记了加分隔符号“,”
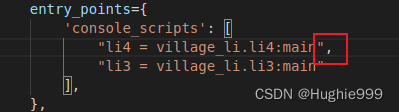
发现后添加“,”,程序成功运行:

如果本篇文章对你有帮助,解决了你的疑惑或者问题,请不要吝啬你的点赞哦,谢谢!

















 2545
2545

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









