




 本文概述了工业机器人轨迹规划的重要性,介绍了轨迹规划的基本概念、分类(基于空间和优化目标),包括直线、圆弧等基本轨迹和基于约束、智能算法的最优轨迹。特别强调了强化学习、误差补偿、动态避障及多机器人协作中的关键问题。
本文概述了工业机器人轨迹规划的重要性,介绍了轨迹规划的基本概念、分类(基于空间和优化目标),包括直线、圆弧等基本轨迹和基于约束、智能算法的最优轨迹。特别强调了强化学习、误差补偿、动态避障及多机器人协作中的关键问题。
原创 | 文 BFT机器人
01
轨迹规划简介
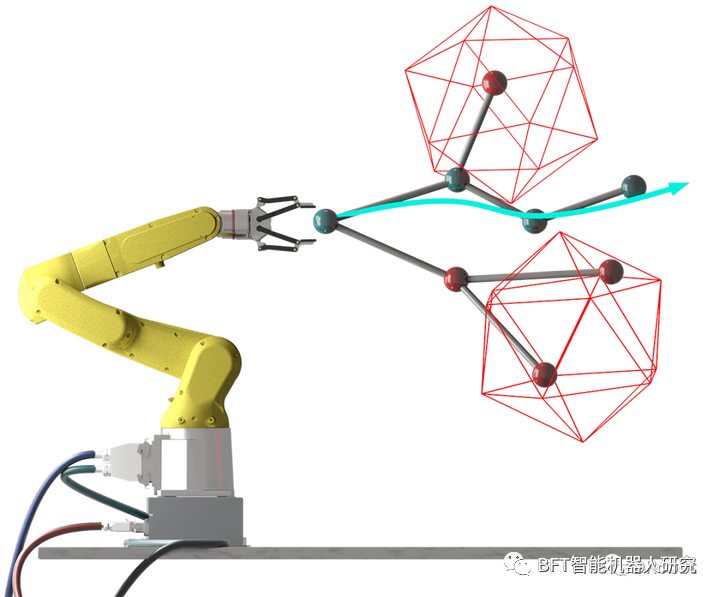
轨迹规划是工业机器人运动控制的基础,对工业机器人的工作效率和稳定性有重大影响。为掌握工业机器人轨迹规划方法的研究现状,根据工业机器人规划空间和优化目标的不同对轨迹规划方法进行分类,介绍了直线、圆弧等基本轨迹的优缺点和适用场合,分析了基于约束和智能算法的各种最优轨迹规划算法的思路和性能特点。指出了基于强化学习的轨迹规划、轨迹误差预测和补偿、动态避障、多机器人运动规划等是工业机器人轨迹规划的关键问题和重要研究方向。
轨迹规划是指根据作业任务的要求,计算出机器人预期的运动轨迹。轨迹规划一般表达为位移、 速度、加速度等运动变量关于时间的函数。在此函数中,输入是机器人的期望运动轨迹、运动学和动力学参数,输出是机器人各关节或末端执行器的运动变量。为满足实际工业生产要求,一个优秀的轨迹规划方法应当充分考虑机器人的关节磨损和运动平稳性,且在时间利用和能量消耗方面有良好的表现。
近年来,国内外学者针对不同工业场合提出了多种工业机器人的轨迹规划方法。为掌握工业机器人轨迹规划方法的研究现状,本文对各种轨迹规划方法进行了分类总结,分析了各种方法的规划思路及特点。在此基础上,指出工业机器人轨迹规划方法的关键技术问题和重点研究方向。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 840
840

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









