




 本文详细介绍了车辆运动学模型和动力学模型的构建过程,包括车辆转向运动模型、动力学约束、横摆角速度计算,以及基于小角度假设下的动力学模型简化。探讨了轮胎模型,特别是Pacejka的魔术公式在描述轮胎纵向力、侧向力和回正力矩方面的作用。
本文详细介绍了车辆运动学模型和动力学模型的构建过程,包括车辆转向运动模型、动力学约束、横摆角速度计算,以及基于小角度假设下的动力学模型简化。探讨了轮胎模型,特别是Pacejka的魔术公式在描述轮胎纵向力、侧向力和回正力矩方面的作用。
1. 车辆运动学模型:
车辆转向运动模型如图 2.1 2.1 2.1所示。
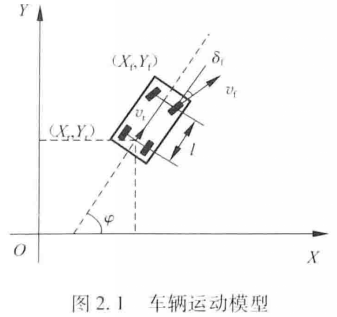
在惯性坐标系 O X Y OXY OXY下,
- ( X r , Y r ) \left(X_{r}, Y_{r}\right) (Xr,Yr)和 ( X f , Y f ) \left(X_{f}, Y_{f}\right) (Xf,Yf)分別为车辆后轴和前轴轴心的坐标;
- φ \varphi φ为车体的横摆角(航向角);
- δ f \delta_{\mathrm{f}} δf为前轮偏角;
- v r v_{\mathrm{r}} vr为车辆后轴中心速度;
- v f v_{\mathrm{f}} vf为车辆前轴中心速度;
- l l l为轴距(注意,变量下标 f f f代表
front—前, r r r代表rear—后,下同);
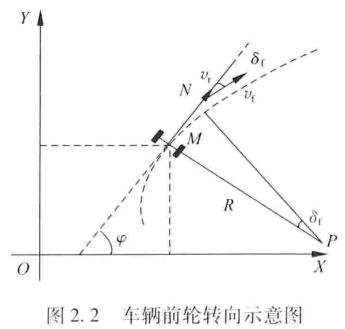
图2.2原图:
便于理解:
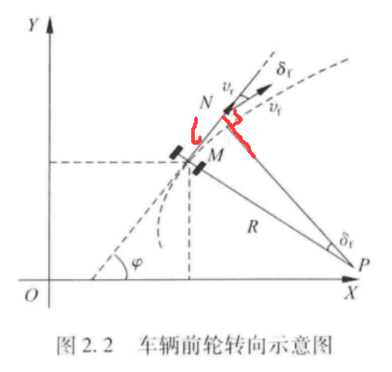
图2.2所示为车辆转向过程示意图, R R R为后轮转向半径, P P P为车辆的瞬时转动中心, M M M为车辆后轴轴心, N N N为前轴轴心。此处假设转向过程中车辆质心侧偏角保持不变,即车辆瞬时转向半径与道路曲率半径相同。
在后轴行驶轴心 ( X r , Y r ) \left(X_{r}, Y_{r}\right) (Xr,Yr)处,速度为:
v r = X ˙ r cos φ + Y ˙ r sin φ (1) v_{r}=\dot{X}_{r} \cos \varphi+\dot{Y}_{r} \sin \varphi\tag{1} vr=X˙rcosφ+Y˙rsinφ(1)
前后轴的运动学约束为:
{ X ˙ f sin ( φ + δ f ) − Y ˙ f cos ( φ + δ f ) = 0 X ˙ r sin φ − Y ˙ r cos φ = 0 (2) \left\{\begin{array}{l} \dot{X}_{f} \sin \left(\varphi+\delta_{f}\right)-\dot{Y}_{f} \cos \left(\varphi+\delta_{f}\right)=0 \\ \dot{X}_{r} \sin \varphi-\dot{Y}_{r} \cos \varphi=0 \end{array}\right.\tag{2} {
X˙fsin(φ+δf)−Y˙fcos(φ+δf)=0X˙rsinφ−Y˙rcosφ=0(2)
由式(1)和式(2)联合可得:
{ X ˙ r = v r cos φ Y ˙ r = v r sin φ (3) \left\{\begin{array}{l} \dot{X}_{r}=v_{r} \cos \varphi \\ \dot{Y}_{r}=v_{r} \sin \varphi \end{array}\right.\tag{3} {
X˙r=vrcosφY˙r=vrsinφ(3)
式3推导:将式1等式两边同时乘以 cos φ \cos \varphi cosφ,然后将式2代入可得式3
根据前后轮的几何关系可得:
{ X f = X r + l cos φ Y f = Y r + l sin φ (4) \left\{\begin{array}{l} X_{\mathrm{f}}=X_{r}+l \cos \varphi \\ Y_{\mathrm{f}}=Y_{r}+l \sin \varphi \end{array}\right.\tag{4} {
Xf=Xr+lcosφYf=Yr+lsinφ(4)
根据式2,式3和式4可得车辆横摆角速度 ω \omega ω为:
ω = v r l tan δ f (5) \omega=\frac{v_{r}}{l} \tan \delta_{f}\tag{5} ω=lvrtanδf(5)
式5推导:对式4左右求导:
X ˙ f = X ˙ r + l ( − sin φ ) ⋅ φ ˙ = V r cos φ + l ( − sin φ ) ⋅ φ ˙ Y ˙ f = Y ˙ r + l cos φ ⋅ φ ˙ = V r ⋅ sin φ + l cos φ ⋅ φ ˙ \begin{array}{l} \left.\dot{X}_{f}=\dot{X}_{r}+l (-\sin \varphi) \cdot \dot{\varphi}=V_{r} \cos \varphi+l (-\sin \varphi\right) \cdot \dot{\varphi} \\ \dot{Y}_{f}=\dot{Y}_{r}+l \operatorname{cos} \varphi \cdot \dot{\varphi}=V_{r} \cdot \sin \varphi+l {\cos \varphi} \cdot \dot{\varphi} \end{array} X˙f=X˙r+l(−sinφ)⋅φ˙=Vrcosφ+l(−sinφ)⋅φ˙Y˙f=Y˙r+lcosφ⋅φ˙=Vr⋅sinφ+lcosφ⋅φ˙
所以:
( V r cos φ − l sin φ ⋅ φ ˙ ) sin ( φ + δ f ) − ( V r ⋅ sin φ + l cos φ ⋅ φ ˙ ) ⋅ cos ( φ + δ f ) = 0 V r cos φ sin ( φ + δ f ) − V r sin φ ( cos φ + δ f ) − l sin φ ⋅ φ ˙ sin ( φ + δ f ) − l cos φ ⋅ φ ˙ cos ( φ + δ f ) = 0 \begin{aligned} &\left(V_{r} \cos \varphi-l \sin \varphi \cdot \dot{\varphi}\right) \sin \left(\varphi+\delta_{f}\right)-\left(V_{r} \cdot \sin \varphi+l\operatorname{ \cos} \varphi \cdot \dot{\varphi}\right) \cdot \cos (\varphi+\delta_{f})=0\\ &\begin{aligned} \left.V_{r} \cos \varphi \sin (\varphi+\delta_{f})-V_{r} \sin \varphi (\cos \varphi+\delta_{f}\right)-l \sin \varphi \cdot \dot{\varphi} \sin (\varphi+\delta_{f})-l \cos \varphi \cdot \dot{\varphi} \cos( \varphi+\delta_{f})=0 \end{aligned} \end{aligned} (Vrcosφ−lsinφ⋅φ˙)sin(φ+δf)−(Vr⋅sinφ+lcosφ⋅φ˙)⋅cos(φ+δf)=0Vrcosφsin(φ+δf)−Vrsinφ(cosφ+δf)−lsinφ⋅φ˙sin(φ+δf)−lcosφ⋅φ˙cos(φ+δf)=0
积化和差公式可得:
V r ⋅ sin δ f = l ⋅ φ ˙ ⋅ cos δ f V r ⋅ tan δ f = l ⋅ φ ˙ V x l ⋅ tan δ f = ω \begin{aligned} &V_{r} \cdot \sin \delta_{f}=l \cdot \dot{\varphi}\cdot{\cos \delta_{f}}\\ &V_{r} \cdot \tan \delta_{f}=l \cdot \dot{\varphi}\\ &\frac{V_{x}}{l} \cdot \tan \delta_{f}=\omega \end{aligned} Vr⋅sinδf=l⋅φ˙⋅cosδfVr⋅tanδf=l⋅φ˙lVx⋅tanδf=ω
同时由和车速可得到转向半径和前轮偏角:
{ R = v r / ω δ f = arctan ( l / R ) (6) \left\{\begin{array}{l} R=v_{\mathrm{r}} / \omega \\ \delta_{
{f}}=\arctan (l / R) \end{array}\right.\tag{6} {
R=vr/ωδf=arctan(l/R)(6)
由式(3)和式(5)可得到车辆运动学模型为:
[ X ˙ r Y ˙ r φ ˙ ] = [ cos φ sin φ tan δ f / l ] v r (7) \left[\begin{array}{c} \dot{X}_{\mathrm{r}} \\ \dot{Y}_{\mathrm{r}} \\ \dot{\varphi} \end{array}\right]=\left[\begin{array}{c} \cos \varphi \\ \sin \varphi \\ \tan \delta_{
{f}} / l \end{array}\right] v_{\mathrm{r}}\tag{7} ⎣⎡X˙rY˙rφ˙⎦⎤=⎣⎡cosφsinφtanδf/l⎦⎤vr(7
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5294
5294






 到【灌水乐园】发言
到【灌水乐园】发言







