



对目标位姿求无碰撞逆解的思路:根据VREP源码,rand()产生一组构型空间采样数组,正运动学计算末端位姿,求与目标位姿偏差,偏差小于阈值即可认为采样点运动学可达ikgoal ,进一步计算其碰撞检测结果,无碰撞则输出为逆解ikcollisionfreegoal, 有碰撞则继续随机采样。
问题,100000次采样,ikgoal较少,最终的ikcollisionfreegoal 无碰撞但图形显示有碰撞?
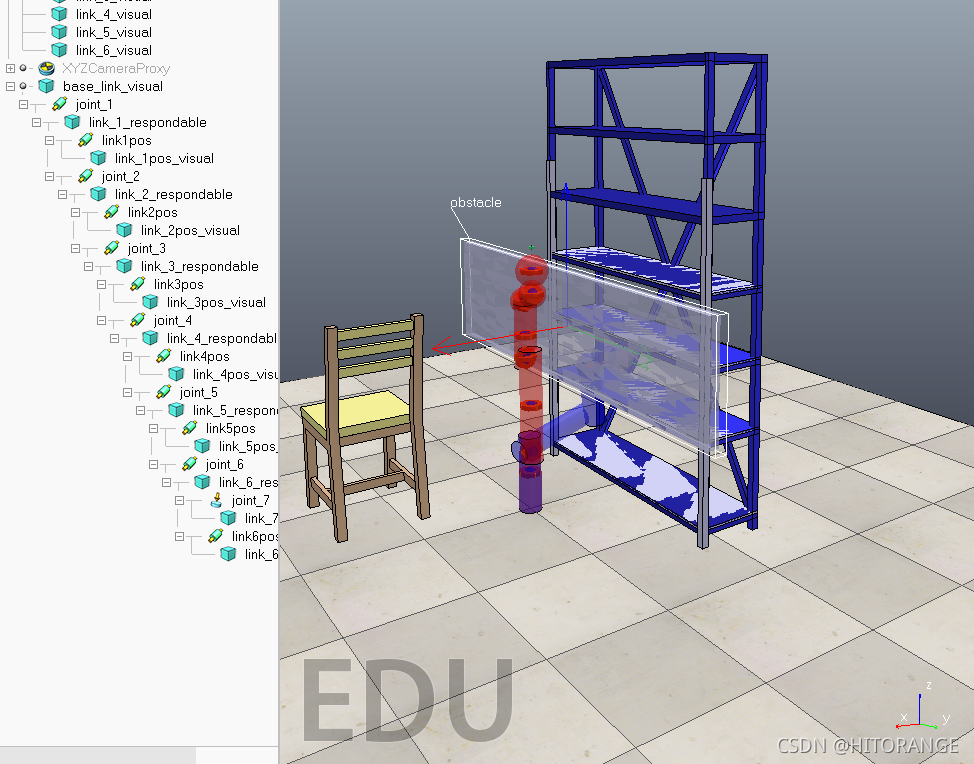
 该博客探讨了通过大量VREP采样计算,寻找末端位姿的无碰撞逆解过程。尽管ikgoal稀少,最终ikcollisionfreegoal显示碰撞,可能原因在于视觉显示误差或碰撞检测细节。
该博客探讨了通过大量VREP采样计算,寻找末端位姿的无碰撞逆解过程。尽管ikgoal稀少,最终ikcollisionfreegoal显示碰撞,可能原因在于视觉显示误差或碰撞检测细节。
对目标位姿求无碰撞逆解的思路:根据VREP源码,rand()产生一组构型空间采样数组,正运动学计算末端位姿,求与目标位姿偏差,偏差小于阈值即可认为采样点运动学可达ikgoal ,进一步计算其碰撞检测结果,无碰撞则输出为逆解ikcollisionfreegoal, 有碰撞则继续随机采样。
问题,100000次采样,ikgoal较少,最终的ikcollisionfreegoal 无碰撞但图形显示有碰撞?
 181
181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























