





大家好,欢迎阅读这份《智能体(AI+Agent)开发指南》!
在大模型和智能体快速发展的今天,很多朋友希望学习如何从零开始搭建一个属于自己的智能体。本教程的特点是 完全基于国产大模型与火山推理引擎实现,不用翻墙即可上手,非常适合国内开发者快速实践。
通过循序渐进的讲解,你将学会从 环境配置、基础构建、进阶功能到实际案例 的完整流程,逐步掌握智能体开发的核心技能。无论你是初学者还是有经验的工程师,相信这份教程都能为你带来启发。
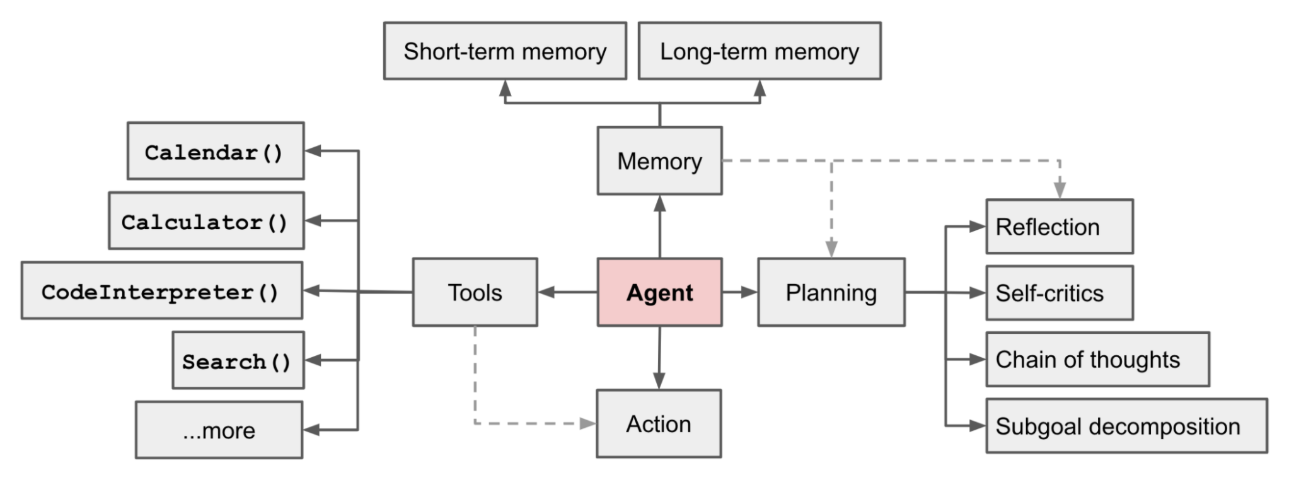
目前4 种主要的 Agent 设计模式,分别是:
• Reflection:让 Agent 审视和修正自己生成的输出;
• Tool Use:LLM 生成代码、调用 API 等进行实际操作;
• Planning:让 Agent 分解复杂任务并按计划执行;
• Multiagent Collaboration:多个 Agent 扮演不同角色合作完成任务。
一. 任务分解
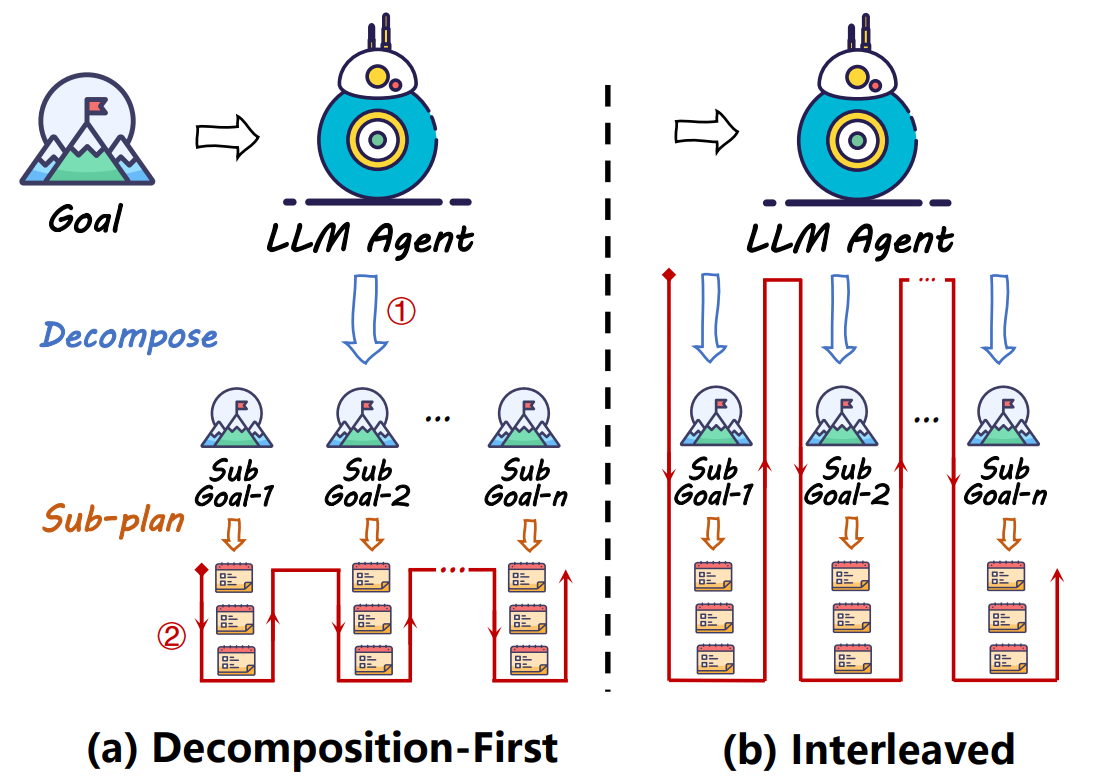
现实生活中的任务通常很复杂且步骤很多,给规划带来了严重的困难。这种方法采用分而治之的思想,将复杂的任务分解为几个子任务,然后依次对每个子任务进行规划。
◦ 两个关键步骤:首先,分解复杂任务,称为“分解”步骤;其次,规划子任务,称为“子规划”步骤。
◦ 分解优先:首先将任务分解为子目标,然后依次规划每个子目标,其核心在于“先分解,后执行”。
◦ 交叉分解:任务分解和子任务规划交叉进行,其中每个分解仅显示当前状态下的一个或两个子任务。
二. 多计划选择 Multi-plan Selection
这种方法侧重于引导LLM更多地“思考”,为一项任务生成各种备选计划。然后采用与任务相关的搜索算法(例如ToT使用BFS和DFS)来选择一个计划来执行。
◦ 两个主要步骤:多计划生成和最优计划选择
◦ 多计划生成:主流方法考虑在生成模型的解码过程中使用不确定性。
三. 外部模块辅助规划 External Module-aided Planning
这种方法采用外部规划器来提升规划程序,旨在解决生成的计划的效率和可行性问题,而 LLM 主要在形式化任务方面发挥作用。
◦ **符号规划器**:几十年来,符号规划器一直是自动规划领域的基本组成部分。这些方法基于成熟的符号形式化模型,例如 PDDL 模型,采用符号推理来识别从初始状态到期望目标状态的最佳路径。
◦ **神经规划器**:神经规划器是使用强化学习或模仿学习技术对收集的规划数据进行训练的深度模型,在特定领域内表现出有效的规划能力。
四. 反思和精炼 Reflection & Refinement
这种方法强调通过反思和细化来提高规划能力,鼓励 LLM 反思失败,然后完善计划,reflect-refine-reflect-refine……
反思和精炼的最佳方案是和其他方法相结合,例如Reflexion通过合并评估器来评估轨迹,扩展了 ReAct。LLM 在检测到错误后会生成自我反思,帮助纠正错误。
五. 记忆增强型规划 Memory-aided Planning
这种方法通过额外的记忆模块增强了规划,其中存储了有价值的信息,例如常识知识、过去的经验、特定领域的知识等。规划时会检索这些信息,作为辅助信号。例如:RAG。
欢迎关注微信公众号:AIWorkshopLab,自动获取完整教程:智能体(AI+Agent)开发指南.pdf。



















 1509
1509

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











