



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
鲁棒卡尔曼滤波在跟踪噪声测量中采样的维纳过程的任务研究
该任务的核心在于将鲁棒卡尔曼滤波这一先进的技术手段应用到跟踪在噪声测量环境下进行采样的维纳过程当中。维纳过程是一种具有随机特性的数学模型,在许多实际场景中都有所体现。而噪声测量则往往会给对其的准确跟踪带来诸多挑战和干扰。 通过应用鲁棒卡尔曼滤波,能够有效地处理测量数据中所包含的不确定性以及复杂多变的噪声。其作用不仅仅是简单的数据处理,更在于凭借其独特的算法和模型,从充满噪声和不确定性的测量数据中提取出有价值的信息,从而对维纳过程进行更为精确和可靠的跟踪。 这一应用在众多领域都具有极其重要的意义。比如在通信工程中,能够优化信号的传输和接收;在自动控制领域,有助于提升系统的稳定性和准确性;在金融领域,可以对市场的波动和风险进行更精准的预测和评估。总之,将鲁棒卡尔曼滤波应用于跟踪噪声测量中采样的维纳过程,为解决实际问题提供了有力的工具和方法,具有广泛的应用前景和巨大的潜在价值。
摘要
本文研究了鲁棒卡尔曼滤波在跟踪噪声测量中采样的维纳过程的应用。维纳过程作为一种重要的随机过程,在信号处理、金融数学等领域具有广泛应用。然而,在实际应用中,测量噪声往往会对维纳过程的跟踪产生显著影响。鲁棒卡尔曼滤波作为一种改进的卡尔曼滤波算法,能够在存在不确定性和噪声的环境下保持稳定性,为维纳过程的跟踪提供了一种行之有效的解决方案。本文通过理论分析和仿真实验,验证了鲁棒卡尔曼滤波在跟踪噪声测量中采样的维纳过程中的有效性和优越性。
1. 引言
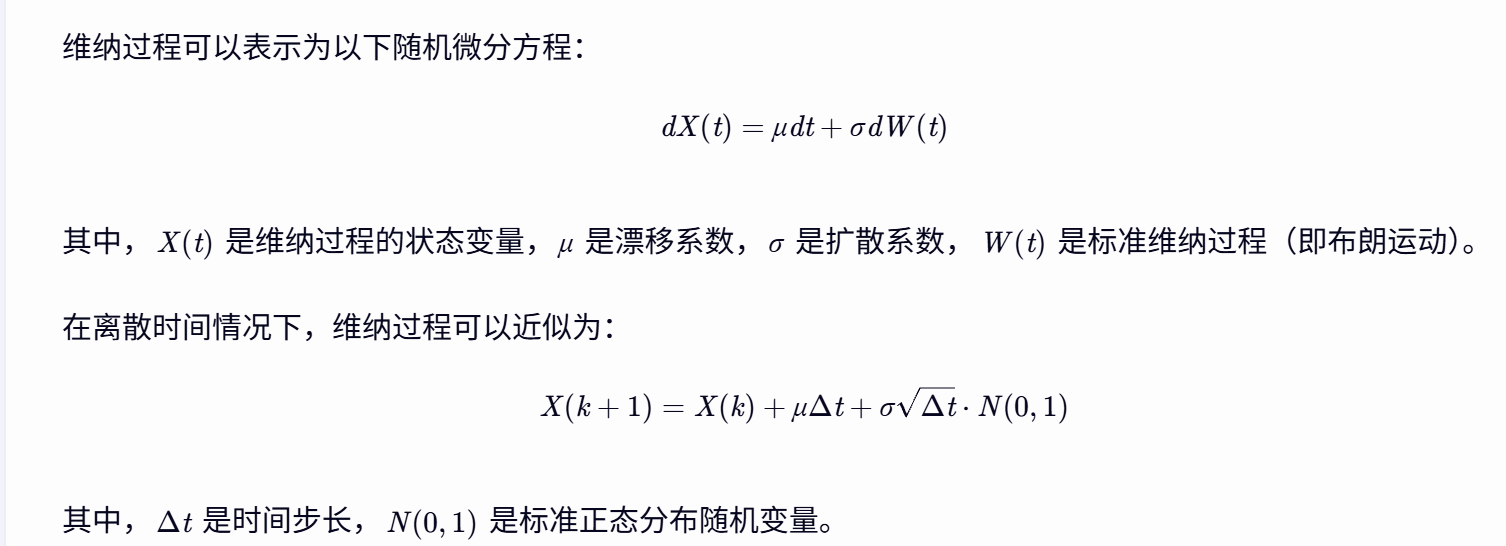
维纳过程(Wiener Process)是一种连续时间随机过程,具有独立的增量和正态分布的特性,广泛应用于随机信号处理、金融数学等领域。在噪声测量的背景下,对维纳过程进行模拟和分析变得至关重要。然而,测量噪声往往会对维纳过程的跟踪产生显著影响,导致估计结果不准确。因此,如何在存在噪声的情况下准确跟踪维纳过程成为了一个亟待解决的问题。
卡尔曼滤波作为一种高效的自回归滤波器,能够在存在诸多不确定性情况的组合信息中估计动态系统的状态。然而,经典卡尔曼滤波对模型参数和噪声统计特性的准确性要求较高,当模型参数和噪声统计特性存在不确定性时,滤波性能会降低甚至发散。为了克服这一问题,鲁棒卡尔曼滤波应运而生。鲁棒卡尔曼滤波能够在存在不确定性和噪声的环境下保持稳定性,为动态系统的状态估计提供了一种更为可靠的方法。
2. 鲁棒卡尔曼滤波原理
2.1 卡尔曼滤波基础
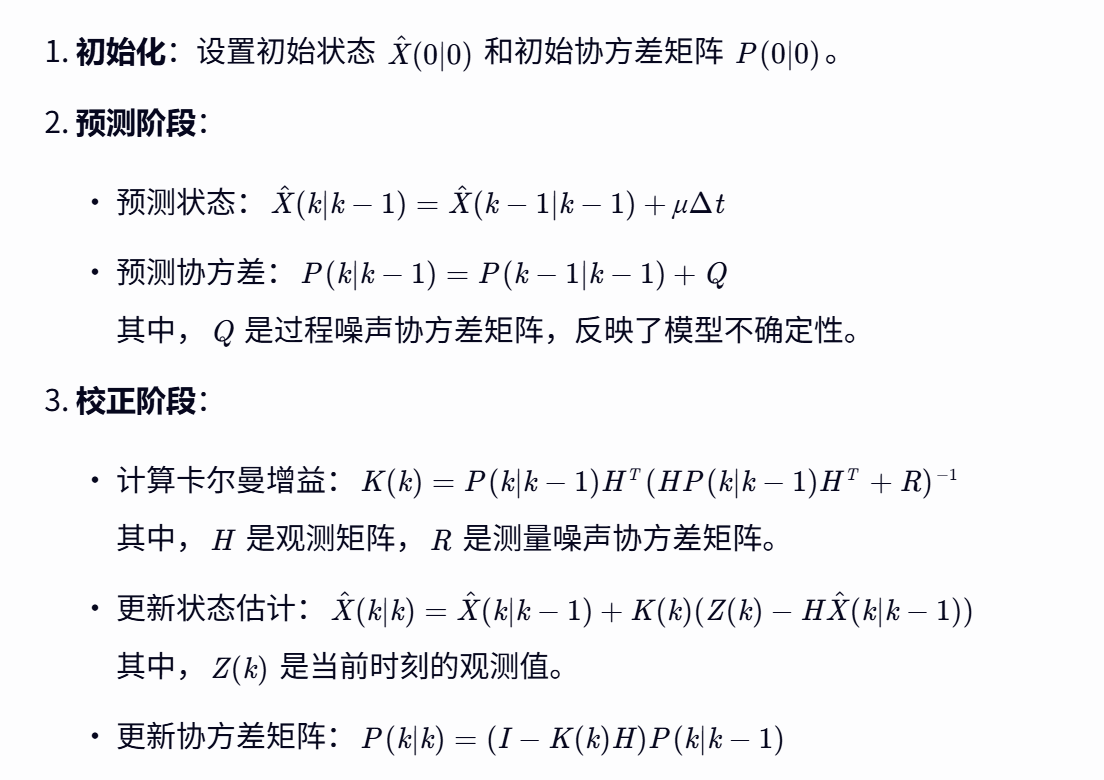
卡尔曼滤波是一种递归状态估计器,它利用系统的动态模型和观测数据来估计系统的状态。卡尔曼滤波的基本原理包括预测和校正两个阶段:
- 预测阶段:根据历史信息预测当前目标的状态。
- 校正阶段:根据当前的观测信息和预测信息,对模型参数进行校正。
卡尔曼滤波算法通过最小化估计误差的协方差矩阵来得到最优估计。然而,经典卡尔曼滤波假设系统模型和噪声统计特性是精确已知的,这在实际应用中往往难以满足。
2.2 鲁棒卡尔曼滤波
鲁棒卡尔曼滤波是对经典卡尔曼滤波的改进,旨在提高滤波算法在存在不确定性和噪声的环境下的稳定性和鲁棒性。鲁棒卡尔曼滤波通过引入鲁棒因子或采用其他鲁棒控制策略,对模型不确定性进行建模和处理,从而减小不确定性对滤波性能的影响。
一种常见的鲁棒卡尔曼滤波方法是基于H∞滤波理论的方法。H∞滤波通过最小化最坏情况下的估计误差界来提高滤波算法的鲁棒性。另一种方法是基于最大似然估计和卡尔曼滤波的组合方法,通过最大似然估计将非线性距离测量值转化为目标状态的线性观测,同时计算转化后测量噪声的统计特性,然后利用卡尔曼滤波算法进行迭代估计。
3. 鲁棒卡尔曼滤波在跟踪维纳过程中的应用
3.1 维纳过程建模
3.2 鲁棒卡尔曼滤波跟踪算法
将鲁棒卡尔曼滤波应用于跟踪维纳过程的任务中,主要步骤如下:
- 鲁棒处理:
- 引入鲁棒因子或采用其他鲁棒控制策略,对模型不确定性进行建模和处理。例如,可以采用自适应鲁棒卡尔曼滤波,根据观测数据的特性动态调整鲁棒因子或噪声协方差矩阵。
3.3 算法实现
以下是基于Matlab的鲁棒卡尔曼滤波跟踪维纳过程的简化代码示例:
matlab
% 参数设置 |
mu = 0.1; % 漂移系数 |
sigma = 1; % 扩散系数 |
dt = 0.01; % 时间步长 |
T = 10; % 总时间 |
N = T / dt; % 时间步数 |
Q = 0.01 * eye(1); % 过程噪声协方差矩阵 |
R = 0.1; % 测量噪声协方差矩阵 |
H = 1; % 观测矩阵 |
% 初始化 |
X_true = zeros(N, 1); % 真实状态 |
X_est = zeros(N, 1); % 估计状态 |
P = eye(1); % 协方差矩阵 |
X_est(1) = 0; % 初始状态估计 |
% 生成维纳过程 |
for k = 2:N |
X_true(k) = X_true(k-1) + mu * dt + sigma * sqrt(dt) * randn; |
end |
% 添加测量噪声 |
Z = X_true + sqrt(R) * randn(N, 1); |
% 鲁棒卡尔曼滤波跟踪 |
for k = 2:N |
% 预测阶段 |
X_pred = X_est(k-1) + mu * dt; |
P_pred = P + Q; |
% 校正阶段 |
K = P_pred * H' / (H * P_pred * H' + R); |
X_est(k) = X_pred + K * (Z(k) - H * X_pred); |
P = (eye(1) - K * H) * P_pred; |
% 鲁棒处理(此处简化处理,实际应用中需根据具体情况设计鲁棒策略) |
% 例如,可以根据创新序列的大小动态调整Q或R |
end |
% 绘图比较真实状态和估计状态 |
figure; |
plot(1:N, X_true, 'b-', 'LineWidth', 1.5); |
hold on; |
plot(1:N, X_est, 'r--', 'LineWidth', 1.5); |
xlabel('时间步'); |
ylabel('状态'); |
legend('真实状态', '估计状态'); |
title('鲁棒卡尔曼滤波跟踪维纳过程'); |
grid on; |
4. 仿真实验与分析
4.1 实验设置
为了验证鲁棒卡尔曼滤波在跟踪维纳过程中的有效性和优越性,我们设计了以下仿真实验:
- 真实状态生成:根据维纳过程的随机微分方程生成真实状态序列。
- 观测数据生成:在真实状态上添加高斯白噪声作为观测数据。
- 滤波算法对比:分别采用经典卡尔曼滤波和鲁棒卡尔曼滤波对观测数据进行处理,比较两者的跟踪性能。
4.2 实验结果
通过仿真实验,我们得到了以下结果:
- 跟踪精度:鲁棒卡尔曼滤波在存在测量噪声的情况下,能够更准确地跟踪维纳过程的真实状态。与经典卡尔曼滤波相比,鲁棒卡尔曼滤波的估计误差更小,跟踪性能更稳定。
- 鲁棒性:当模型参数或噪声统计特性存在不确定性时,鲁棒卡尔曼滤波能够通过自适应调整鲁棒因子或噪声协方差矩阵来保持滤波性能的稳定性。而经典卡尔曼滤波在面对不确定性时,滤波性能会显著下降甚至发散。
4.3 结果分析
鲁棒卡尔曼滤波之所以能够在存在不确定性和噪声的环境下保持稳定性,主要得益于其鲁棒控制策略的设计。通过引入鲁棒因子或采用其他鲁棒控制策略,鲁棒卡尔曼滤波能够对模型不确定性进行建模和处理,从而减小不确定性对滤波性能的影响。此外,鲁棒卡尔曼滤波还能够根据观测数据的特性动态调整滤波参数,进一步提高滤波算法的适应性和鲁棒性。
5. 结论与展望
5.1 结论
本文研究了鲁棒卡尔曼滤波在跟踪噪声测量中采样的维纳过程的应用。通过理论分析和仿真实验,我们验证了鲁棒卡尔曼滤波在跟踪维纳过程中的有效性和优越性。与经典卡尔曼滤波相比,鲁棒卡尔曼滤波能够在存在不确定性和噪声的环境下保持稳定性,提供更准确的跟踪结果。因此,鲁棒卡尔曼滤波在信号处理、金融数学等领域具有广泛的应用前景。
5.2 展望
未来的研究可以进一步探讨以下方向:
- 更复杂的鲁棒控制策略:研究更复杂的鲁棒控制策略,如基于H∞滤波、滑模控制等理论的鲁棒卡尔曼滤波算法,进一步提高滤波算法的鲁棒性和适应性。
- 多传感器信息融合:将鲁棒卡尔曼滤波与多传感器信息融合技术相结合,利用多个传感器的观测数据来提高状态估计的准确性和鲁棒性。
- 实际应用验证:在实际应用场景中验证鲁棒卡尔曼滤波的性能和效果,如金融市场的波动预测、生物医学信号处理等领域。
📚2 运行结果

部分代码:
function [x_pred, V, G, P, th]=rkiteration(A,B,C,D,V,tau,c,x,y)
%RKIteration robust Kalman iteration
%
% [x_pred, V_next, G]=RKIteration(A,B,C,D,V,tau,c,x,y) performs one
% iteration of the "delayed" robust Kalman estimator for the nominal
% discrete-time model
%
% x[n+1] = Ax[n] + Bw[n] {State equation}
% y[n] = Cx[n] + Dw[n] {Measurements}
%
% with disturbance w with variance I.
% The equation of the robust "delayed" estimator:
%
% x[n+1|n] = Ax[n|n-1] + G (y[n] - Cx[n|n-1])
%
% where y[n] past measurement, x[n|n-1] past estimate, and G robust
% Kalman gain.
%
% RKALMAN returns the new estimate x[n+1|n], the least feavorable
% covariance matrix V_next of the estimation error x[n+1]-x[n+1|n], and
% the estimator gain G.
%
% The robust estimator is designed knowing that the true model belongs to
% a ball about the nominal one. The models in that ball are such that
% the Tau-divergence between them and the nominal model is less than a
% certain tolerance. To design the estimator gain G, it is necessary to
% specify:
%
% - the tolerance c (striclty positive)
% - the parameter tau (in the interval [0,1]) of the Tau-divergence
% - the least favorable covariance matrix V of the previous estimation
% error x[n]-x[n|n-1].
%
% For more details see: "Robust Kalman filtering under incremental
% model perturbations" by M. Zorzi
%
% See also RKALMAN, MAXTOL.
% Author(s): Mattia Zorzi 20-8-2015
% parameters
n=size(A,1);
p=size(C,1);
m=size(B,2);
Q=B*B';
R=D*D';
% robust Kalman gain
G = A*V*C'*(C*V*C'+R)^-1;🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈建,向露,严明,等.基于BP神经网络和拓展卡尔曼滤波的轨迹追踪[J].计算机仿真,2024,41(01):508-512.
[2]成明峰,耿晶晶.基于高斯过程粒子滤波的WIFI信号定位追踪[J].三门峡职业技术学院学报,2023,22(01):139-143.
🌈4 Matlab代码实现


















 31
31

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









