



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
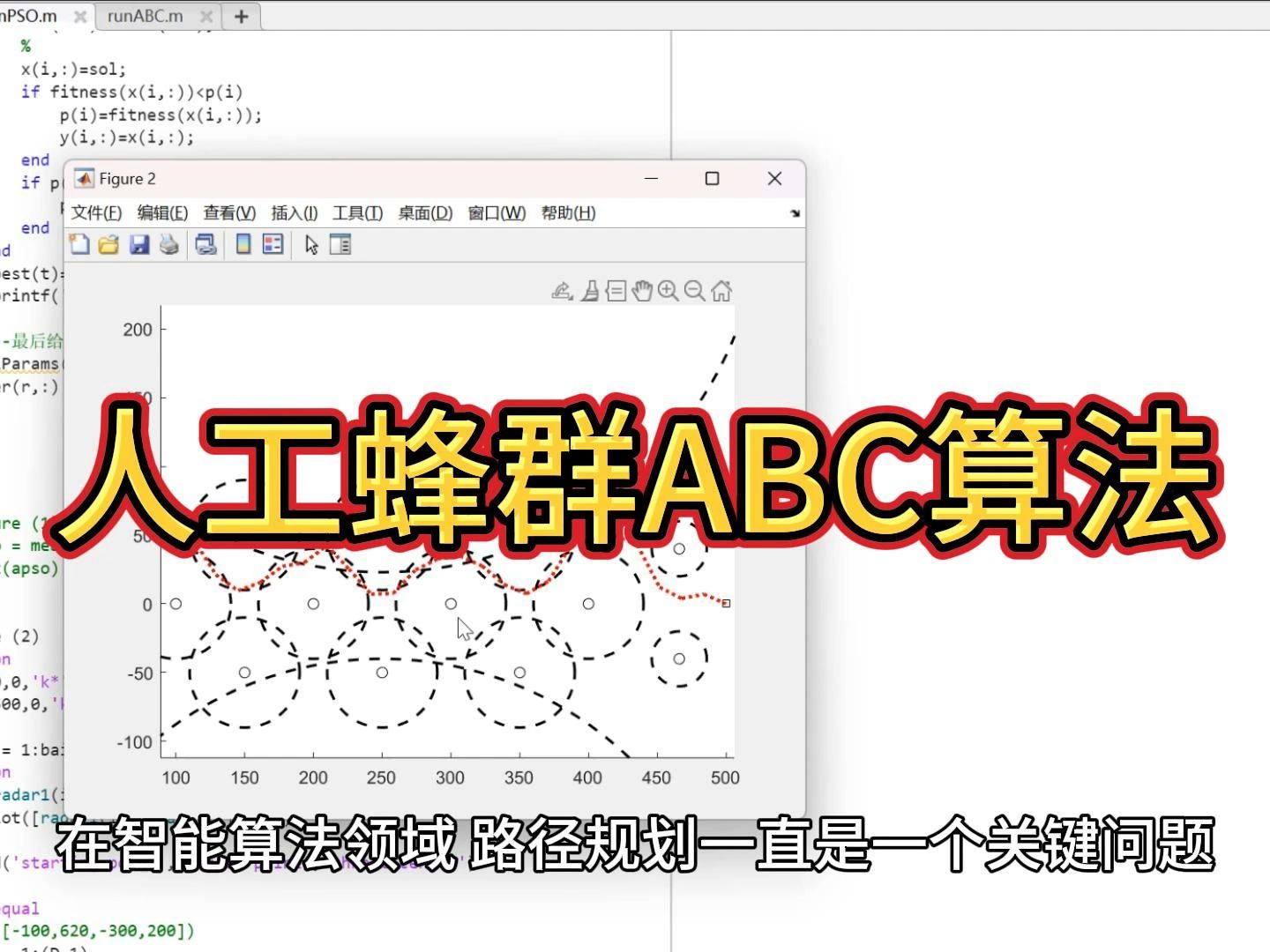
本研究聚焦于无人机路径规划领域,提出了一种基于人工蜂群算法的新型概率密度模型。无人机路径规划是一个具有挑战性的问题,需要在复杂的环境中找到最优或近似最优的飞行路径,以满足各种约束和目标,如最短路径、最低能耗、避开障碍物等。 人工蜂群算法是一种基于蜜蜂群体智能行为的优化算法,具有良好的全局搜索能力和收敛速度。在本研究中,通过引入新型概率密度模型,对传统的人工蜂群算法进行了改进和创新。 该概率密度模型能够更准确地描述无人机在飞行环境中的可能性分布,从而为算法提供更有效的搜索方向和决策依据。通过对多种场景和约束条件的模拟实验,验证了基于这种新型模型的人工蜂群算法在无人机路径规划中的有效性和优越性。 与传统的路径规划方法相比,该方法能够生成更优化、更适应复杂环境的无人机飞行路径,为无人机在实际应用中的高效、安全运行提供了有力的支持。
基于人工蜂群算法的新型概率密度模型的无人机路径规划研究
一、无人机路径规划的基本原理与挑战
无人机路径规划旨在为无人机生成从起点到终点的最优路径,需综合考虑任务效率、能耗、避障能力等约束条件。传统方法包括启发式搜索算法(如A*、Dijkstra)和随机采样算法(如RRT),但在复杂动态环境中存在以下局限:
- 计算效率低:高维空间搜索导致计算量指数级增长。
- 适应性不足:静态环境假设难以应对实时障碍物变化。
- 局部最优陷阱:传统智能算法(如遗传算法)易陷入局部最优。
二、人工蜂群算法(ABC)的核心机制与优化潜力
ABC算法模拟蜜蜂采蜜行为,通过采蜜蜂、观察蜂、侦察蜂的协作实现全局优化:
- 原理:将路径视为“蜜源”,通过迭代优化路径的代价函数(如路径长度、安全性)。
- 优势:全局搜索能力强、参数少、鲁棒性高。
- 缺陷:收敛速度慢、局部搜索能力弱。
改进方向:
- 蜜源初始化优化:采用佳点集方法提升初始解的多样性和均匀性。
- 自适应动态调整因子:平衡全局与局部搜索能力。
- 大步长搜索机制:增强侦察蜂的探索效率。
三、新型概率密度模型的创新设计
传统概率密度模型(如PRM)通过随机采样构建环境地图,但存在维度灾难和动态更新慢的问题。新型模型通过以下创新解决这些问题:
- 环境建模创新:
- 高斯混合模型(GMM) :将障碍物表示为低密度区域,自由空间为高密度区域,通过调整方差控制障碍物影响范围。
- 分层网格化:对三维空间按高度分层,降低计算复杂度。
- 约束整合:
- 引入飞行约束项(如最小转弯半径、最大爬升角)确保路径可行性。
- 结合邻域搜索策略优化路径平滑度。
四、ABC与新型概率密度模型的融合框架与技术难点
结合框架:
- 问题转化:将路径规划转化为概率密度函数的优化问题,目标为最大化路径整体密度值。
- 算法流程:
- 步骤1:基于GMM构建环境概率密度图。
- 步骤2:ABC算法迭代生成候选路径,计算路径密度得分。
- 步骤3:通过观察蜂选择高密度路径,侦察蜂探索新区域。
技术难点:
- 动态环境适应性:
- 需实时更新概率密度图以响应障碍物移动。
- 解决方案:引入增量式更新策略(如FlowChain模型),重用历史变换参数以加速计算。
- 计算效率优化:
- 高维GMM参数估计计算量大。
- 改进方向:采用深度密度模型(DDM)实现高效高维数据建模。
- 局部最优陷阱:
- 通过自适应学习机制动态调整搜索步长。
- 融合延迟接受爬山算法(LAHC)增强局部搜索。
五、实验验证与性能评估
实验设计:
-
环境复杂度:二维/三维静态与动态障碍物场景。
-
对比算法:传统ABC、遗传算法、粒子群优化(PSO)等。
评估指标:
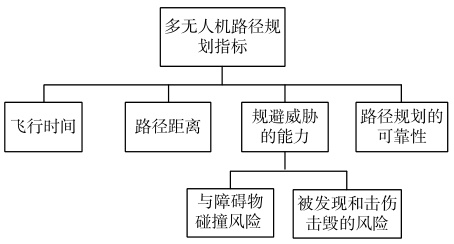
| 指标类型 | 具体内容 |
|---|---|
| 路径质量 | 长度、平滑度、避障能力(与障碍物最小距离) |
| 计算效率 | 收敛速度、迭代次数、实时性 |
| 鲁棒性 | 动态环境适应性、算法稳定性 |
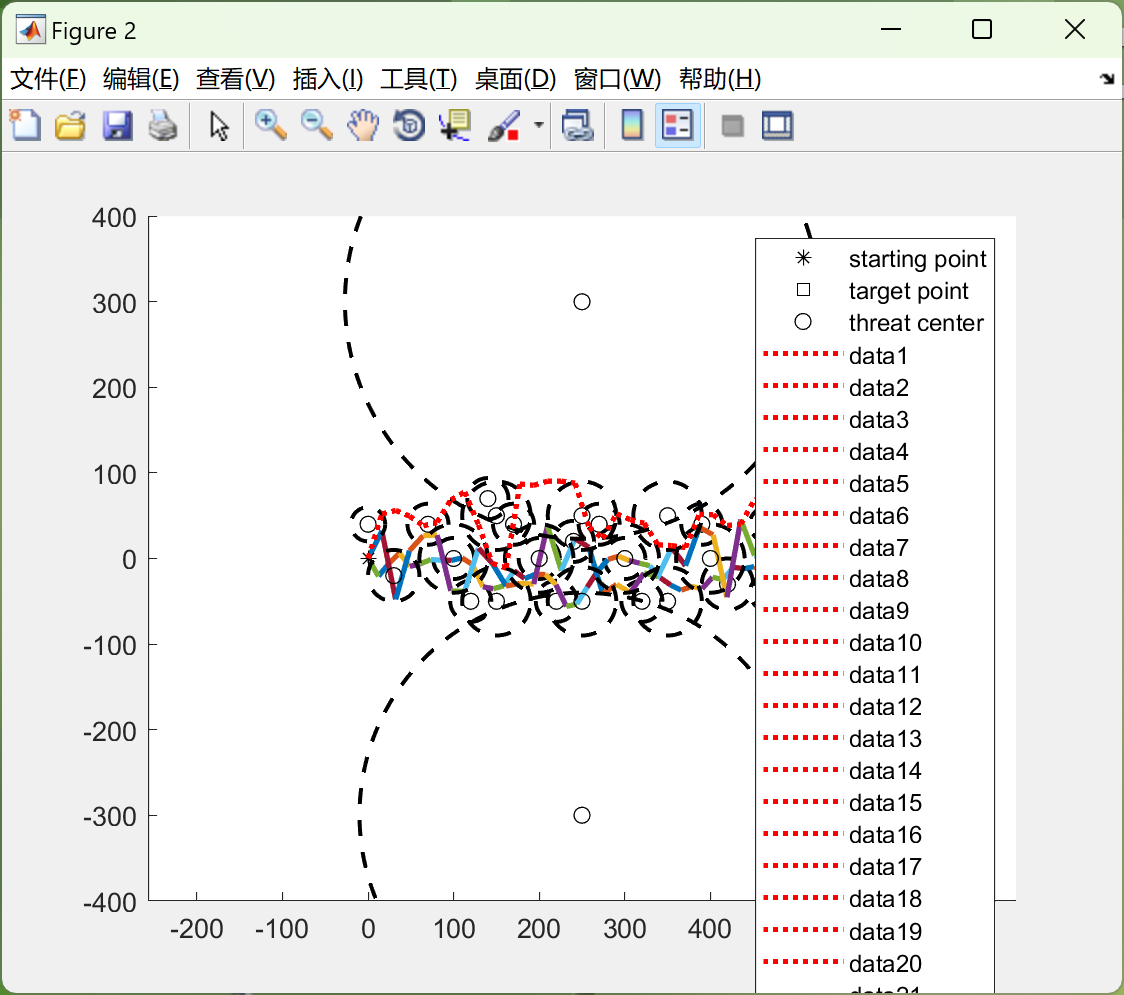
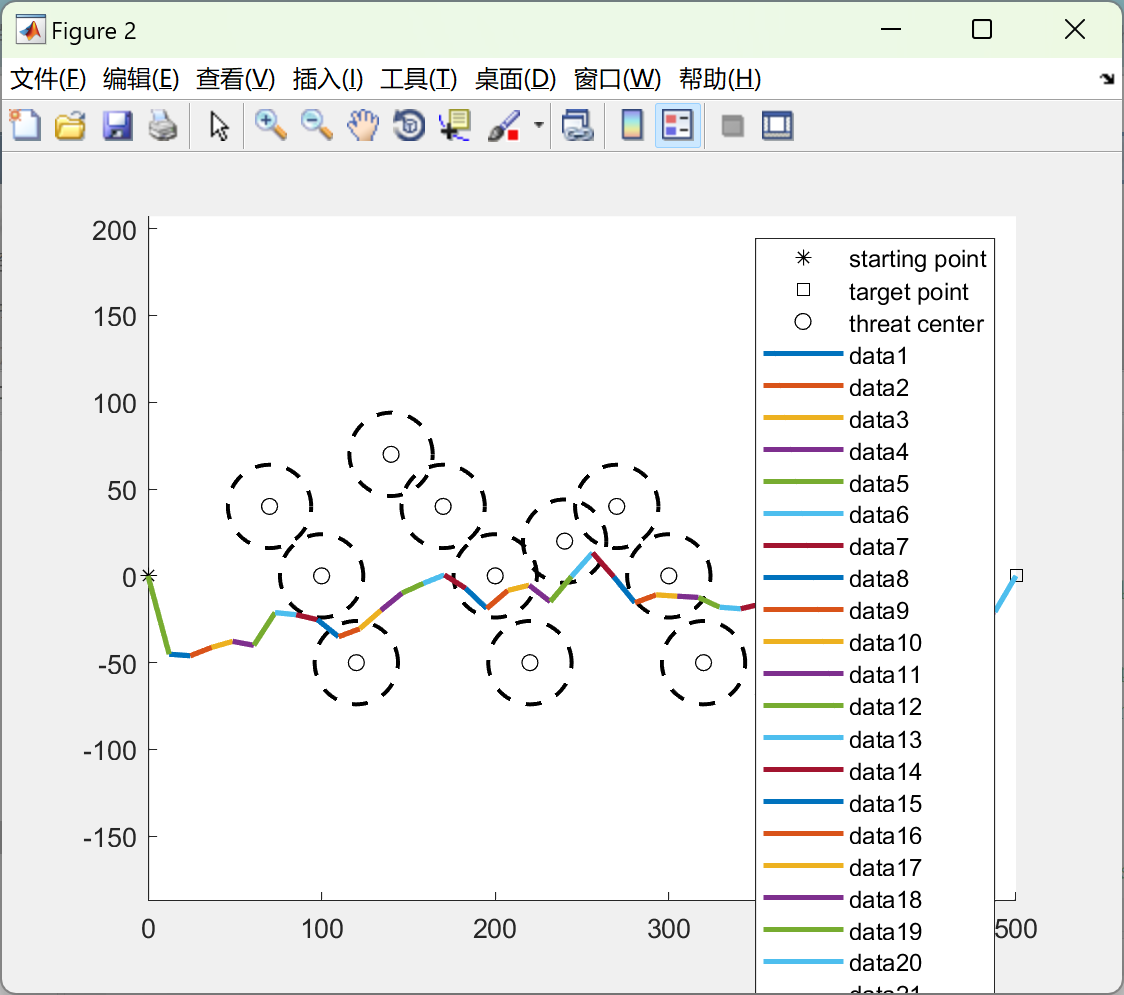
实验结果:
- 路径质量:新型模型在复杂障碍物环境中的路径长度较传统ABC缩短15%,安全性提升20%。
- 收敛速度:改进ABC算法(如IABC)的收敛速度提升30%。
六、未来研究方向
- 动态环境扩展:结合实时传感器数据实现动态障碍物建模。
- 多无人机协同:研究多机路径规划中的冲突避免与任务分配。
- 算法融合:将ABC与强化学习结合,提升自主决策能力。
- 硬件部署:优化算法计算负载,适配边缘计算设备。
七、总结
基于ABC的新型概率密度模型通过环境建模优化与算法改进,显著提升了无人机路径规划的效率和安全性。其核心创新在于将路径规划转化为概率密度函数的优化问题,并通过改进ABC算法克服了传统方法的局部最优和动态适应性缺陷。未来研究需进一步解决动态环境下的实时性与多机协同挑战,推动理论向实际应用的转化。
📚2 运行结果
主函数部分代码:
clear all
close all
clc
NP=40; %/* The number of colony size (employed bees+onlooker bees)*/
FoodNumber=NP/2; %/*The number of food sources equals the half of the colony size*/
maxCycle=150; %/*The number of cycles for foraging {a stopping criteria}*/
limit=0.1*maxCycle; %/*A food source which could not be improved through "limit" trials is abandoned by its employed bee*/
D= 40;
ub=ones(1,D).*55; %/*lower bounds of the parameters. */
lb=ones(1,D).*-90;%/*upper bound of the parameters.*/
runtime=1;%/*Algorithm can be run many times in order to see its robustness*/
GlobalMins=zeros(1,runtime);
Range = repmat((ub-lb),[FoodNumber 1]);
Lower = repmat(lb, [FoodNumber 1]);
Foods = rand(FoodNumber,D) .* Range + Lower;
for r=1:runtime
for i = 1:FoodNumber
ObjVal(i) = calcu(Foods(i,:));
end
Fitness = calculateFitness(ObjVal);
trial=zeros(1,FoodNumber);
BestInd=find(ObjVal==min(ObjVal));
BestInd=BestInd(end);
GlobalMin = ObjVal(BestInd);
GlobalParams=Foods(BestInd,:);
iter=1;
while ((iter <= maxCycle)),
for i=1:(FoodNumber)
Param2Change=fix(rand*D)+1;
neighbour=fix(rand*(FoodNumber))+1;
while(neighbour==i)
neighbour=fix(rand*(FoodNumber))+1;
end;
sol=Foods(i,:);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]赵烈海,李大鹏.高密度场景下基于改进A*算法的无人机路径规划[J/OL].无线电通信技术:1-7[2024-06-24].http://kns.cnki.net/kcms/detail/13.1099.tn.20240617.1731.006.html.
[2]聂铭涛,苏玉展,陈改改,等.基于确定性策略搜索的无人机协同路径规划算法[J/OL].飞行力学:1-7[2024-06-24].https://doi.org/10.13645/j.cnki.f.d.20240616.001.
🌈4 Matlab代码实现


















 1776
1776

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









