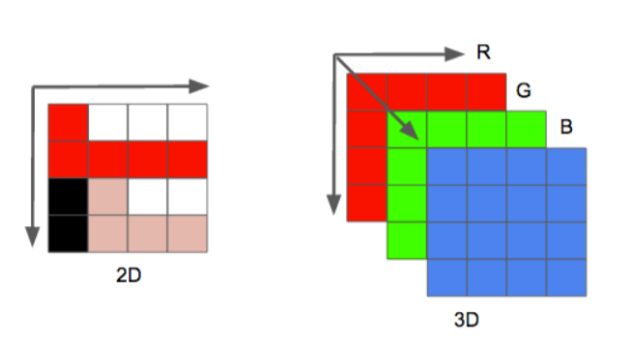
文章目录 前言 二维RGB图像 成像原理 数据准备 图片加载 算法实现 生成点云 点云显示 完整代码 总结 前言 废话不多说,直接开造。这里的话我们有两个目标,第一个是如何把一个2维图片上的点映射到3维空间。第二就是如何生成3D点云。当然实际上这是一个大问题,因为只要解决了第一个问题,第二个问题就是“送分” 二维RGB图像 在说到3D点云之前我们就不得不说到RGB图像,也就是一些二维图像。 图像以像RGB三个通道的形式进行存储。也就是这样: 平时我们看到的就是左边的2D图像,实际上是以右边的形式存储的。 那么从我们的矩阵角度来看的话,大概是这个样子的: [ [[r,g,b]








 超级会员免费看
超级会员免费看
 本文介绍了如何使用Python将2D RGB图像转换为3D点云。首先,解释了RGB图像和成像原理,接着讨论了如何通过相机参数和深度信息还原3D坐标。通过加载和处理深度图,应用算法实现3D点云的生成,并展示了使用open3d库显示点云的效果。最后,文章提到这种方法得到的点云精度有限,建议使用更先进的AI算法如middlepipe来提升效果。
本文介绍了如何使用Python将2D RGB图像转换为3D点云。首先,解释了RGB图像和成像原理,接着讨论了如何通过相机参数和深度信息还原3D坐标。通过加载和处理深度图,应用算法实现3D点云的生成,并展示了使用open3d库显示点云的效果。最后,文章提到这种方法得到的点云精度有限,建议使用更先进的AI算法如middlepipe来提升效果。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1006
1006

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








