



本文详细介绍了基于MQTT协议实现多奥梯控系统与AGV、机器人(狗)、AMR等智能设备的集成对接方案。系统采用MQTT发布/订阅模式构建分布式架构,支持低带宽环境下的实时通信,重点解析了单层权限下发、门禁控制、电梯外呼及状态读取等核心功能指令。文章结合实际应用场景(如医院配送、园区巡检等)提出优化建议,并展望了与楼宇自控、人脸识别等系统的生态融合可能,为智能楼宇和无人化物流提供了完整的技术参考。
多奥梯控系统与 AGV、机器人(狗)、AMR 基于 MQTT 协议的集成对接方案详解
本文围绕AGV、机器狗、AMR 等智能移动设备通过 MQTT 协议对接多奥梯控门禁系统的技术实现路径,深入解析通信机制、关键指令、状态反馈、实际应用场景及优化建议。全文结合协议规范、工程实践和未来扩展性视角,为智能化楼宇、智慧园区、无人化物流等场景提供完整的技术参考。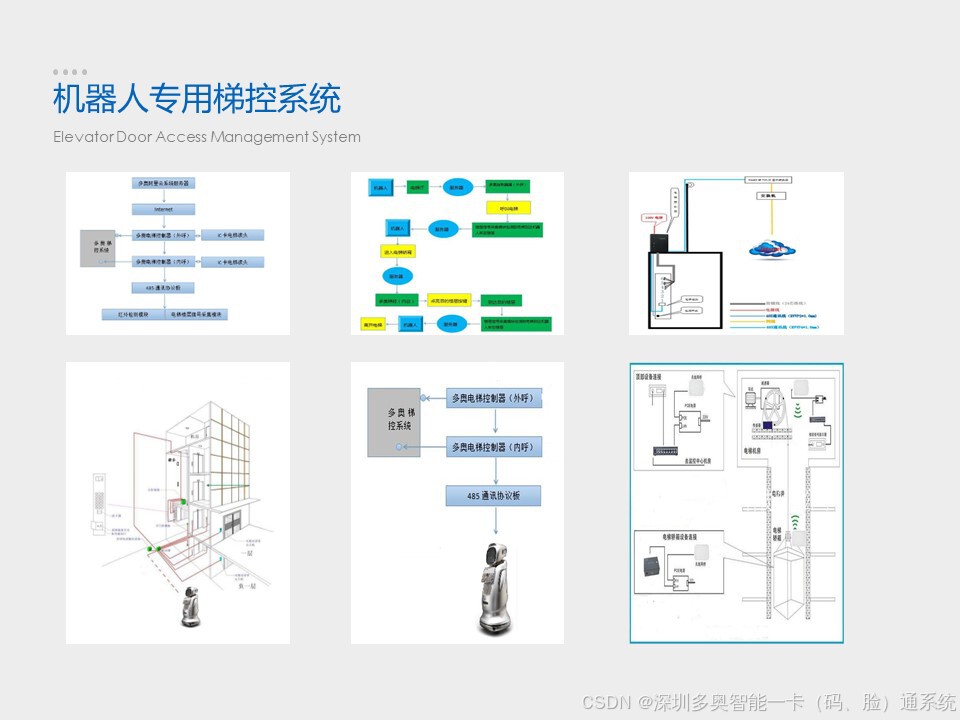
一、系统架构概览:基于 MQTT 的分布式协同控制模型
多奥梯控系统采用 MQTT 发布/订阅模式构建松耦合的物联网通信架构,支持第三方设备(如 AGV、机器人、人脸识别终端)作为独立客户端接入统一消息总线。其核心优势在于:
- 低带宽适应性强:适用于电梯井道内信号不稳定或无线网络受限环境;
- 异构系统兼容性高:不同厂商设备可通过标准主题(Topic)交互数据;
- 事件驱动响应快:轿厢状态变化实时推送,提升调度效率;
- 可扩展性强:支持新增楼层、新增设备无需重构通信逻辑。
📌 核心通信路径:
- 发布主题(Publisher): DA/Dwr/ID_Sx → 第三方发送控制命令至多奥系统
- 订阅主题(Subscriber): DA/Drd/ID_Sx → 接收来自多奥系统的状态反馈与事件通知
- (ID_Sx 为梯控/门禁设备唯一标识符)
该结构实现了“命令下行 + 状态上行”的双向闭环控制,是实现全自动无人运输的关键基础设施。
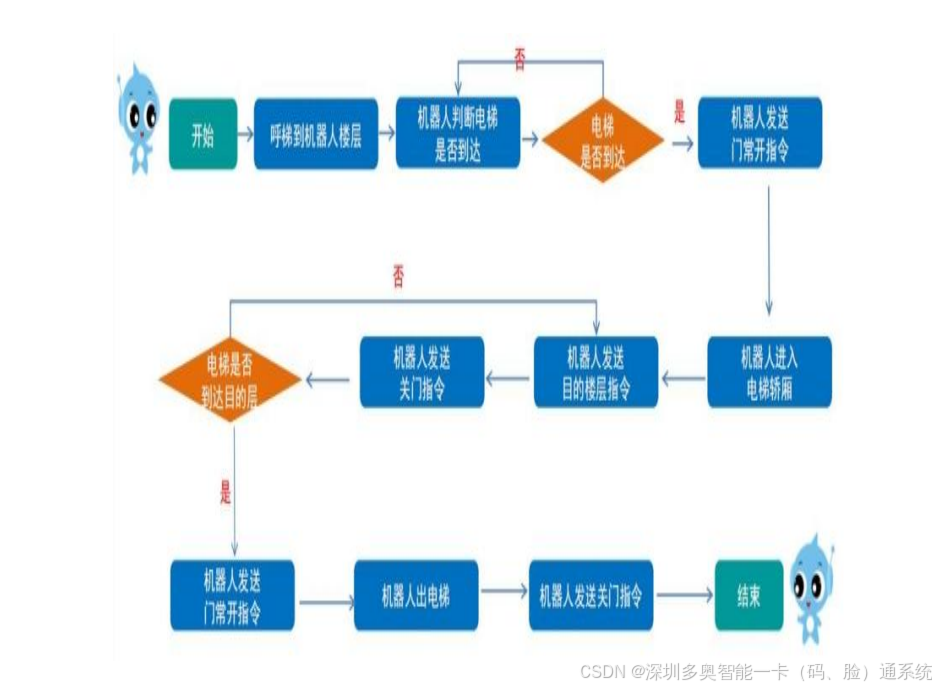
二、关键控制指令解析:聚焦 AGV/AMR 实际需求的最小功能集
尽管多奥系统支持丰富的控制接口,但针对 AGV、机器人、AMR 类移动载体,仅需关注以下四个核心功能点即可完成全流程乘梯任务:
✅ 1. 单层权限下发 + 自动按键(内召控制)
- 用途:当 AGV 进入电梯轿厢后,自动触发目标楼层召唤。
- 实现方式:
- {
- "Session": 0,
- "Command": "CALL_FLOOR",
- "Floor": 5,
- "DeviceID": "ID_S1"
- }
- 发送至主题:DA/Dwr/ID_S1
- 技术要点:
- 需确保 AGV 已进入轿厢并被检测到(可通过 IO 输入或视觉识别辅助判断);
- 多奥系统将模拟物理按键动作点亮 COP 面板对应按钮;
- 支持负层数(如地下2层 = 65534),避免楼层映射错误。
⚠️ 注意事项:若多个设备同时请求,应由中央调度系统做冲突仲裁,防止误操作。
✅ 2. 开启门禁通道(人行闸机 / 地面门禁)
- 用途:开启通往电梯厅的门禁或闸机,允许 AGV 通行。
- 实现方式:
- {
- "Command": "OPEN_DOOR",
- "Duration": 5000 // 毫秒
- }
- 主题:DA/Dwr/ID_Sx(ID_Sx 对应门禁控制器)
- 联动策略建议:
- 结合 RFID 或 UWB 定位,在 AGV 距离门口 2 米时预开启;
- 可读取门状态反馈(IO 回路)确认是否成功开启,形成闭环验证;
- 支持定制“门状态”上报字段(如常开、报警、故障等)。
✅ 3. 电梯外呼控制(上下行自动按键)
- 用途:在 AGV 到达电梯厅前,远程发起上行/下行呼叫,减少等待时间。
- 推荐配置:加装 外呼梯控模块(DOP),替代依赖轿厢内按钮的传统逻辑。
- 典型流程:
- AGV 规划路径 → 目标楼层 = 8F,当前位于 1F;
- 向多奥系统发送外呼指令:
- {
- "Command": "EXTERNAL_CALL",
- "Direction": 2, // 2=上行
- "TargetFloor": 1
- }
- DOP 控制器驱动外呼面板亮灯,电梯响应并下行至 1F;
- 门开启后 AGV 驶入,再执行内召指令前往 8F。
💡 为什么必须使用外呼? 若仅靠 AGV 入梯后按内召,会导致:
- 电梯无法提前响应;
- 多台 AGV 竞争资源造成拥堵;
- 不符合消防梯运行规则(需保持外部呼梯优先);
- 因此,外呼是实现精准调度的前提条件。
✅ 4. 实时读取电梯轿厢运行状态(状态感知)
- 用途:让 AGV 决策系统了解电梯当前位置、方向、开关门状态,决定是否驶入或等待。
- 订阅内容:从 DA/Drd/ID_Sx 主题接收 JSON 报文,包含以下字段:
字段含义取值说明ElevatorStatus运行方向0=未知, 1=停止, 2=上行, 3=下行CurrentFloor当前楼层1~128 正常层;65535=-1, 65534=-2...DoorStatus门状态0=未知, 1=开门到位, 2=正在开关门, 3=关门到位CargoStatus货物占用0=未知, 1=占用, 2=空LivingBody是否有人0=未知, 1=有, 2=无
- 应用示例:
- if data['DoorStatus'] == 1 and data['CargoStatus'] == 2:
- agv.move_into_elevator()
- elif data['ElevatorStatus'] in [2, 3]:
- agv.wait_outside(timeout=30)
🔍 深度价值:此状态流可接入 AGV 调度平台(如 Fleet Manager),实现动态路径重规划、避堵策略、能效优化等高级功能。
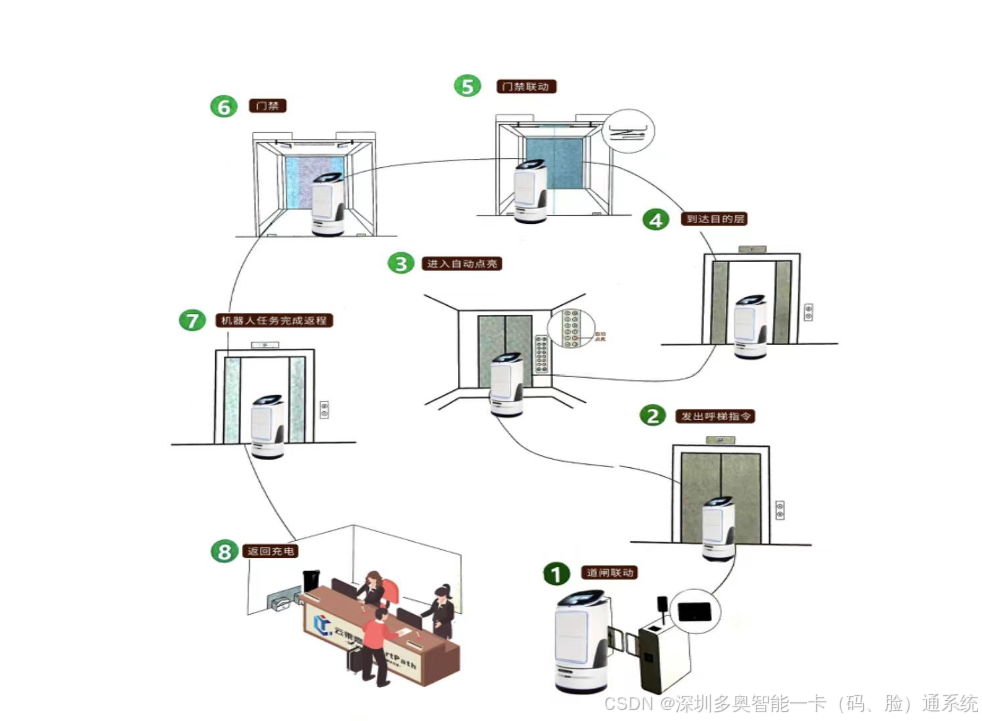
三、典型应用场景枚举与工程优化建议
应用场景描述技术挑战解决方案医院药品配送 AGV × 多电梯协同多台 AGV 在门诊楼、住院部间穿梭送药,跨楼层频繁调用电梯资源竞争激烈,响应延迟大引入中央调度器统一分配电梯资源,优先级分级(急诊 > 日常)产业园区巡检机器人乘梯巡查机器狗每日定时巡查各楼层消防通道、温湿度如何判断电梯是否适合进入?综合 CargoStatus=2 且 DoorStatus=1 才允许驶入智能制造工厂 AMR 上下立体仓库AMR 将物料从地面仓运往三楼组装线负载大件物品,需确认轿厢空间使用红外/激光传感器辅助判断“空载”,并与 CargoStatus 联动验证写字楼夜间清洁机器人作业清洁机器人夜间自动启动,逐层清扫安全性要求高,不能与人共乘设置策略:仅当 LivingBody=2 且非高峰时段才允许运行
🛠️ 工程优化建议:
- 增加心跳机制:定期发布 Ping 消息检测连接稳定性;
- 启用 QoS 等级 1 或 2:确保关键命令不丢失;
- 会话持久化(Clean Session = false):断线重连后恢复未处理消息;
- 加密传输(TLS over MQTT):防止非法设备伪造指令;
- 边缘计算前置过滤:本地网关预处理状态数据,降低云平台负载。
四、与其他系统的集成可能性拓展(生态融合视角)
虽然当前以 AGV/机器人为主角,但多奥 MQTT 接口具备极强的横向扩展能力:
🔗 1. 与 BA(楼宇自控)系统联动
- 将电梯运行状态写入 BACnet/IP 或 Modbus TCP 总线;
- 实现空调、照明随电梯使用情况自动调节(节能模式);
- 异常状态上传至 SCADA 平台告警。
🔗 2. 与人脸识别门禁融合
- 人脸验证通过 → 触发外呼 + 开启门禁;
- 访客预约系统自动分配电梯权限时间段;
- 数据打通至物业ERP,实现访客轨迹追踪。
🔗 3. 接入小程序 / APP / 公众号
- 用户手机一键呼叫电梯(类似华为鸿蒙的“超级终端”体验);
- 支持语音输入:“我要去地下车库”,自动转换为 Floor=65535;
- 提供可视化乘梯进度条,提升用户体验。
🔗 4. 构建数字孪生电梯监控平台
- 所有 DA/Drd 主题数据接入 Kafka + Flink 流处理引擎;
- 实时渲染每部电梯的三维运行状态;
- 结合 AI 预测维护周期(如根据开关门次数预测皮带磨损)。
五、总结:迈向真正“无人化”的最后一公里
AGV、机器人、AMR 要实现端到端自主移动,跨越楼层障碍是最后一道技术门槛。而多奥梯控系统通过标准化的 MQTT 协议开放能力,正成为连接“地面交通”与“垂直交通”的桥梁。
🎯 核心结论:
- 必须部署外呼系统(DOP),否则无法实现真正的自动化调度;
- 状态感知比命令下发更重要——只有看得懂电梯行为,才能做出最优决策;
- 安全冗余设计不可忽视:建议结合机械限位、激光雷达、超声波等多种传感手段进行多重校验;
- 协议虽轻,系统要重:单个 MQTT 消息可能只有几十字节,但背后需要强大的调度算法、异常处理机制和运维体系支撑。
未来,随着 AIoT、边缘计算、自动驾驶 L4 技术下放,我们有望看到:
- 电梯主动“召唤”AGV 补货;
- 多部 AGV 协同拼梯,提高运输密度;
- 电梯根据历史流量预测预留运力……
这不仅是“机器人乘电梯”的故事,更是城市空间智能化演进的重要缩影。
📌 附录:常用字段速查表
参数数值含义ElevatorStatus0=未知, 1=停止, 2=上行, 3=下行CurrentFloor1~128: 正常层; 65535=-1, 65534=-2,...DoorStatus0=未知, 1=开门到位, 2=正在开关门, 3=关门到位CargoStatus0=未知, 1=占用, 2=空LivingBody0=未知, 1=有, 2=无Session请求填 0,应答返回原值用于匹配
如有进一步开发需求(如批量控制、权限有效期设置、日志审计接口),建议联系多奥研发团队获取完整 SDK 与测试沙箱环境。


















 979
979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











