



机器人(狗)AGV\AMR乘梯控制系统方案设计书
本方案设计了一套完整的智能机器人(AGV/AMR/机器狗)自主乘梯控制系统。系统通过独立传感器网络实时监测电梯运行状态(楼层/门状态/轿厢环境),采用无源节点安全控制电梯运行,支持MQTT/Modbus等多种协议与机器人交互。核心功能包括:精准楼层定位、安全门状态检测、活物识别、网络化远程控制等,实现机器人自主呼叫电梯、登记楼层、安全进出轿厢的全流程自动化。系统采用模块化设计,兼容各类电梯品牌,提供有线/无线多种组网方案,满足智慧楼宇中机器人物流配送、巡检等垂直运输需求。
前言:智能机器人乘梯控制系统是用来帮助机器人在乘坐电梯时获取电梯的楼层信息,轿厢门开关状态,以及帮助机器人呼叫电梯和登记目的楼层的控制系统。机器人是时代发展的趋势,机器人服务会成为生活,工作中重要的部分,用长远的眼光去部署机器人应用是时代的选择,也是占领智慧园区(社区)、智慧医疗、智能酒店、智能写字楼(建筑)建设的科技制高点的必要条件。智能建筑不仅要考虑人、车的通行出入口控制系统,机器人(狗)AGV\AMR的通行门禁、闸机及乘坐垂直交通工具--电梯也成为必需。多奥机器人自主乘梯系统,可以不断享受到系统升级特别是项目功能定制带来的优越体验感,以及不断适应物联网发展的刚性需求。智能梯控系统与机器人进行协议(MQTT\TCP\HTTP\RS-485\Modbus TCP或RTU等)对接,通过协议对接的方式实现机器人自主乘梯。机器人自主乘梯可根据实际项目需求,提供局域网乘梯方案或4G\5G互联网乘梯或LORA近场通讯等方案。
AGV/AMR/机器狗无人化乘梯系统集成梯控与门禁,支持多场景扩展,采用"感知-控制-通信"架构,需保持电梯无休眠,支持多种通讯协议,适用于智能工厂及物流场景。
一、智能梯控系统功能及特点
1、当梯控接受到AGV机器人\AMR\机器狗指令需要不停给电梯发送开门命令控制开门时,电梯本身不能有开门超时强制关闭逻辑(电梯本身功能),不能超时影响到开门指令;同理,其他楼层按键连续接受指令也不能取消登记,即电梯防捣蛋功能能需取消;电梯关门指令一般情况下由电梯本身逻辑实现,也可由多奥梯控接受AGV、机器人、AMR、机器狗关门信号去控制。
2、智能梯控与机器人、机器狗、AGV\AMR如采用RS-485对接需双工通讯且实时反馈电梯运行状态;其他如:MQTT\TCP\HTTP\4G\5G\LORA\Modbus TCP或RTU等)对接请咨询多奥售前技术人员了解方案;现在422/232很少用。
3、电梯如有节能模式(特别提醒梯控取电必须在前端)尽量让电梯保持无休眠状态,假如有休眠也不应对实际使用电梯产生影响。
4、当梯控接受到AGV\机器人\AMR\机器狗指令登记(呼梯)成功之后,电梯应响应且驶向所在楼层,平层后打开门;如若电梯就在当前楼层,呼梯(注意有两种模式:A,真正的外呼呼梯即轿厢外上下按键;B,轿厢内所在楼层按键)之后无论是那种模式均可开门。
5、单开门电梯多奥梯控默认使用主门;如电梯是贯通门或双开门(主操、副操、残操)请提前告知多奥落实具体方案。
6、电梯现场梯控改造完成后,多奥有测试工具通过DEMO发送模拟数据验证机器人、机器狗、AGV、AMR乘梯流程。
7、智能呼梯为何有两种模式:A,轿厢外上下按键;B,轿厢内楼层按键?请咨询多奥。
8、特殊情况:触摸屏按键、电梯触摸按键、协议模式、DOP等请咨询多奥了解方案。

硬件设备功能特点介绍
1 、纯硬件独立的感知传感系统,不依赖电梯本身器件获取轿厢运行状态信息跟电梯PLC无关,可以适配各种品牌型号的电梯,当然多奥也可以走协议对接(需电梯公司支持)。
2、梯控使用无源节点连接,与原电梯系统完全隔离,不会对电梯原有性能产生任何影响。
3、布线超级简单,电梯门禁系统提供网络接口,客户可以采用WIFI或者4G联网方式,布线简单,施工方便。
4 、十多年就只做梯控让多奥有在写字楼、医院、酒店等繁忙环境中长时间服务的案例,系统久经考验,稳定可靠。
5 、为机器人(狗)AGV\AMR公司对接梯控提供详细的协议资料,并提供乘梯系统模拟DEMO程序。
二、电梯门禁系统设备及相关参数
梯控主板通信接口 RS485,TCP,Modbus
控制楼层 楼层扩展板控制16层楼,最大可以驱动4个楼层扩展板控制64层(如有更高楼层,请咨询多奥获取方案)
楼层传感器 2路光电信号感知
开关门传感器 有源接近开关
陀螺仪
激光测距
货物检测
人体(活物)检测
U感
RFID楼层标签
RFID读卡器
工作电压 12V直流
工作电流 正常工作约200mA
工作温度 -10~70℃
工作湿度 15~95%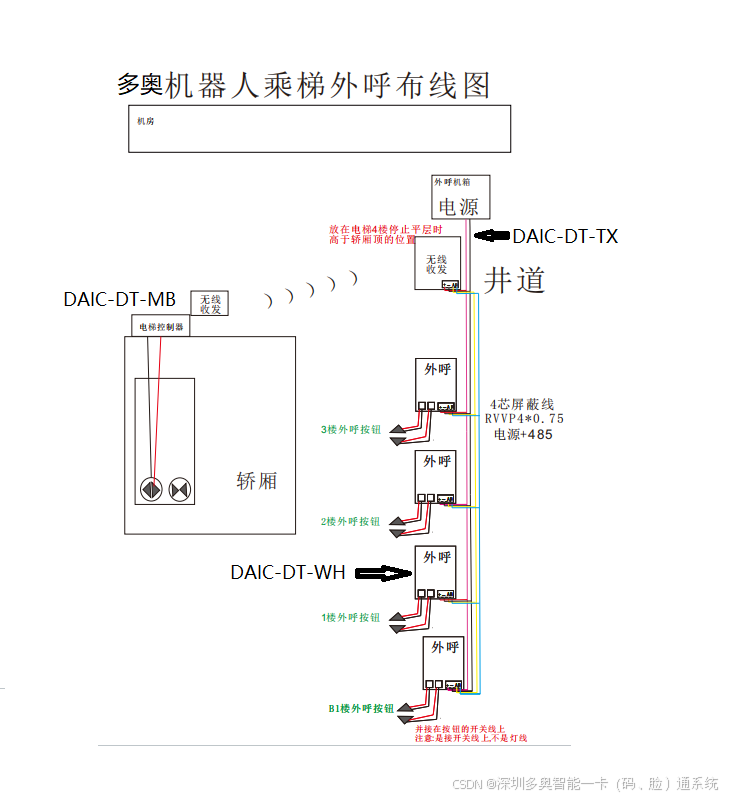
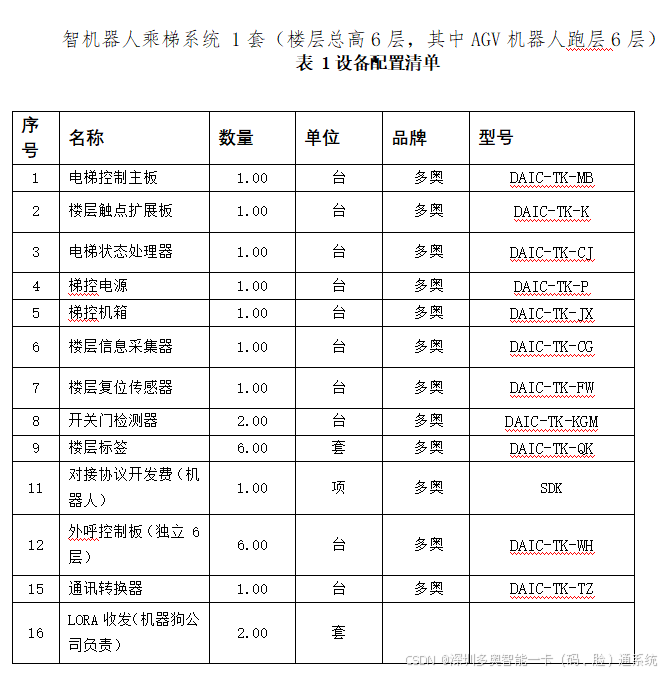
三、梯控设备主要清单
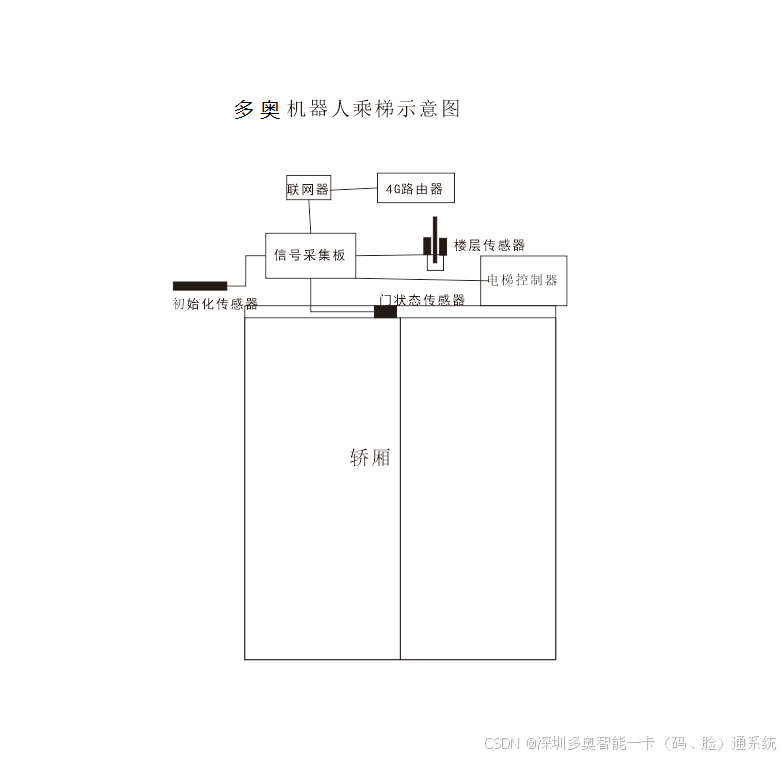
智能机器人乘梯层控型电梯控制系统包括:智能电梯控制器、楼层触点扩展板、 货物(人体)传感器、开关门检测器、楼层传感器、联网器、信号采集器板。
梯控主板:控制电梯按钮,包括楼层按钮和开门按钮
楼层传感器:获取电梯的楼层信息
活物传感器:装在电梯轿厢顶,人体感应
四、电梯轿厢运行状态
开关检测门传感器:检测电梯轿厢门的开关状态
信号采集处理板:接入传感器,处理传感器信息,并和机器人进行交互
联网器(协议对接转换):可接入路由器或交换机,乘梯设备接入网络用
多奥AGV/AMR/机器狗乘梯控制系统方案,该系统通过梯控与电梯门禁集成实现自动化设备无人化乘梯。核心功能包括自主呼梯、楼层切换及多场景门禁扩展,支持RS-485、MQTT等多种通讯协议。方案详细说明了乘梯流程、特殊场景处理及电梯改造要点,强调需保持电梯无休眠状态,并确保电气隔离。系统采用"感知-控制-通信"架构,可扩展至闸机等门控设备,构建智能通行生态。建议联系技术支持获取定制化方案,包括电梯适配确认、协议选择等具体实施细节。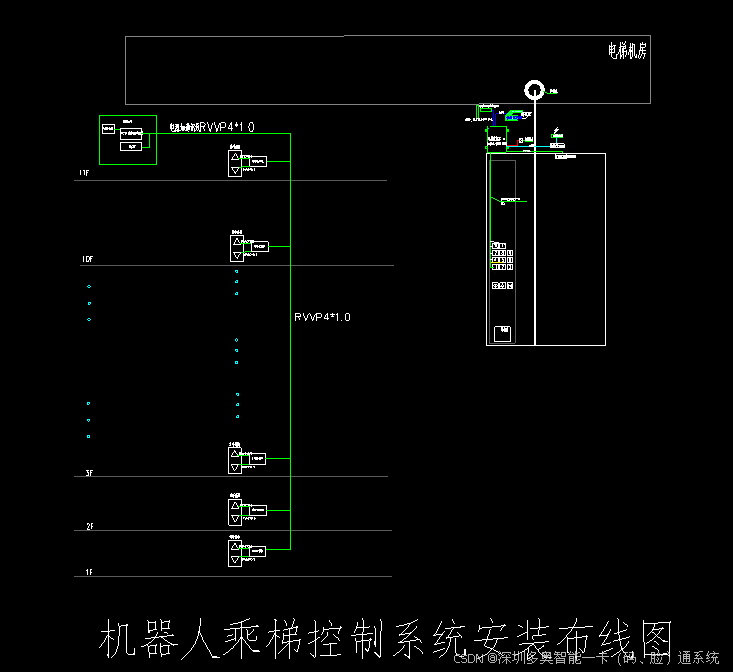
五、机器人自主乘梯通行流程图
AGV、机器人、AMR、机器狗乘梯流程举例(近场通讯与远程包括云端或本地部署调度服务器方式略有不同,具体请咨询多奥了解):
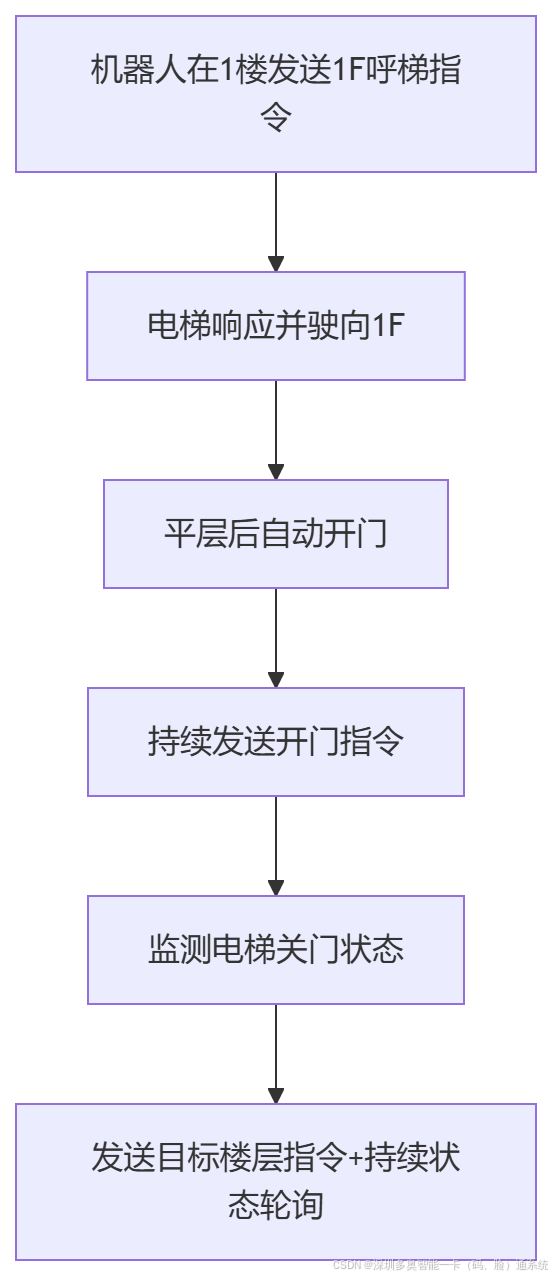
1) 所在楼层:梯控接受到AGV机器人\AMR\机器狗呼梯指令让电梯到达AGV、机器人、AMR、机器狗所在楼层之后电梯会自动开门,进入(AGV、机器人、AMR、机器狗实时查询轿厢运行状态,由梯控给)
例如:机器人在1楼给1F呼梯指令→电梯到达1F开门→循环发送开门指令(确保机器人在轿厢内)→收到电梯关门状态→发送目标楼层(电梯轿厢运行状态查询指令伴随其中,进行不间断轮询)
2) 目的楼层:AGV、机器人、AMR、机器狗到达目标楼层之后,电梯门会自动打开
例如:机器人在1楼(所在楼层且已判断进入轿厢内)给2F(目的楼层)呼梯指令→电梯到达2F自动开门→循环发送开门指令(确保机器人出电梯不会被夹)→收到电梯开门状态→出轿厢(电梯轿厢运行状态查询指令伴随其中,进行不间断轮询)
六、系统安装布线图
- 尽可能将电梯停在最低楼层。
- 使用钥匙打开COP面板。
- 将电梯打到停止或检修状态。
- 读头安装,目前读头可明装,也可嵌入式安装(与电梯按键面板持平)公司标准嵌入式安装,开孔及固定时电梯须断电处理。(选配)
- 控制器接线及固定,控制器取电一般在电梯检修控制盒插座取AC220V交流电,如插座已备使用,可增加排插或从直接从控制盒内部取,放线固定及开孔需电梯维保人员指导配合。
- 上轿厢顶处理电源,无线网桥,梯控控制器,状态采集器等。

其中主控制箱含主控制板和系统电源,为系统逻辑和控制中心和系统供电;楼层测器检测电梯当前楼层及上下行状态;开门监测器监测轿箱门开关状态;内呼按钮控制根据主控制器的指令进行楼层选择(和楼层开放)控制;TCP/485转换器进行通信方式的转换,负责主控制系统与后台本地平台的命令与数据的传输。乘梯系统把电梯运行状态实时提供给机器人,并接受机器人的命令进行召梯、开门、关门和选层乘梯。
1)需在电梯机房和轿箱顶部附近提供交流220V电源供IC卡设备使用。
2)电梯控制系统的设备需安装于电梯机房和轿箱顶部,电梯公司应考虑电梯主控制器(箱体尺寸:350mm×350mm×110mm)在电梯轿厢顶的安装位置并提供相关的图纸。
3)甲方在设备安装调试时,需有专业电梯维护人员在现场提供支持。
4)乙方提供机房到轿顶的6*0.75mm2随行线缆,用于群控器、联网、消防等设备与主控器间的通讯,提供RS-485通讯线(RVVP2*0.5)以便电梯智能系统联网(如用Lora,消防信号也到了轿厢顶则不用考虑此项)。其布线施工绑扎等需要电梯公司现场技术指导及配合。
5)电梯公司现场配合第三方方采用无源干接点方式截取电梯按键信号线的接入,如需直接对插免破线则需提供按键正面图,背面图及详细插口公母尺寸说明。
七、开放协议
提供机器人想要的简单易懂数据协议供机器人公司对接
智能机器人(AGV/AMR/机器狗)自主乘梯控制系统方案。系统采用独立传感器网络实时监测电梯运行状态,通过无源节点安全控制电梯,支持MQTT/Modbus等多种协议交互。核心功能包括精准楼层定位、安全门检测、活物识别等,实现机器人全流程自主乘梯。系统采用模块化设计,兼容各类电梯品牌,提供有线/无线组网方案,满足智慧楼宇中机器人物流配送、巡检等垂直运输需求。方案详细说明了乘梯流程、特殊场景处理及电梯改造要点,强调需保持电梯无休眠状态并确保电气隔离。


















 983
983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











