







编码实现乌龟运动控制,让小乌龟做圆周运动。
实现分析:
- 乌龟运动控制实现,关键节点有两个,一个是乌龟运动显示节点 turtlesim_node,另一个是控制节点,二者是订阅发布模式实现通信的,乌龟运动显示节点直接调用即可,运动控制节点之前是使用的 turtle_teleop_key通过键盘 控制,现在需要自定义控制节点。
- 控制节点自实现时,首先需要了解控制节点与显示节点通信使用的话题与消息,可以使用ros命令结合计算图来获取。
- 了解了话题与消息之后,通过Python 编写运动控制节点,通过指定的话题,按照一定的逻辑发布消息即可。
实现流程:
- 通过计算图结合ros命令获取话题与消息信息。
- 编码实现运动控制节点。
- 启动 roscore、turtlesim_node 以及自定义的控制节点,查看运行结果。
1.话题与消息获取
准备: 先启动键盘控制乌龟运动案例。
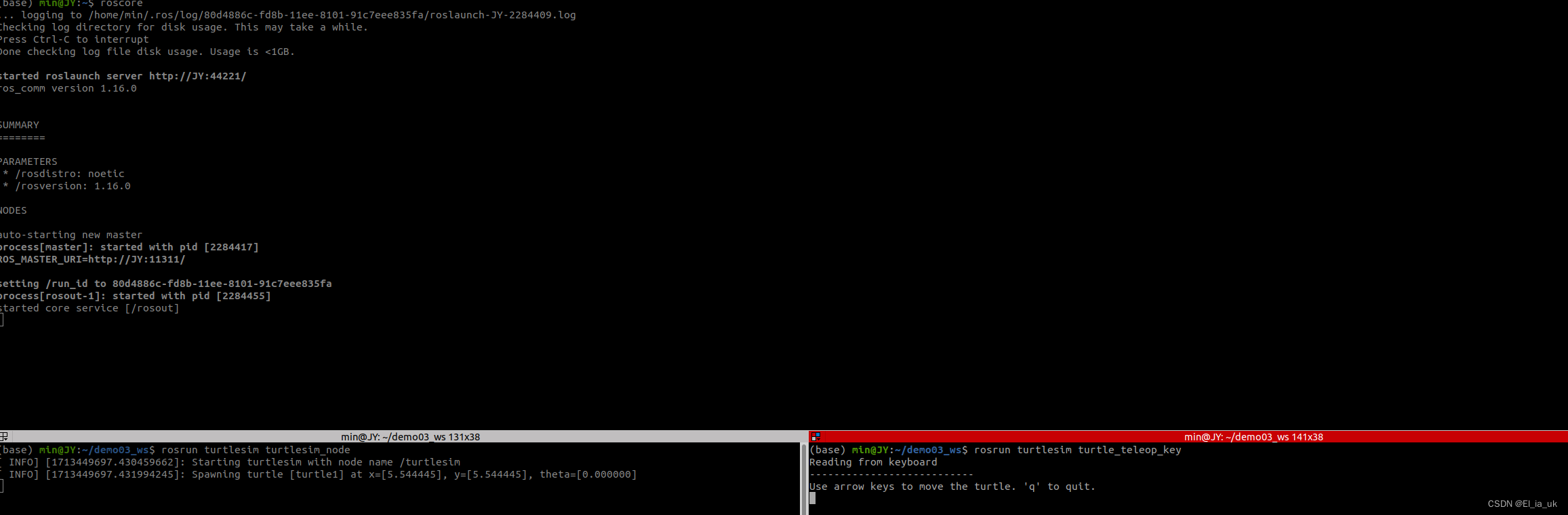
显示:
1.1话题获取
获取话题:/turtle1/cmd_vel
通过计算图查看话题:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1992
1992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









