




实时三维(3D)单粒子追踪利用光学反馈来锁定自由扩散的纳米级荧光粒子,从而实现精确的3D定位和连续的光谱测量。本文描述了一种新的实时3D单粒子追踪方法,其中一个衍射极限的激光点通过二维(2D)电光偏转器和可调声学梯度透镜动态地在三维空间中扫过检测体积。这种优化的方法称为3D动态光子定位追踪(3D dynamic photon localization tracking,3D-DyPLoT),能够以高速度实时追踪单个涂有二氧化硅的非闪烁量子点(直径约30纳米),其扩散速度超过10μm²/s,计数率低至10kHz,以及YFP标记的类病毒粒子。大的有效检测区域(1μm × 1μm × 4μm)使系统能够轻松捕捉快速移动的粒子,同时仍然展示出高定位精度(σx = 6.6纳米,σy = 8.7纳米,σz = 15.6纳米)。总体而言,3D-DyPLoT提供了一种快速而稳健的方法,用于基于单一激发和检测通路对快速且低发射粒子的实时3D追踪,为更广泛地应用于相关生物问题铺平了道路。
揭示生物系统中分子物种动态的动力促使了越来越高的空间和时间分辨率成像方法的发展。不幸的是,所有这些方法都涉及一个权衡,即空间分辨率和规模的获得以牺牲时间分辨率为代价,从而限制了探测分子或粒子的最终速率。这一问题的合理解决方案来自于实时三维(3D)单粒子追踪(real-time three-dimensional (3D) single-particle tracking,RT 3D-SPT)。RT-3D-SPT利用压电台克服移动粒子的运动,使其相对于物镜保持静止。因此,可以随意使用任何光谱方法对粒子进行探测,其时间分辨率仅受可收集光子的数量限制。
至今,RT-3D-SPT 的实现一直受到需要收集大量光子的限制,以便追踪快速移动的粒子。唯一一份超过 10 μm²/s 的连续追踪报告要求发射率超过 100 kHz。其他研究已经展示了跟踪低发射粒子(直到单分子)的令人印象深刻的能力,但仅在甘油或更黏稠的细胞基质存在的情况下进行。
大多数还具有复杂的光学布局,由多个检测或激发路径组成,这些路径需要精确对准,使得实施变得困难。在这封信中,我们描述了一种不同的方法。我们使用二维电光偏转器(two-dimensional electro-optic deflector,2D-EOD)和可调声学梯度(tunable acoustic gradient,TAG)透镜在三维中生成一个动态移动的激光点。这个飞行的3D激光点使我们能够根据光子到达时间来估计粒子的位置。这种新方法称为3D动态光子定位追踪(3D dynamic photon localization tracking,3D-DyPLoT),通过在三维中实现优化的位置估计算法,以提高RT-3D-SPT的速度、稳健性和灵敏度,使能够追踪扩散速度超过10 μm²/s且发射频率接近20 kHz的三维粒子,包括直径约30纳米的量子点和在溶液中用荧光蛋白标记的单病毒颗粒的扩散。
RT-3D-SPT由两个单独但通常混合的步骤组成:
- 首先,必须读取粒子的位置。
- 其次,这个读取结果用于控制压电台的定位,并将其中心放在粒子上。
在这封文书中,我们应用了从二维电动陷阱(2D electro-kinetic trap ,ABEL)的开发中学到的经验,该陷阱利用电渗流(electroosmotic flows)在二维中捕获溶液中的分子,以便在RT-3D-SPT中进行位置估计,采用压电台。特别是,我们将为ABEL陷阱得出的优化位置估计扩展并应用于三维和压电跟踪,而不是电动捕获。
在这项工作之后,粒子的位置信息和不确定性可以通过高斯假定密度滤波器和卡尔曼滤波器获得,前提是满足以下假设:
- (1)X、Y 和 Z 之间的协方差为零;
- (2)每个箱子的平均光子数小于 1;
- (3)背景与信号相比很小且均匀。
卡尔曼更新方程如下:(1) ,(2)
,(2)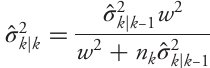
其中w是激光束的协方差(在本文中,wxy为200纳米,wz为500纳米),ck是光束位置,nk是检测到的光子数量,σk是位置估计(xk)的标准差。预测方程描述了估计在连续观测之间是如何演变的:(3)![]() ,(4)
,(4)![]()
预测步骤假设布朗运动,即位置不变,但方差根据预期扩散系数发生变化。为了实现实时跟踪,粒子的位置估算被积分并作为补偿控制施加到压电平台上。压电平台驱动样品,使得粒子位置相对于观察体积中心的积分随时间的变化等于零。为了应用此算法,必须实现一个时间依赖的激光模式 (ck) (图 1)。为此,一个准直的 405 纳米 (Coherent OBIS, 聚焦时约 120 nW) 或 488 纳米 (FCD488-30, JDSU, 聚焦时约 20 nW) 激光被发送通过 2D-EOD (ConOptics) 和 TAG 镜头,这两者能够在三维中偏转激光。然后,使用 100 × 物镜 (蔡司 Plan Apo, NA 1.49) 将光束聚焦到样品上。由于位置信息包含在移动的激光点中,采集路径很简单,仅需要一个探测器。在这里,大多数收集到的光子 (90%) 被导向到雪崩光电二极管 (APD, SPCM-AQRH-15, Excelitas) 以用于跟踪算法,而剩余的光子 (10%) 被导向到 sCMOS 相机 (pco.edge 4.2, PCO) 以监测被跟踪的粒子。
位置信息反馈通过使用一个二维压电平台(Nano-PDQ,MadCity Labs,谐振频率:1080 Hz X,840 Hz Y)在XY平面上执行。轴向方向的反馈是使用高速物镜位置器(Nano-OPHS,MCL,谐振频率2 kHz)来实现的。
2D-EOD通过2D骑士巡游移动束光,覆盖对象平面上每边为1微米的5 × 5平方网格,该网格由FPGA(NI 7852)生成。骑士巡游的优点是能够快速采样大区域,而不会受到光栅扫描固有延迟的影响。在扫描的每个点上,2D-EOD在指定时间(τ)内保持静止,同时收集光子并估计XY位置。2D-EOD的控制,以及在给定的时间和位置估计下收集光子计数,都是在FPGA上执行的。
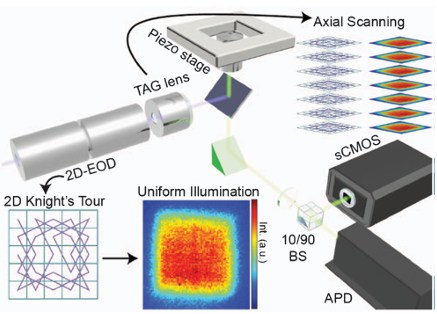
通过在动态移动的激光点中阶段扫描一个固定的190纳米荧光小球,评估了估计颗粒在目标聚焦体积中的位置的能力(图2)。使用2D-EOD扫描骑士棋巡游,颗粒强度在1μm × 1μm的正方形内是均匀的[图2(a)]。对于xk[图2(b)]和yk[图2(c)]的位置估计结果显示,正方形中心处的值为零,两侧则有正负峰值。
为了实现轴向追踪,以前的RT-3D-SPT实现依赖于生成两束光束,一束在焦点上方,一束在焦点下方,或在不同焦平面上使用多个探测器,其信号比例是颗粒焦点位置的线性指标。在此,我们采用TAG透镜,根据时间的变化来偏转光束沿轴向方向。TAG透镜在保持在某些共振频率下的衍射极限性能的同时,沿轴向方向偏转光束。TAG透镜不能像EOD情况那样通过直流信号驱动到特定的焦平面,因此,我们没有对光子计数进行分箱,而是在每个光子到达的时刻提取TAG透镜的相位。相位通过机载正弦计算转换为轴向位置,为每个光子提供精确的激光位置,从而能够实时估计颗粒的轴向位置。
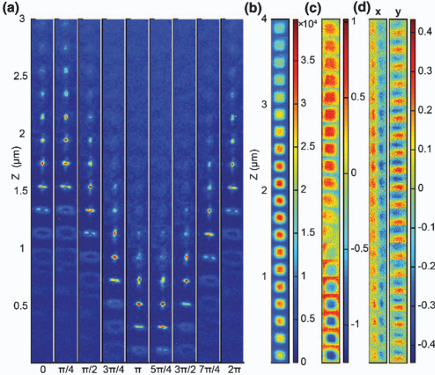
当TAG透镜激活时(35%幅度,70 kHz共振),由2D-EOD映射的方形图形在不损失保真度的情况下延伸到较长的轴向距离[图3(b)]。TAG透镜使得2D骑士巡游在中心焦平面以上和以下偏转,从而可以估计粒子的轴向位置(zk) [图3(c)]。这里的线性控制响应范围为2微米,但积分控制器在4微米的范围内有效,并且可以通过调整TAG透镜幅度来增加。值得注意的是,xk和yk的读数在整个轴向扫描范围内保持保真度[图3(d)]。这三个值(xk,yk和zk)与一个积分控制器和一个3D压电平台结合使用,以实现实时3D单粒子追踪。
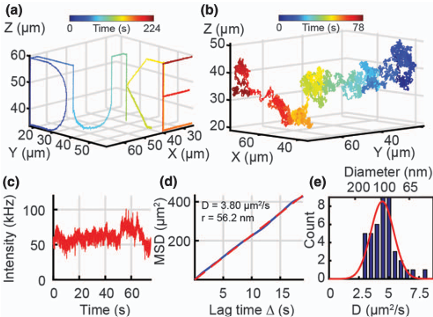
3D-DyPLoT在追踪3D运动方面应用简单。图4展示了它在一个固定的190纳米粒子上应用,该粒子通过微型平台(Microdrive,MadCity实验室)驱动。当追踪机制启用时,压电平台抵消微型平台的所有运动,能够在轴向方向上以高保真度轻松跟踪粒子,跟踪范围达40微米。重要的是,3D-DyPLoT善于追踪自由的3D扩散,能够在较低强度(<100 kHz)下长时间稳定跟踪水中的100纳米荧光纳米粒子。图4(和Visualization 1)展示了一个直径为100纳米的荧光小球在水中(约20 fM)的示例轨迹。对42条轨迹的均方位移(Mean squared displacement,MSD)分析显示,平均扩散系数为4.44 ± 0.14 μm²/s,对应的水动力学直径为97.9(94.9,101)纳米,经过高斯拟合。需要注意的是,图4(b)和4(c)中观察到的强度和z位置之间的反向相关性是由球面像差引起的,未来的工作中可以通过使用水浸没物镜来减少这一影响。
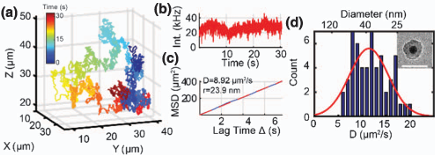
该方法的主要优点是能够在高速和低光子计数率下进行追踪。由于观察区域较大(1 μm × 1 μm × 4 μm),系统可以轻松从大扩散跳跃或发射体的暗期中恢复过来。它也非常适合使用压电台进行追踪,因为有限的带宽导致台对粒子的跟踪有时会滞后,滞后幅度相当大。这种在低计数率和高扩散速度下进行追踪的综合能力使我们能够在水中(∼20 fM)追踪被抑制闪烁的二氧化硅涂层“巨型”量子点(“giant” quantum dots,gQDs)。这些粒子的计数率在10到50 kHz之间,扩散速度在6到22 μm²/s之间(图5和可视化2)。实施抑制闪烁的gQDs是因为追踪过程中荧光的闪烁会导致粒子的丢失和轨迹的终止。55条轨迹的MSD分析得到了11.4 ± 0.6 μm²/s的平均扩散速度,对应的水动力直径为38.1(36.2,40.3)nm, 与TEM数据(29.9 ± 2.4 nm)和之前通过动态光散射测量的相似制备粒子的水动力数据相符。此外,3D-DyPLoT可以轻松应用于生物相关现象,例如单个病毒颗粒的细胞外行为。作为原理证明,我们在PBS中追踪了表达VSV-G-YFP融合的囊泡性口腔炎病毒假病毒颗粒,激发波长为488 nm。对44条轨迹的MSD分析显示出167 nm和347 nm的峰值。
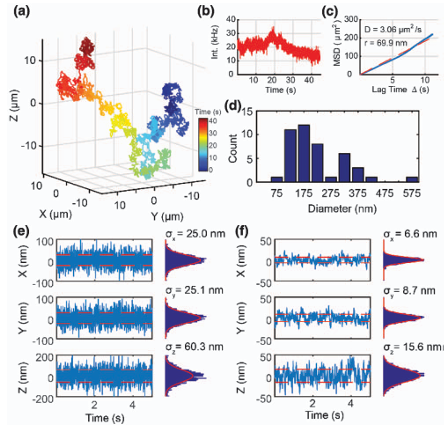
大小分布中的更高峰值归因于病毒颗粒的聚集。这些结果证明了3D-DyPLoT在捕捉快速、生物相关过程方面的强大能力,能够在长时间内进行监测。任何3D跟踪方法的一个关键方面不仅是它能够跟踪的粒子的速度,还有它能够跟踪的精度。图6(e)和6(f)展示了将3D-DyPLoT应用于固定纳米颗粒。当用与高速跟踪相同的积分常数进行跟踪时,X和Y方向的精度可达到25纳米,Z方向为60纳米,计数率约为80 kHz,时间分辨率为1毫秒[图6(e)]。当跟踪较慢的粒子时,可以通过将积分反馈控制器的常数降低10倍来以速度换取精度。这不仅减少了压电台的响应时间,还减少了反馈环路的振铃和超调,从而使X和Y方向的横向精度分别提高至6.6和8.7纳米,轴向精度为15.6纳米,计数率约为80 kHz [图6(f)]。这表明该方法在高速和高精度之间的灵活性。
最后,RT 3D-SPT 一个至关重要且常常被低估的方面是首先能够捕捉到粒子。较大的跟踪范围(1 μm × 1 μm × 4 μm)使得 3D DyPLoText在捕捉许多连续粒子方面非常熟练,而不会遗漏中间的粒子。可视化 4 和可视化 5 分别展示了在 SiO2(二氧化硅) 上对 100 nm 小球和 gQD 的连续粒子跟踪。连续粒子的跟踪能力允许快速积累具有统计相关性的数据集,并进一步将 RT-3D-SPT 应用于解决生物问题。
在这里,我们展示了一种强大的新方法,可以在三维空间中实时追踪低发射和快速扩散的粒子,采用单一激发和单一检测通路。该新方法的关键是一个最佳位置估计算法,用于增强在其他实时三维单粒子追踪显微镜中使用的传统积分控制。该算法通过2D-EOD和尖端TAG透镜实现,创造出一个动态移动的激光点,这是进行三维位置估计的先决条件。该方法的优点在于提高了速度和鲁棒性,并且只需一个激发和一个发射通路,减少了重复复杂对准过程的需求。实施简便性与高速能力的结合,将使3D-DyPLoT能够应对广泛的生物相关粒子追踪应用。
参考文献:
Robust real-time 3D single-particle tracking using a dynamically moving laser spot(2017)

















 1072
1072

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









