






1.rosdep: command not found
这是因为没有安装python-rosdep
sudo apt install python-rosdep
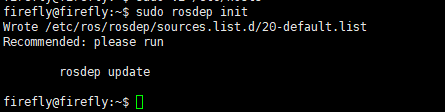
2.rosdep init报错

很可能是因为 https://raw.githubusercontent.com 这个网址被墙了
我们可以通过修改映射地址访问
2.1 查询IP
首先使用IPAddress查看该网址解析后的IPV4地址
https://githubusercontent.com.ipaddress.com/raw.githubusercontent.com
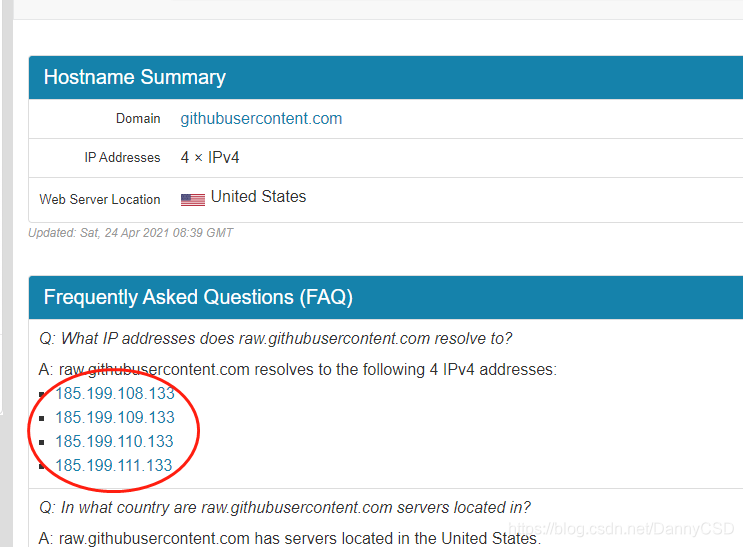
可以看到解析后的IP地址,任选一个复制
2.2 修改映射文件
sudo vi /etc/hosts
插入复制的IP地址和域名
185.199.108.133 raw.githubusercontent.com
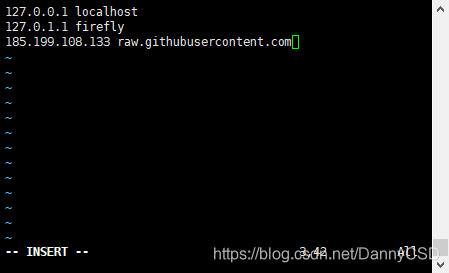
保存退出,重新执行rosdep init即可,可以看到运行成功
如果还是失败,可以使用方法3.3
3.rosdep update报错

这是读取,下载超时
- 解决方法1
多试几次,运气好可能成功 - 解决方法2
有梯子的同学,搭个梯子,也能解决 - 解决方法3,万能方法,可直接解决问题2和问题3
下载该文件并解压到用户根目录下
https://download.youkuaiyun.com/download/DannyCSD/17913880
然后进行操作
cd
#创建文件夹
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
#将下载的文件移动到ros文件下
sudo mv rosdistro /etc/ros/rosdistro
#复制进入新的list文件
sudo cp /etc/ros/rosdistro/20-default.list /etc/ros/rosdep/sources.list.d/20-default.list
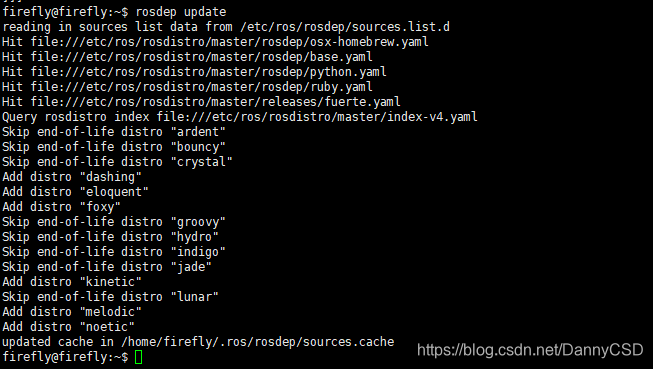
#重新执行rosdep update
rosdep update
还不成功,可以改变rosdistro文件
sudo vi /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
改动下面的代码
#DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
DEFAULT_INDEX_URL = 'file:///etc/ros/rosdistro/master/index-v4.yaml'
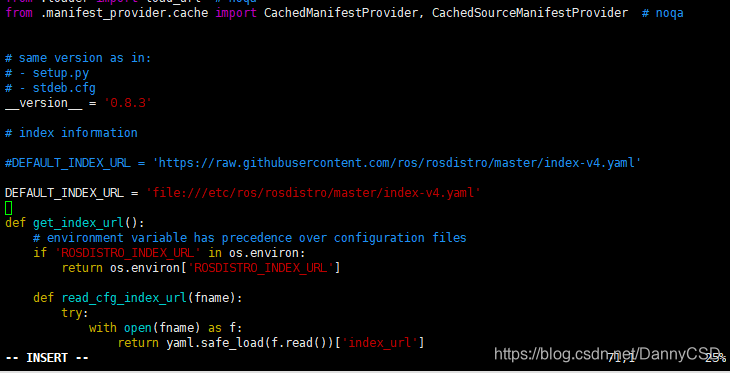
多试两次rosdep update,肯定能成功


















 1743
1743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











