




目录
1. 简述
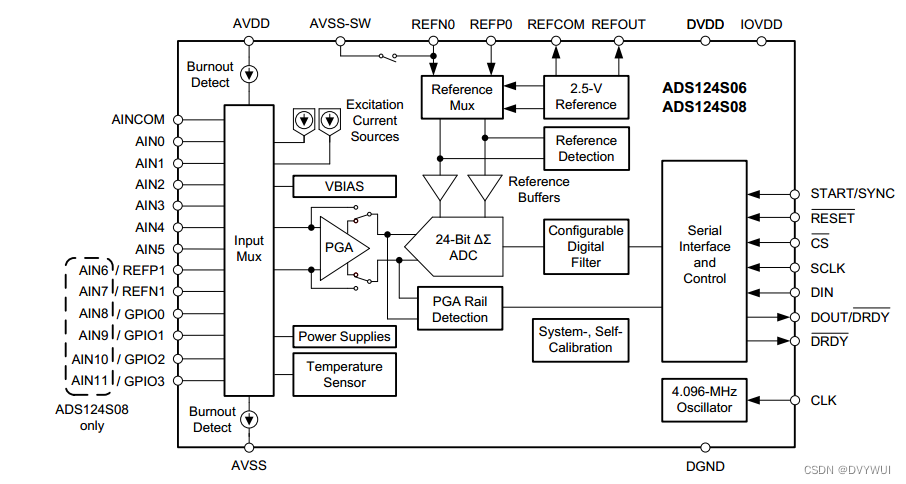
ADS124S08具有 PGA 和电压基准的低功耗、低噪声、高集成度12 通道4kSPS、24 位 Δ-Σ ADC,串行外设接口 (SPI) 兼容接口,可选用循环冗余校验 (CRC), 其配有可配置的数字滤波器,能够在嘈杂的工业环境中提供低延迟转换结果和 50Hz 或60Hz 噪声抑制。可编程增益放大器 (PGA) 具备低噪声特性,并且可提供 1 到 128 的增益,能够为电阻桥或热电偶应用放大低幅值 信号。
1.1 功能框图
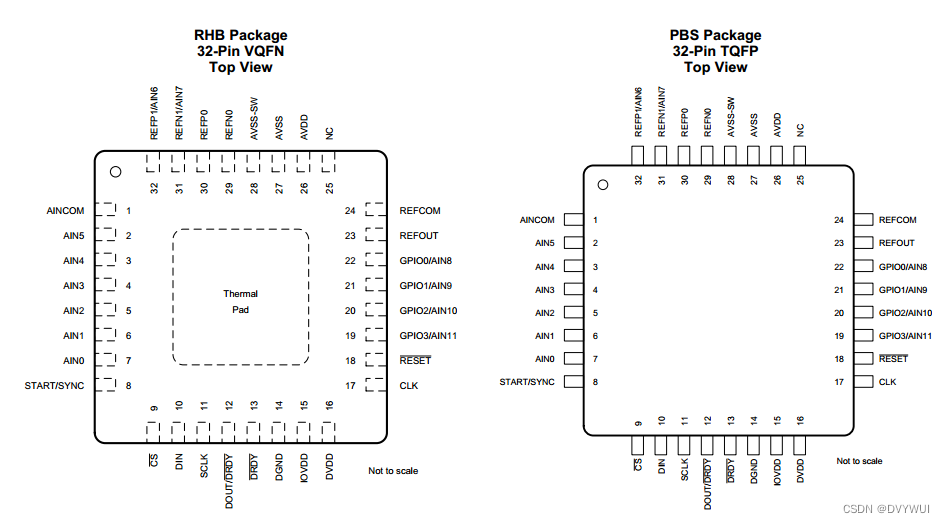
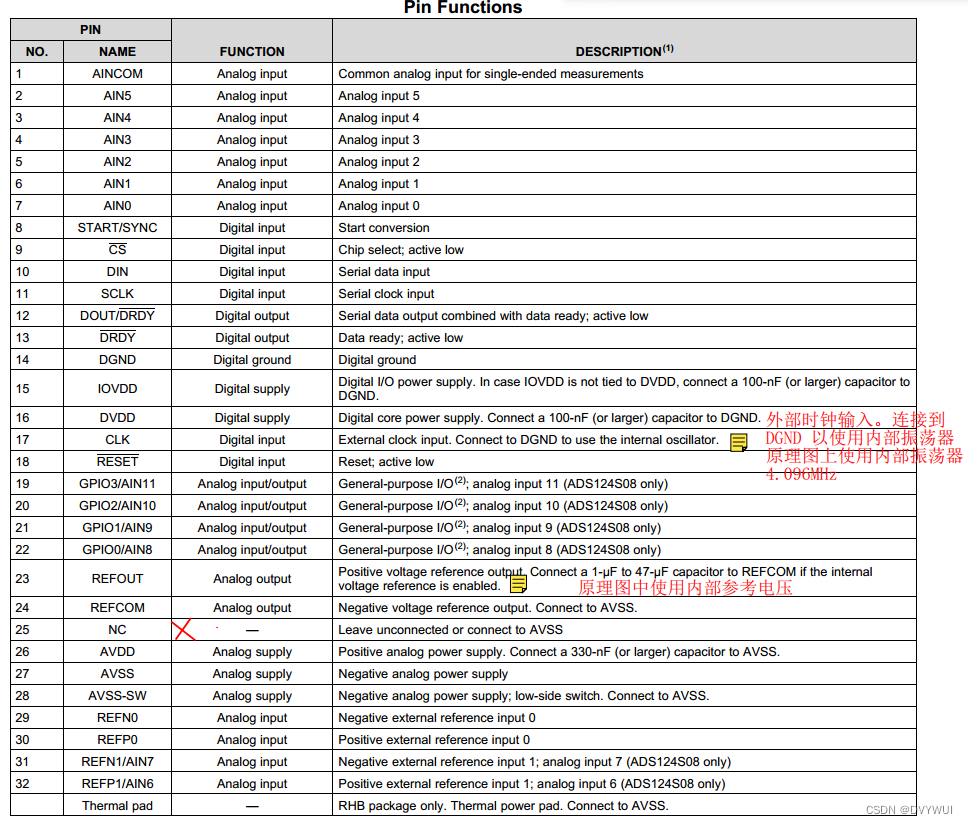
2. 引脚配置和功能
有两种封装形式
3.细节描述
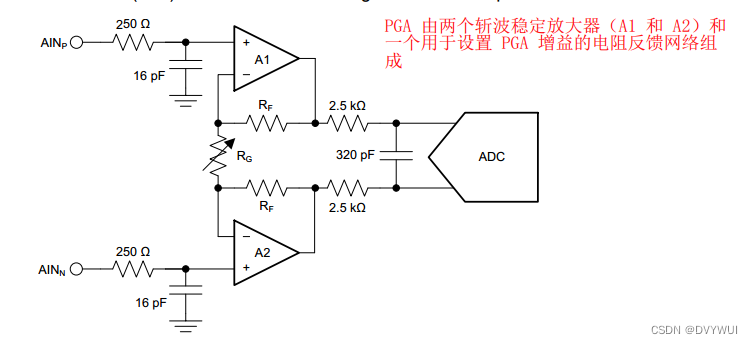
3.1 低噪声可编程增益放大器(PGA)
3.1.1 PGA原理图
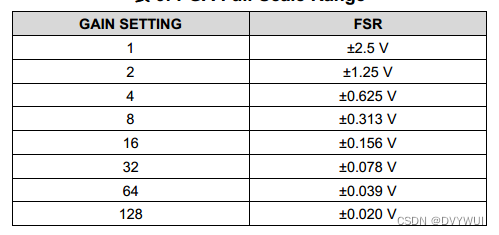
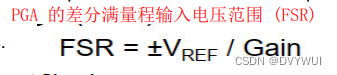
3.1.2 PGA 满量程范围
在使用内部参考电压2.5V的情况下,使能PGA,输入模拟电压和PGA增益的关系如下图
3.2 参考电压
参考电压的选择如下图,通过配置寄存器,寄存器配置会在后面讲
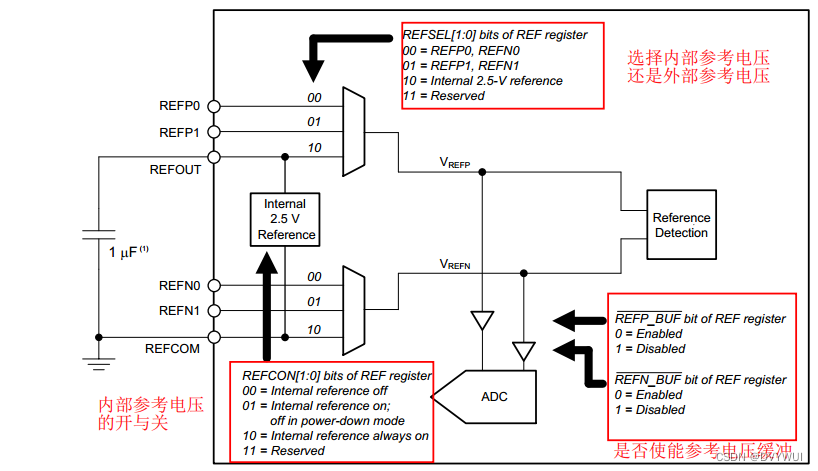
注意:选用内部参考电压需要在 REFOUT 和 REFCOM 之间连接一个1 μF 至 47 μF 范围内的电容器。较大的电容值有助于过滤更多噪声,但代价是更长的基准启动时间。并且当选择内部参考进行测量时,建议禁用参考缓冲器。
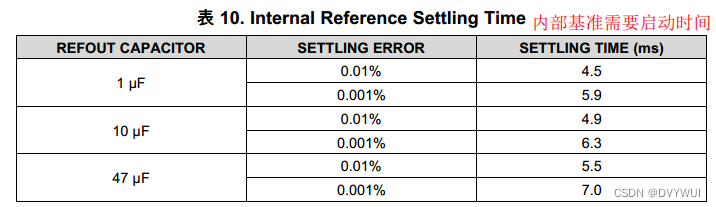
基准启动时间如下表
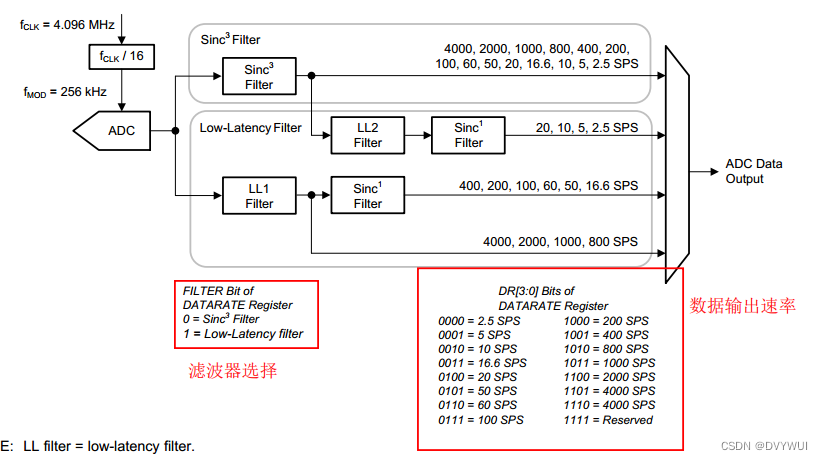
3.3 数字滤波器
该器件提供数字滤波器选项,用于对来自 delta-sigma 调制器的数字数据流进行滤波和抽取。数字滤波器的实现由数据速率和滤波器模式设置决定。如图显示了数字滤波器的实现。使用数据速率寄存器 (04h) 中的 FILTER 位在三阶 sinc 滤波器 (sinc3 ) 和低延迟滤波器(具有多个组件的低延迟滤波器)之间进行选择。
3.4 设备工作模式
包括掉电模式、待机模式和转换模式,如图 显示了不同工作模式的流程图以及设备如何从一种模式转换到另一种模式。
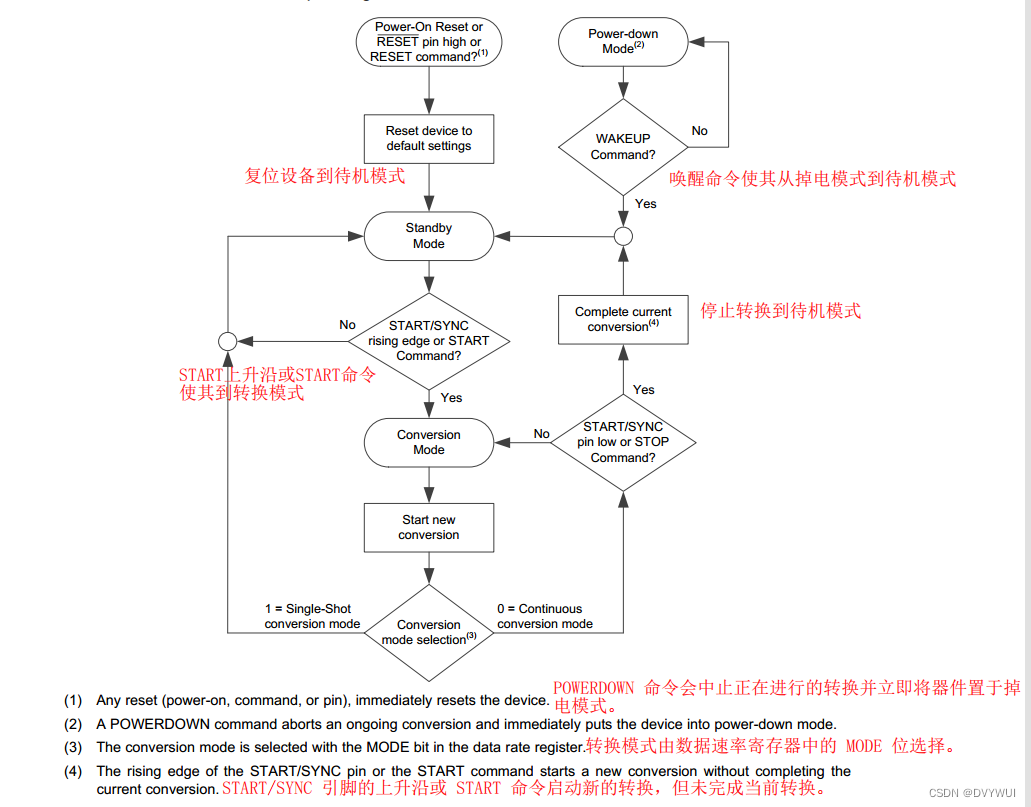
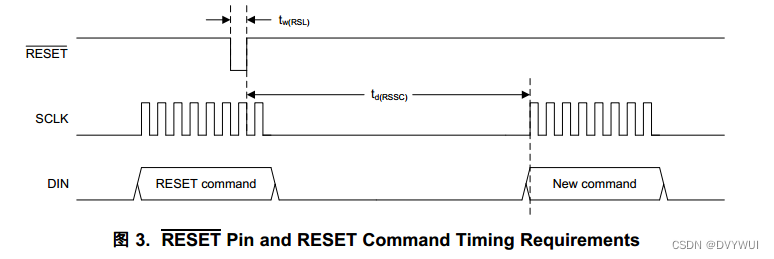
3.4.1 复位
通过将 RESET 引脚置于低电平至少 4·tCLK·周期(1ns),然后将引脚返回高电平来复位 ADC。
tCLK = 1 / fCLK即4.096MHz分之一
3.4.2 转换模式
ADS124S0x 提供两种转换模式:连续转换和单次转换模式。 连续转换模式会无限期转换,直到用户停止转换。单次转换模式在 START/SYNC 引脚变为高电平或发送 START 命令后执行一次转换。如图显示了如何使用 START/SYNC 引脚和 START 命令来控制 ADC 转换。
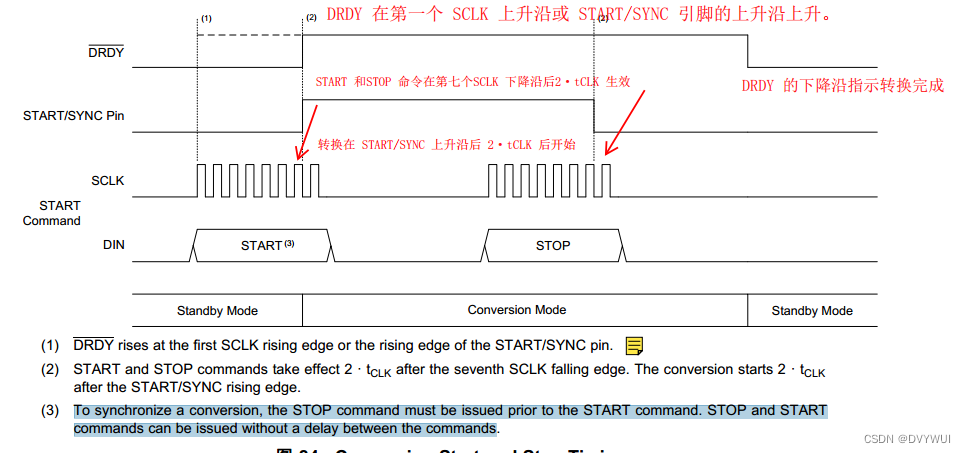
3.4.2.1 连续转换模式
通过在数据速率寄存器 (04h) 中将 MODE 位设置为 0,可将设备配置为连续转换模式。必须发送 START 命令或将 START/SYNC 引脚置于高电平,设备才能开始连续转换。使用命令控制设备时,请将 START/SYNC 引脚保持为低电平。将 START/SYNC 引脚置于低电平或发送 STOP 命令可在当前正在进行的转换完成后停止设备转换,DRDY 的下降沿表示转换完成。此后,设备进入待机模式。
3.4.2.2 单次转换模式
通过在数据速率寄存器 (04h) 中将 MODE 位设置为 1,可将器件配置为单次转换模式。必须发送 START 命令或将 START/SYNC 引脚置于高电平,器件才能启动单次转换。转换完成后,器件再次进入待机模式。要启动新转换,必须再次发送 START 命令或将 START/SYNC 引脚置于低电平然后再次置于高电平。
4 编程
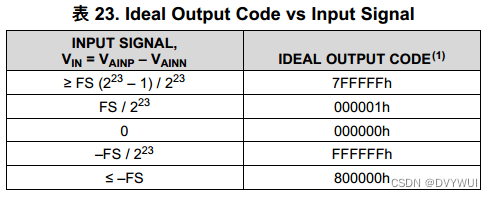
4.1 转换数据格式
输入差分电压与输出24位数据的对应关系如图
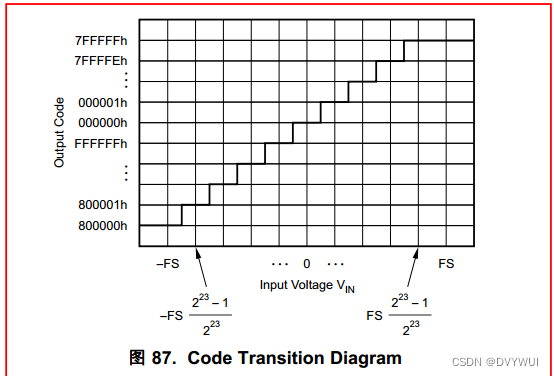
模拟输入信号到输出代码的映射如图
4.2 命令
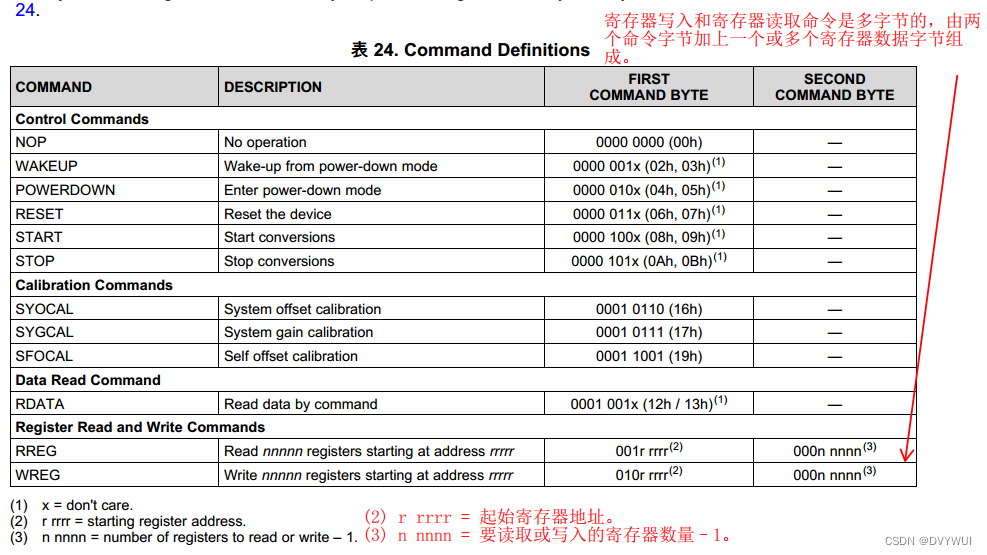
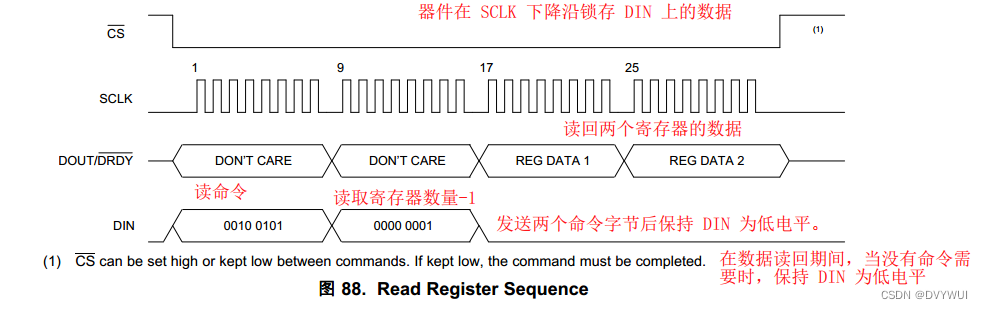
4.2.1 读寄存器
发送读取命令后,ADC 会以一个或多个寄存器数据字节(最高有效位优先)进行响应。 如果字节数超过最后一个寄存器地址,ADC 会开始输出零数据。
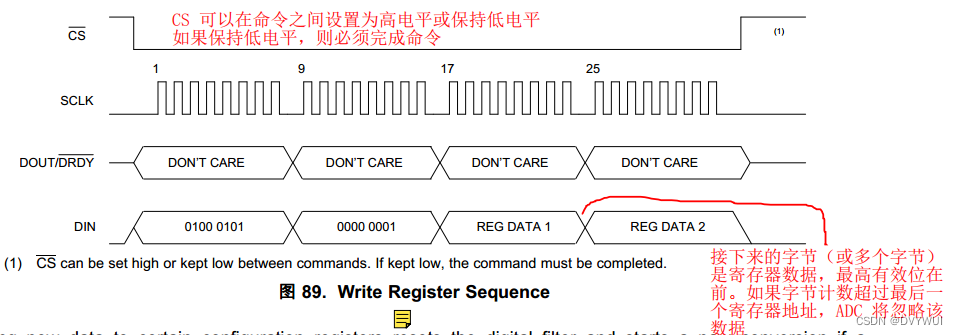
4.2.2 写寄存器
4.3 读取转换数据
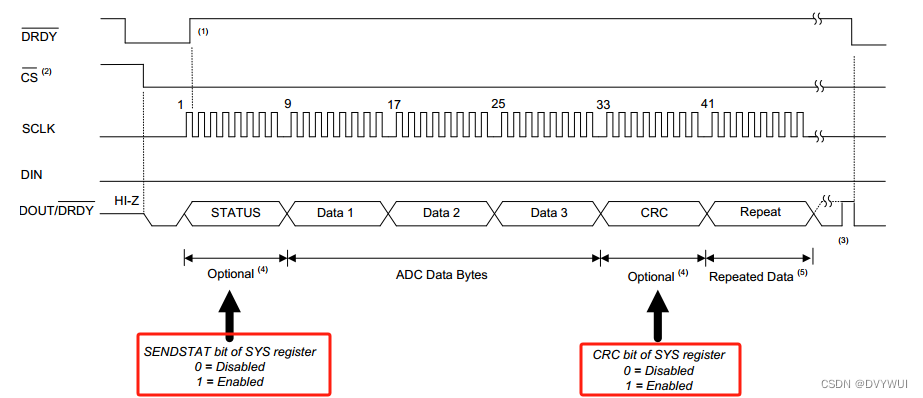
ADC 数据有两种读取方法:直接读取数据或通过命令读取数据。ADC 将新的转换数据写入输出移位寄存器和内部数据保持寄存器。数据可以从输出移位寄存器读取(直接模式),也可以从数据保持寄存器读取(命令模式)。从数据保持寄存器读取数据(命令模式)不需要将数据读回的开始与 DRDY 同步。
ADC 数据字段长度为 3、4 或 5 个字节。数据字段由一个可选的 STATUS 字节、三个字节的转换数据和一个可选的 CRC 字节组成。读取所有字节后,在继续发送 SCLK 时,数据字节序列(包括 STATUS 字节和 CRC 字节(如果选择))会重复。字节序列从第一个字节开始重复。为了帮助验证无错误通信,请在每个转换间隔内多次读取相同的数据或使用可选的 CRC 字节。
4.3.1 直接读取转换数据
首先判断DRDY是否为低电平,当DRDY为低电平表示数据准备好,然后拉低片选,接着进行SPI通信,读取转换数据,DRDY 在第一个 SCLK 下降沿返回高电平。
4.3.2 读命令读取转换数据
发送 RDATA 命令时,将从 ADC 数据保持寄存器中检索数据。可以使用轮询 DRDY 来确定 ADC 数据何时准备就绪。每次读取操作都必须发送 RDATA 命令。
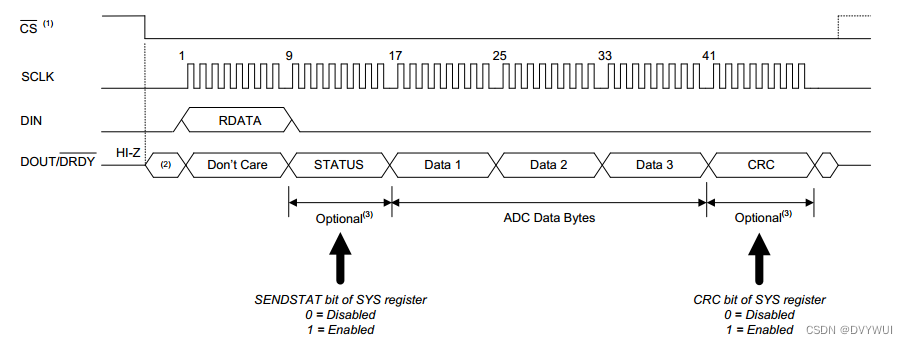
注:CS 可以处于低位。如果 CS 处于低位,则 DOUT/DRDY 和 DRDY 一起处于低位。
5. 寄存器映射
ADS124S0x 寄存器映射由 18 个 8 位寄存器组成。将新数据写入某些寄存器会导致
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 324
324





 到【灌水乐园】发言
到【灌水乐园】发言







