




2024年12月至2025年10月,从DRL与机器人到大模型与机器人,再到机器人操作与抓取的综述论文,建议新手小白、工业老兵可以全文食用~
202412 DRL与机器人:自主导航、灵巧操作、人机协作
这篇重点看DRL怎么帮机器人练出自主导航、灵巧操作、和人配合,总结了高效探索、多模态感知融合这些能促成技术突破的关键点,同时对长时间任务规划、开放环境里怎么适应这些尚未解决的问题进行阐述,下一步,可以看看提升样本效率、搞出更安全可靠的RL框架。
Deep Reinforcement Learning for Robotics: A Survey of Real-World Successes
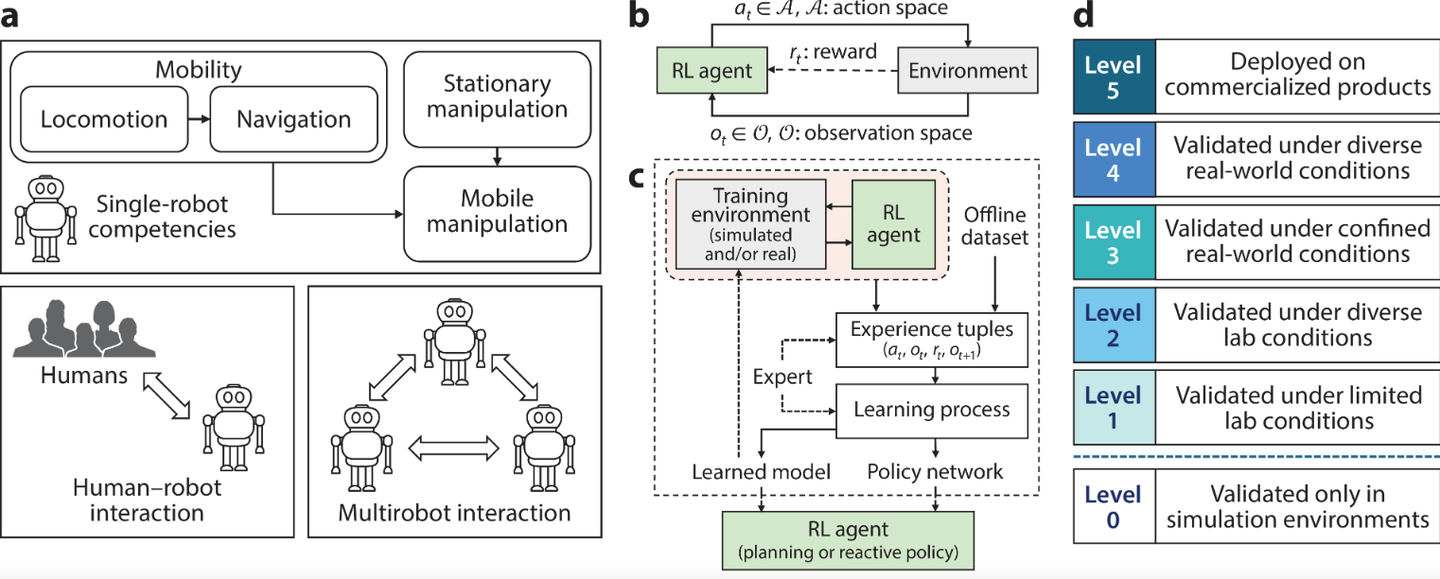
(a) 通过DRL习得的机器人能力,(b) 问题表述方式,(c) 解决方案设计方法,(d) 实际应用成功度。 来源:doi.org/10.1146/annurev-control-030323-022510
摘要:强化学习(RL),尤其是其与深度神经网络结合形成的深度强化学习(DRL),在机器人技术领域展现出巨大潜力。然而,机器人问题对RL提出了根本性挑战,包括物理世界交互的高成本与复杂性。
本文系统梳理了DRL在机器人领域的最新进展,重点评估其在实现关键机器人能力(如自主导航、灵巧操作、人机协作)中的实际成果。
通过分析成功案例,本文揭示了技术突破的核心因素(如高效探
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 692
692

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









