




 本文详细介绍如何在Ubuntu16.04环境下,通过配置两台机器(pc-master和pc-slave2)实现远程启动ROS节点的过程。文章覆盖了环境设置、需求分析、验证前提条件、配置步骤、启动流程及常见错误解决方法,特别针对'notfoundinknown_hosts'和'TypeError: 'NoneType' object is not callable'等问题提供了详细的解决方案。
本文详细介绍如何在Ubuntu16.04环境下,通过配置两台机器(pc-master和pc-slave2)实现远程启动ROS节点的过程。文章覆盖了环境设置、需求分析、验证前提条件、配置步骤、启动流程及常见错误解决方法,特别针对'notfoundinknown_hosts'和'TypeError: 'NoneType' object is not callable'等问题提供了详细的解决方案。
文章目录
远程启动ROS节点
#1 环境
Ubuntu 16.04
机器配置 :
pc-master 192.168.3.230 本地
pc-slave2 192.168.3.232 远程
前提条件:
- 可以在两台机器上实现单机的ROS发布和订阅
- 两台机器可以免密登录
#2 需求
- 在实际应用中, 不同的功能会放在不同的服务器上
- 需要订阅不同服务器上的topic
#3 验证前提条件
#3.1 验证免密登录
两台服务器可以相互免密登录
具体免密登录教程 : https://blog.youkuaiyun.com/Coxhuang/article/details/106971890
#3.2 验证单机ros发布订阅
这里以pc-slave2服务器为例(因为后面要远程启动的也是pc-slave2上的节点)
talker :

listener :
#4 开始
**接下来, 我们要在pc-master服务区上启动远程服务器pc-slave2的talker节点 **
#4.1 配置
#4.1.1 pc-master
sudo vim /etc/hosts
在/etc/hosts文件中添加一下内容 :
192.168.3.230 pc-master
192.168.3.232 pc-slave2
sudo vim ~/.bashrc
在~/.bashrc中添加一下内容 :
export ROS_IP="192.168.3.230"
export ROS_HOSTNAME=pc-master
export ROS_MASTER_URI=http://pc-master:11311
export ROSLAUNCH_SSH_UNKNOWN=1
#4.1.2 pc-slave2
sudo vim /etc/hosts
在/etc/hosts文件中添加一下内容 :
192.168.3.230 pc-master
192.168.3.232 pc-slave2
sudo vim ~/.bashrc
在~/.bashrc中添加一下内容 :
export ROS_HOSTNAME=pc-slave2
export ROS_MASTER_URI=http://pc-master:11311
export ROSLAUNCH_SSH_UNKNOWN=1
sudo vim /opt/ros/kinetic/trunk_evn.sh
新增trunk_evn.sh文件
#!/bin/sh
export ROS_IP=192.168.3.232
export ROS_HOSTNAME=pc-slave2
. /home/trunk/work/test/testworkspace/devel/setup.sh
exec "$@"
sudo chmod 777 trunk_evn.sh
#4.2 本地主机脚本
在本地pc-master的package中编写launch脚本
vim /home/trunk/work/test/testworkspace/src/testpackage/launch/test.launch
<launch>
<machine name="pc-slave2" address="192.168.3.232" user="trunk" env-loader="/opt/ros/kinetic/trunk_evn.sh"></machine>
<node machine="pc-slave2" name="talker" pkg="testpackage" type="talker.py" output="screen" ></node>
</launch>
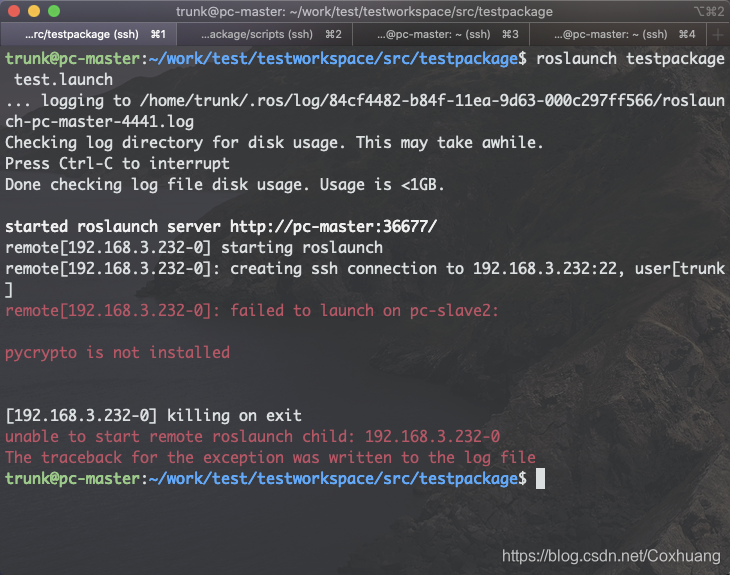
#4.3 启动
roslaunch testpackage test.launch
#5 报错
#5.1 not found in known_hosts
... logging to /home/trunk/.ros/log/84cf4482-b84f-11ea-9d63-000c297ff566/roslaunch-pc-master-3868.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://pc-master:32881/
remote[192.168.3.232-0] starting roslaunch
remote[192.168.3.232-0]: creating ssh connection to 192.168.3.232:22, user[trunk]
/usr/lib/python2.7/dist-packages/Crypto/Cipher/blockalgo.py:141: FutureWarning: CTR mode needs counter parameter, not IV
self._cipher = factory.new(key, *args, **kwargs)
remote[192.168.3.232-0]: failed to launch on pc-slave2:
Unable to establish ssh connection to [trunk@192.168.3.232:22]: Server u'192.168.3.232' not found in known_hosts
解决思路 :
- 看日志

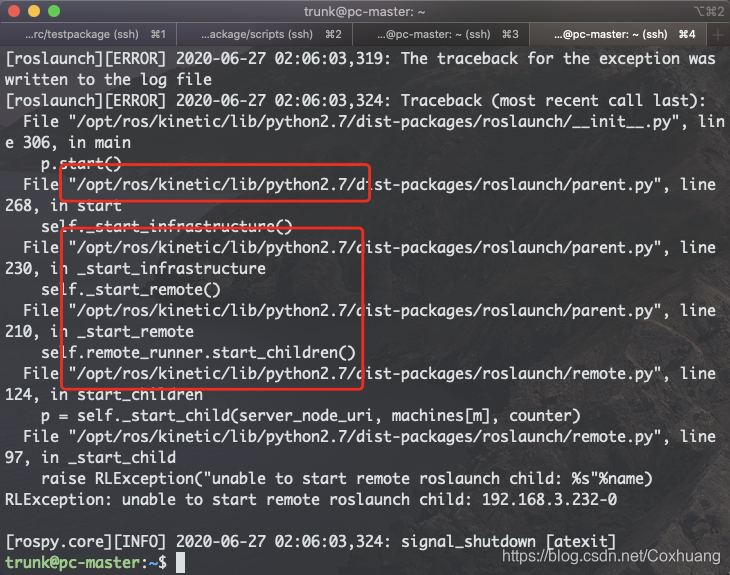
根据日志报错的提示来修改python底层源码,没有效果,日志显示, ros依然是运行在python2.7上,试着将ros运行在Python3上
- 把系统默认Python替换成Python3
sudo rm -rf /usr/bin/python
sudo ln -s /usr/bin/python3 /usr/bin/python
- 安装ros的编译基础软件包
sudo apt-get install python3-rosdep python3-rosinstall-generator python3-wstool python3-rosinstall build-essential
sudo pip3 install catkin_pkg
- 安装软件包依赖
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
sudo apt-get install libtbb-dev python3-pyqt5
sudo pip3 install empy numpy defusedxml netifaces
# 修复 16.04 libboost_python3找不到的问题
sudo ln -s /usr/lib/x86_64-linux-gnu/libboost_python-py35.so /usr/lib/x86_64-linux-gnu/libboost_python3.so
- 完美解决
#5.2 TypeError: ‘NoneType’ object is not callable
修改Python底层代码


















 2782
2782

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









