




 本文详细介绍了在Ubuntu16.04系统上安装ROS Kinetic的步骤,包括配置镜像源、设置key、更新package、安装完整版ROS Kinetic以及配置环境变量等关键操作。
本文详细介绍了在Ubuntu16.04系统上安装ROS Kinetic的步骤,包括配置镜像源、设置key、更新package、安装完整版ROS Kinetic以及配置环境变量等关键操作。
Ubuntu16.04 安装ROS
#1 环境
Ubuntu 16.04
#2 安装
- 配置ROS镜像源
二选一
# 官方镜像
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 中科大镜像
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 设置key(公钥已更新)
二选一
# 官方
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 中科大
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
- 更新package
sudo apt-get update
- 安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full
漫长等待…
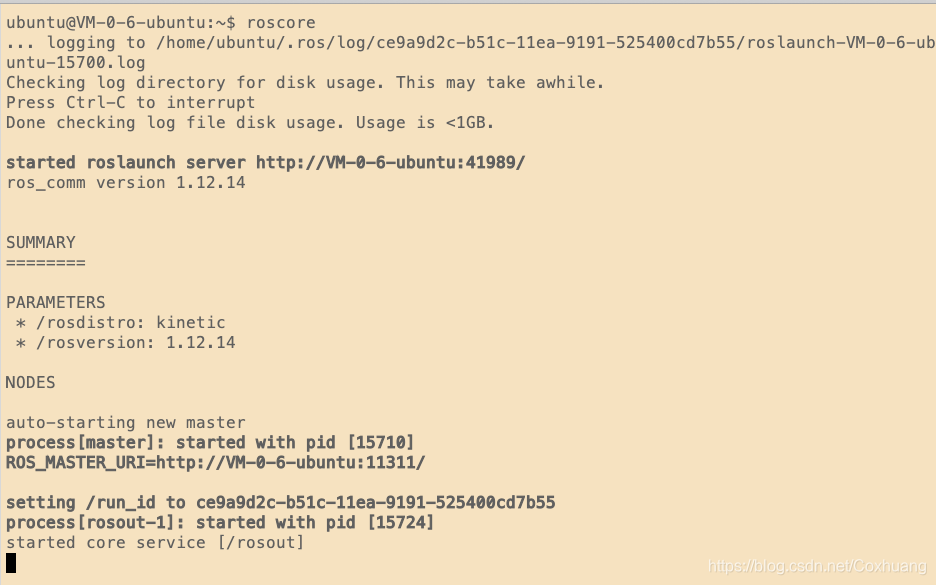
- 配置环境变量
source /opt/ros/kinetic/setup.bash
不配置环境变量, 会报以下错误 :
The program 'roscore' is currently not installed. You can install it by typing:
sudo apt install python-roslaunch
- 下载roslaunch
sudo apt install python-roslaunch

















 2117
2117

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









