



作者 | 大壮 来源 | 智驾极客
原文链接:https://zhuanlan.zhihu.com/p/28803001646
点击下方卡片,关注“自动驾驶之心”公众号
>>点击进入→自动驾驶之心『端到端自动驾驶』技术交流群
本文只做学术分享,如有侵权,联系删文
0
1
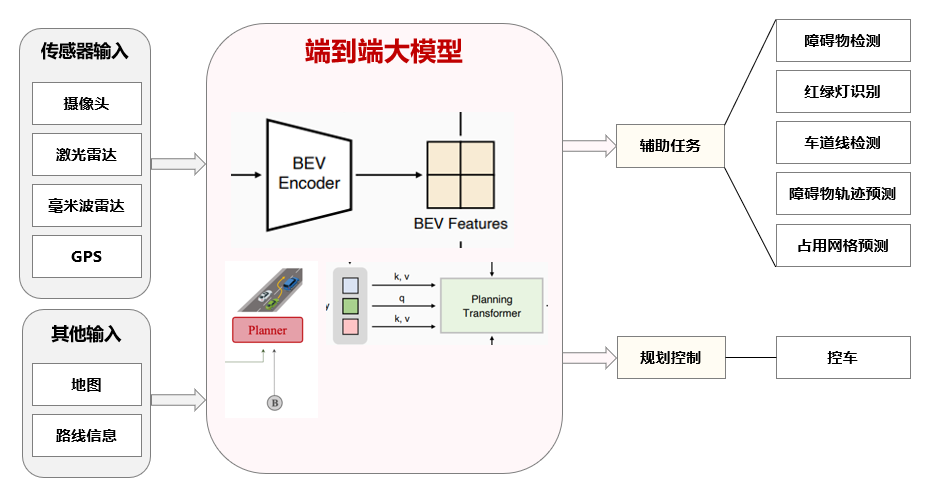
从传感器数据到控制策略的端到端方法

端到端自动驾驶基本流程:
(1)子任务模型被更大规模的神经网络模型取代,最终即为端到端神经网络模型;
(2)由数据驱动的方式来解决长尾问题,取代rule-based的结构。
优点:
(1)直接输出控车指令,避免信息损失;
(2)具备零样本学习能力,更好解决OOD问题;
(3)数据驱动方式解决自动驾驶长尾问题;
(4)避免上下游模块误差的过度传导;
(5)模型集成统一,提升计算效率。
02
完全端到端是怎么做的
评估指标
●开环指标
○L2误差
○碰撞率
●闭环仿真
○路线完成率(RC)路线完成的百分比
○违规分数(IS)衡量触发的违规行为
○驾驶分数(DS)表示驾驶进度和安全性
03
端到端的一些主流方法
3.1 UniAD算法详解
算法动机
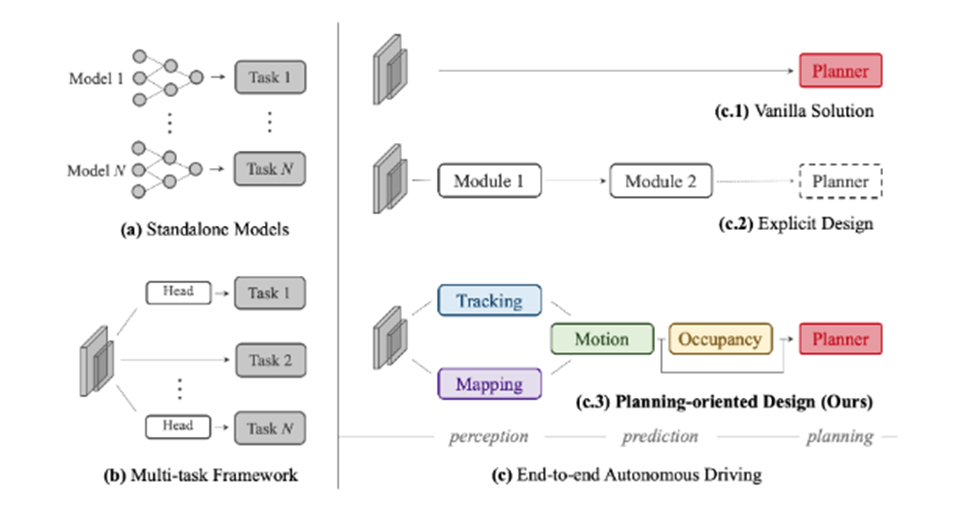
●跨模块信息丢失、错误积累和特征misalignment
●负向传输
●安全保障和可解释性方面
●考虑模块较少
开创性思路
●第一项全面研究自动驾驶领域包括感知、预测和规划在内的多种任务的联合合作的工作
●以查询方式链接各模块的灵活设计
●一种以决策为导向的端到端框架
主体结构
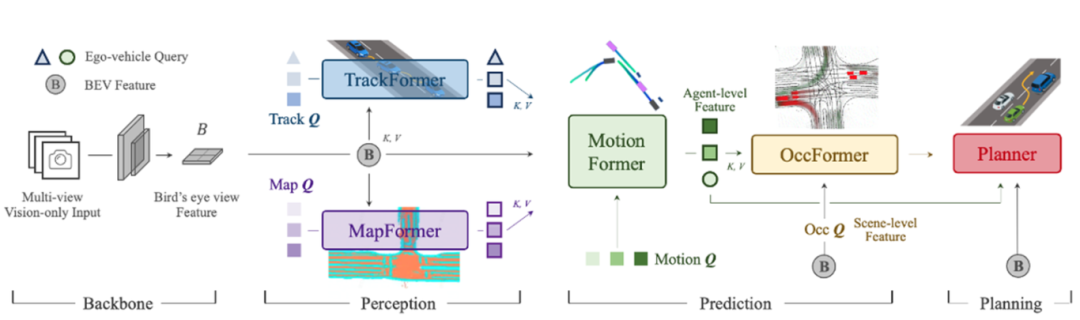
该模型包括特征提取,特征转换,感知模块(目标检测+多目标跟踪+建图部分,TrackFormer、MapFormer),预测模块(MotionFormer、OccFormer),规划模块(指令导航、Occ矫正轨迹)
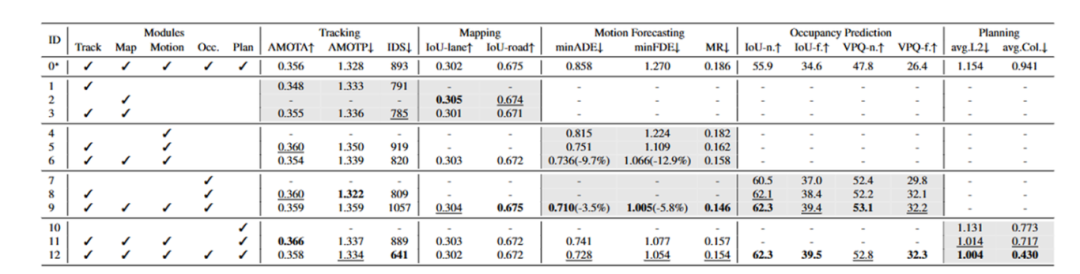
性能对比
消融实验证明各个模块都是不可或缺的,然后再去对比单个模块的性能。各个模块的对比这里不再展开。
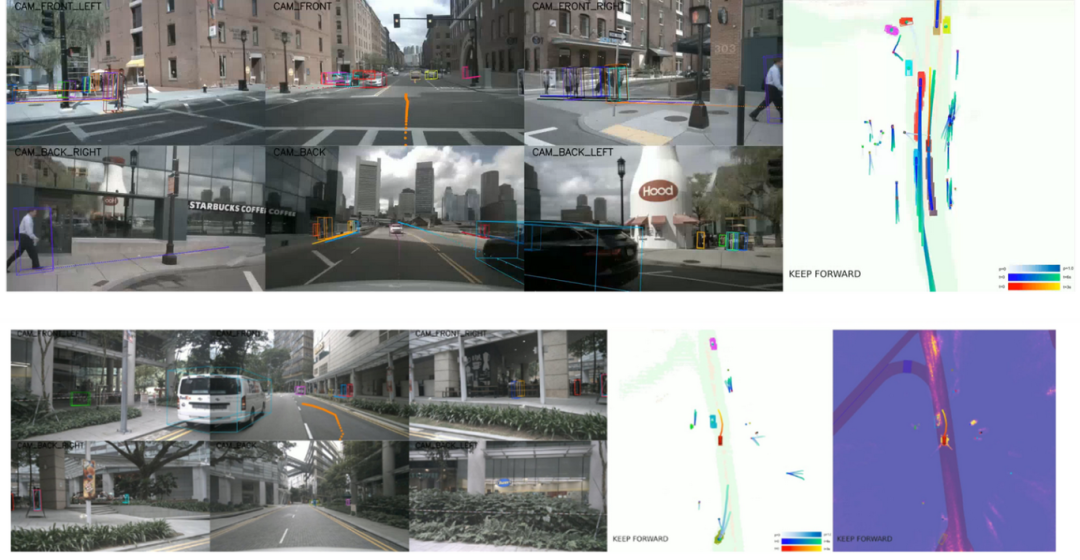
3.2 VAD算法详解
算法动机
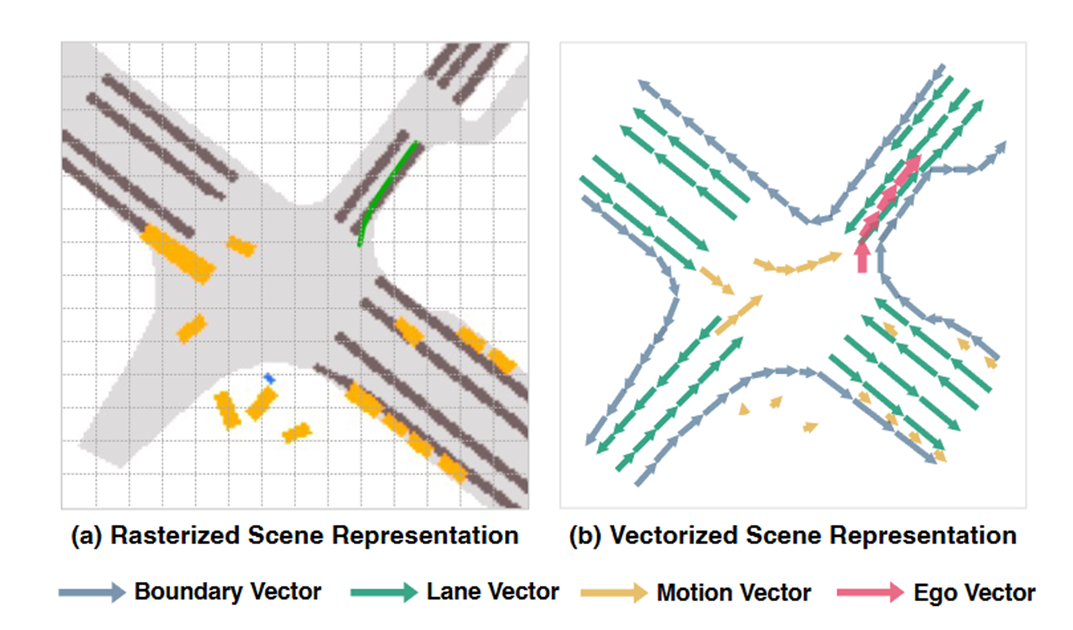
●栅格化表示计算量大,并且缺少关键的实例级结构信息
●矢量化表示,计算方面效率高
主体结构
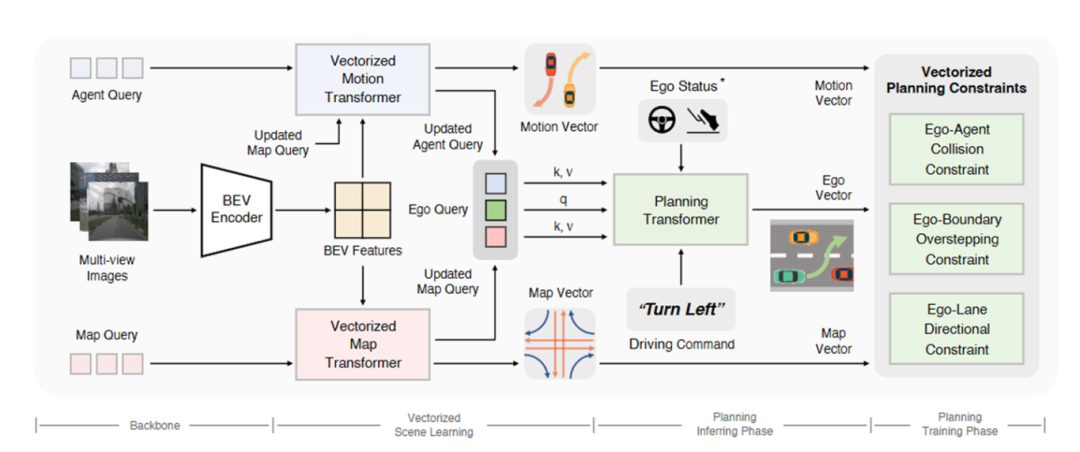
该模型包括特征提取、特征转换、矢量化场景学习、规划模块。
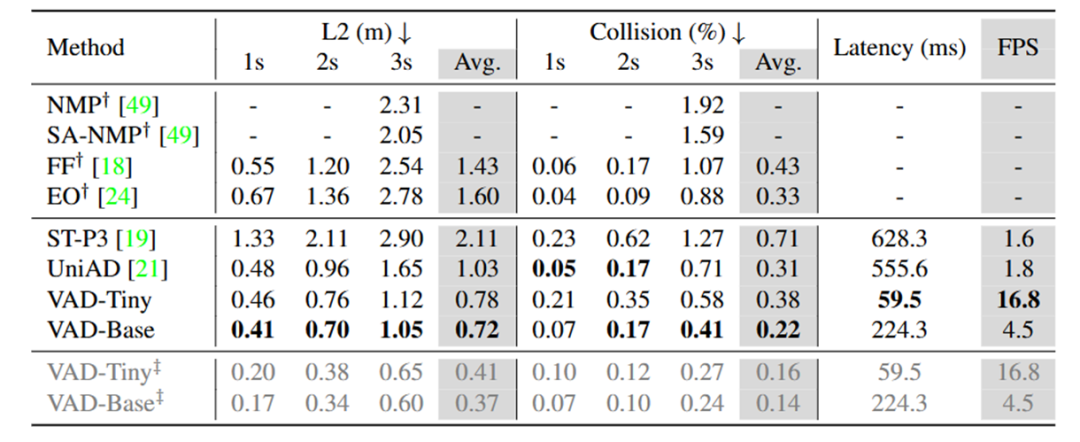
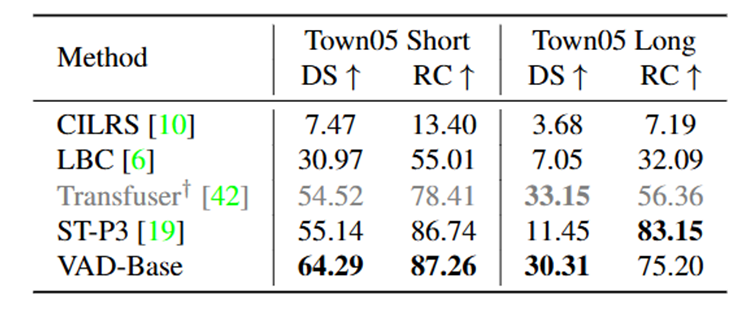
性能对比
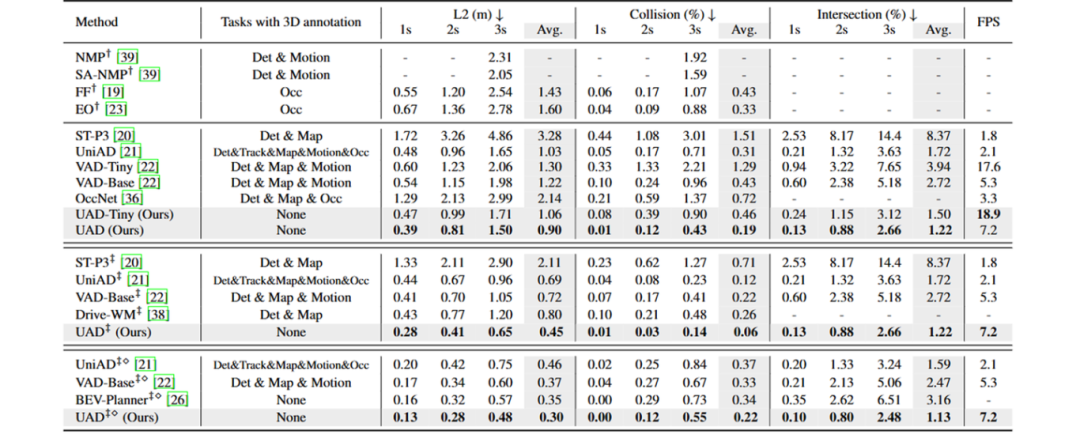
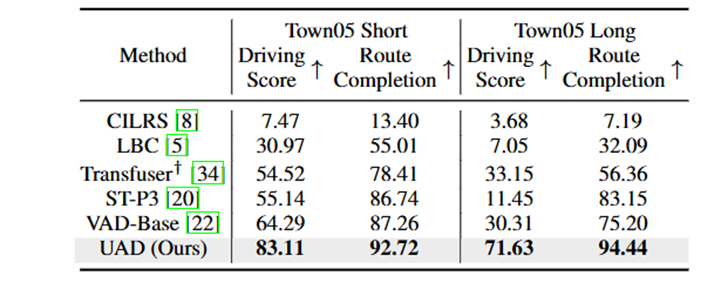
3.3 UAD算法详解
算法动机
●现存方法的标注和计算开销过大,所以本篇没有人工标注的需求
●感知模块的标注不是提升规划性能的关键,扩大数据量才是关键。只对数据量扩大但不增加标注成本。
开创性思路
●无监督代理任务
●自监督方向感知策略
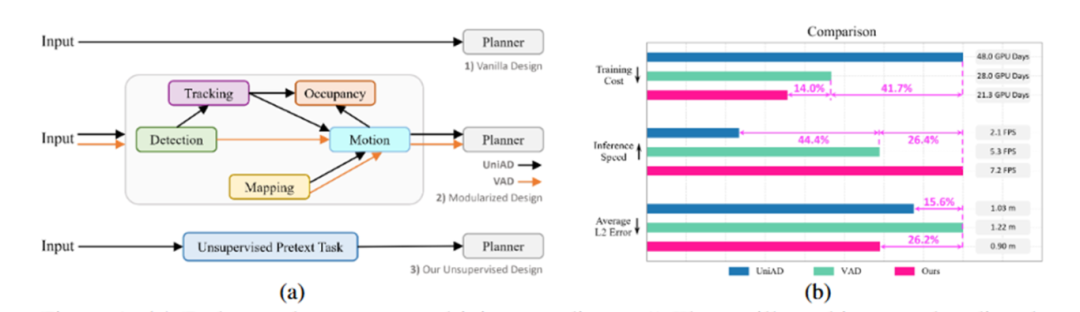
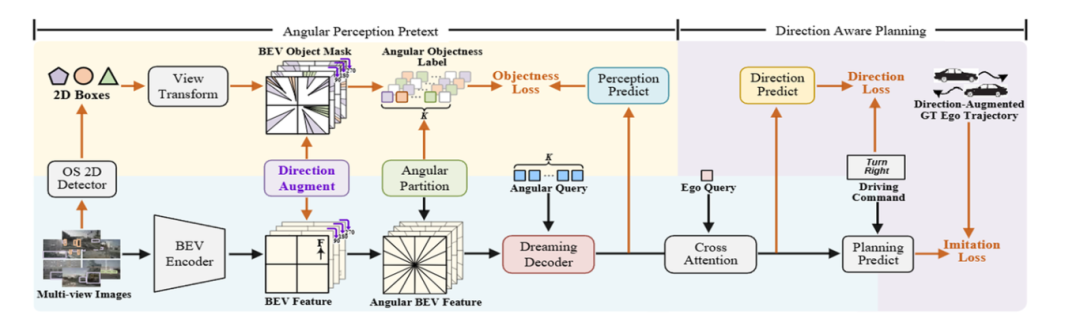
主体结构
整体结构包括两部分的内容,分别是
●无监督的代理任务
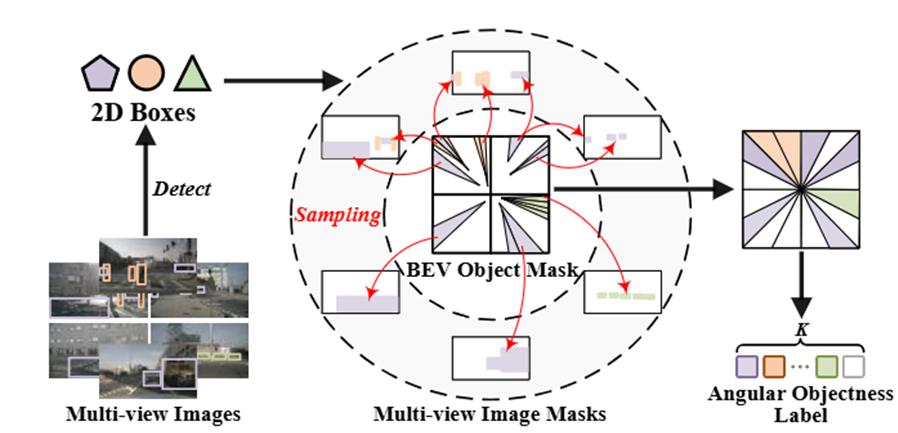
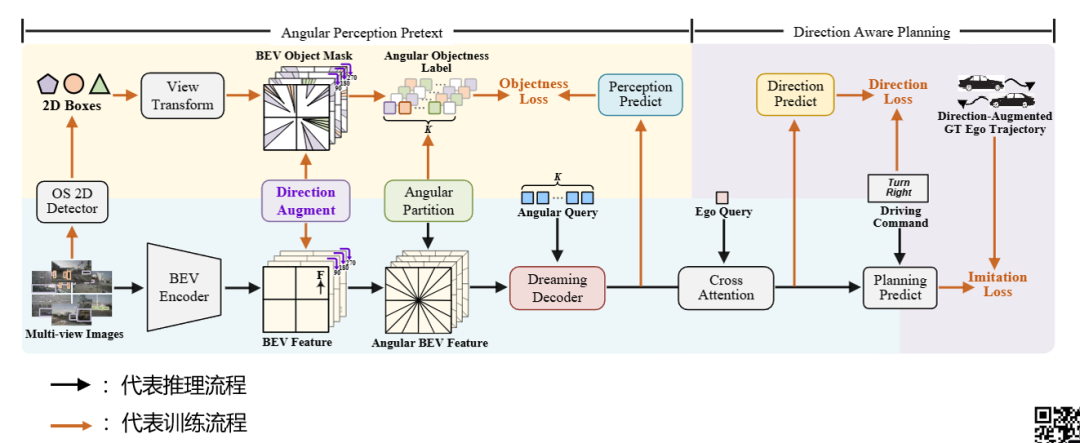
输入是一个环视的图像,通过GroundingDINO(开集检测器,在训练集中10个类别的数据,但是验证集中有多出来的其他类别也要要求能检测出来),然后得到BEV特征,经过Dreaming Decoder得到预测结果与刚才说获取的标签去计算一个loss(二分类交叉loss)
用于对物体预测的Dreaming decoder的整体结构是:初始化K个角度的Query,BEV特征被分成了K个区域跟Query一一对应,经过GRU模块(用t-1时刻的Query和当前时刻t的特征F去计算当前时刻t的Query),用t时刻的特征和t时刻的Query做一个CrossAttention得到下一时刻的特征。即自回归的一种方式。Query之间对平均值和方差进行一个DreamingLoss,让其分布尽量相似。
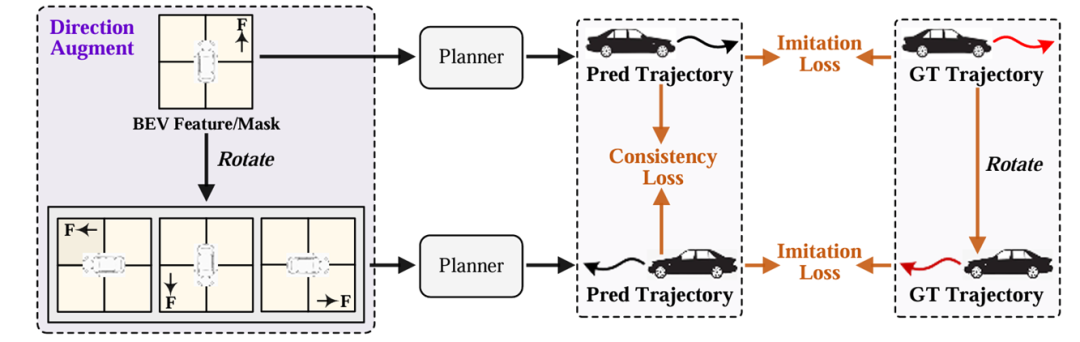
●利用方向感知的规划模块
该模块包括三部分的内容
(1)PlanningHead规划头(通过模仿学习来计算未来轨迹,对BEV特征进行旋转,过规划头得到响应的预测轨迹,然后GT也要旋转,两者得到一个模仿学习的loss。)
(2)Directional Augmentation方向增强(先对轨迹沿着车辆行驶方向划分为直行、左转、右转,然后通过这个预测头做一个三分类)
(3)Directional Consistency方向一致性(旋转后的特征得到的轨迹再旋转回去之后,跟之前的对比得到loss。)
性能对比
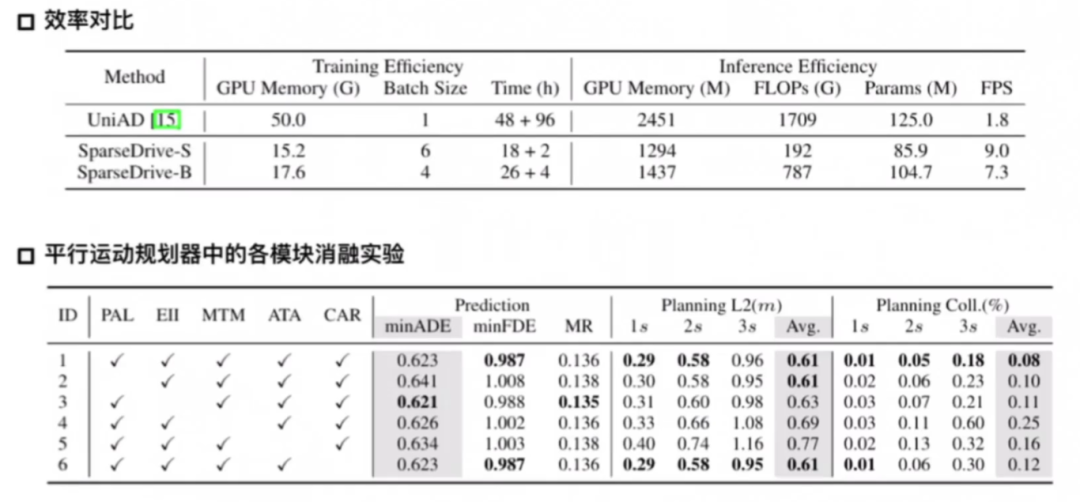
3.4 SparseDrive算法详解
算法动机
●认为传统方法中BEV特征计算成本高
●忽略了自车对周围代理的影响
●场景信息是在agent周围提取,忽略了自车
●运动预测和规划都是多模态问题,应该输出多种轨迹
开创性思路
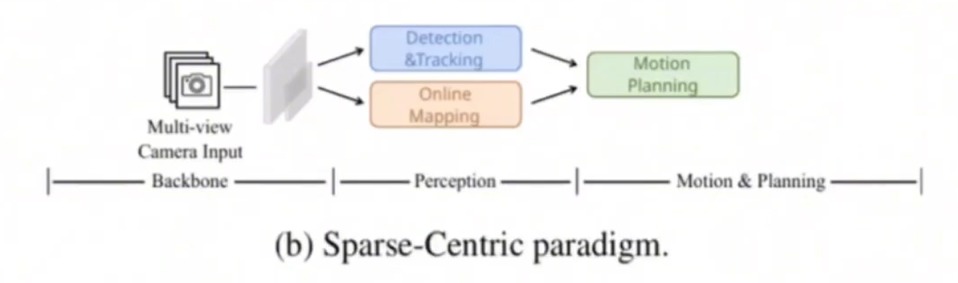
●探索了端到端自动驾驶的稀疏场景表示,并提出了一种以稀疏为中心的范式
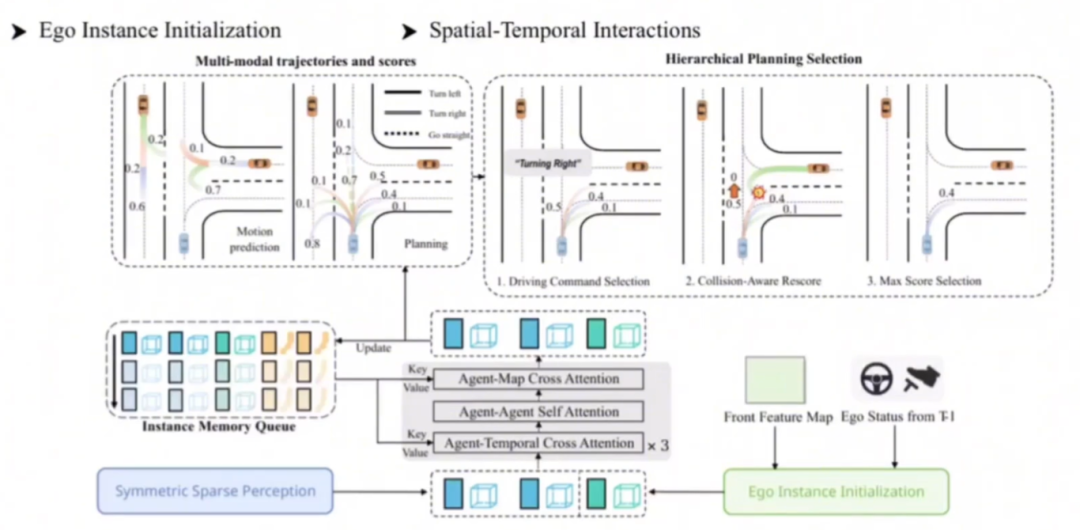
●修改了运动预测和规划之间的巨大相似性,提出了一种分层规划选择策略
主体结构
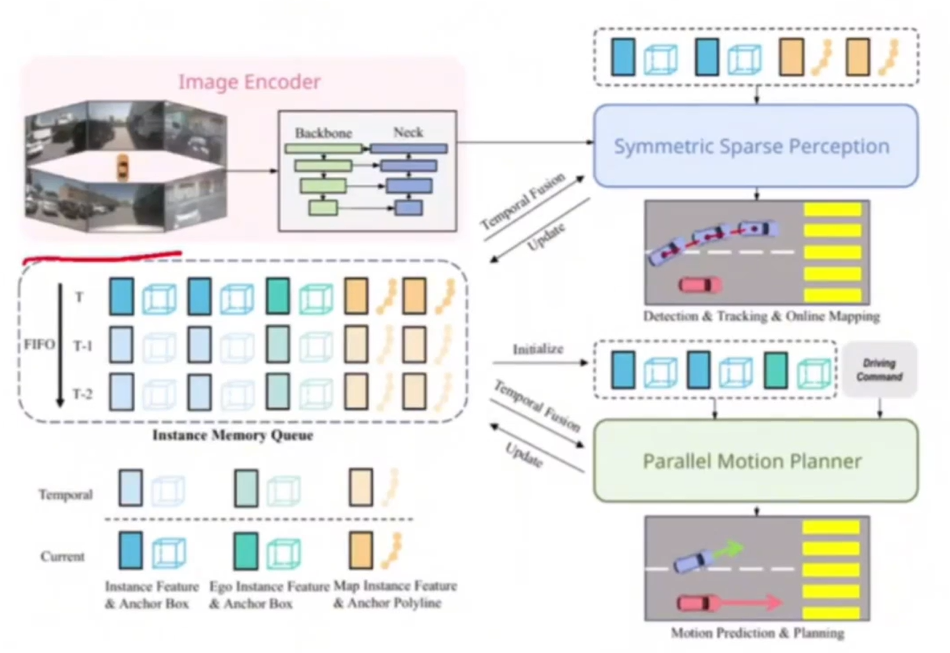
输入环视的6幅图像,输出是其他agent的预测和规划结果。
中途处理过程包括:特征提取、对称稀疏感知、平行运动规划三大模块。
在对称稀疏感知模块中,主要包含:稀疏检测、稀疏跟踪、稀疏在线建图任务,我们来具体看一下。
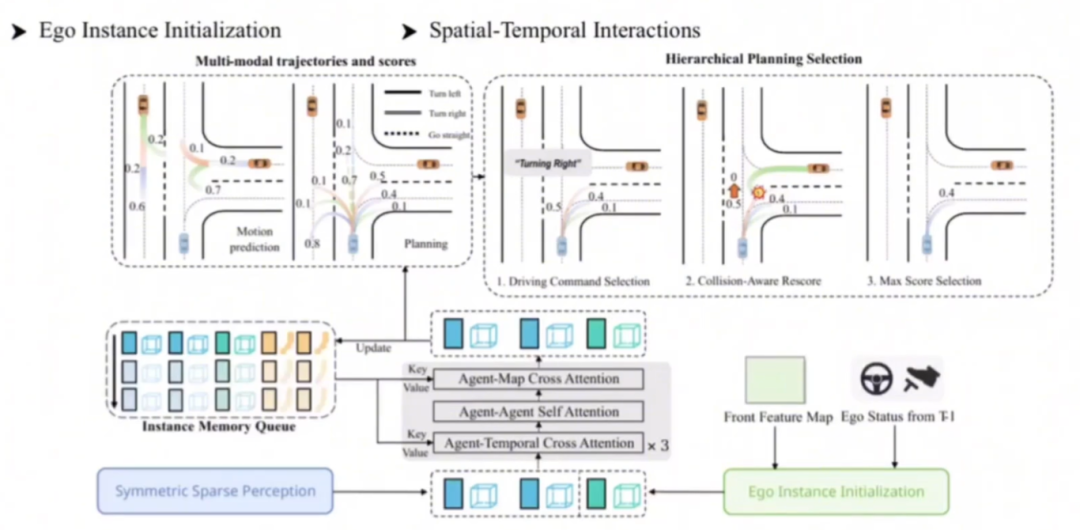
在平行运动规划器模块中:作者认为其他agent的轨迹预测和自车的轨迹预测应该是一个任务,并且是互相影响的。
性能对比
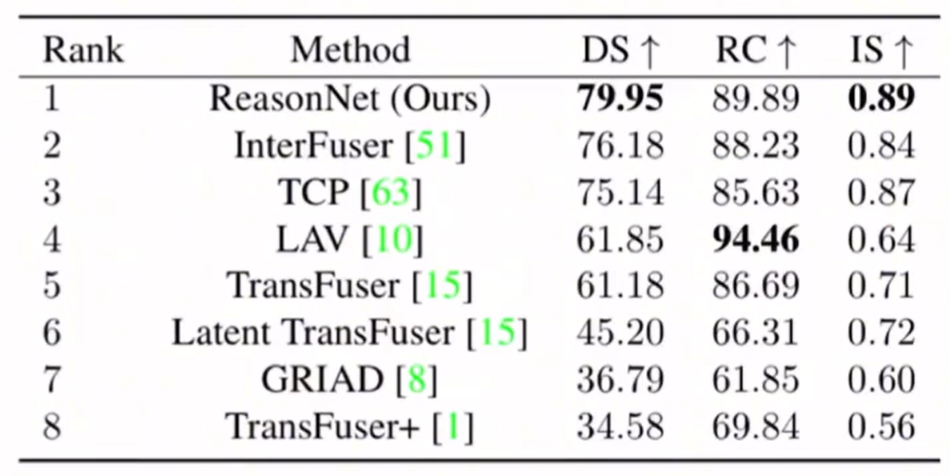
3.5 ReasonNet算法详解
这是一个时序+多模态的方案,这篇论文对一些特殊的场景进行了考虑。
算法动机
●应该对驾驶场景的未来发展做出高保真的预测;
●处理长尾分布中罕见不利事件,遮挡区域中未被发现但相关的物体。
开创性思路
●提出一种新型的时间和全局推理网络,增加历史的场景推理,提高全局情景的感知性能;
●提出一种新基准,由城市驾驶中各种遮挡场景所组成,用于系统性地评估遮挡事件。
主体结构
这篇文章是多模态的,所以其输入是图像输入和雷达点云的输入所组成的,输出是waypoints。
主体结构分为三个模块:
●感知模块:从Lidar和RGB数据中提取BEV特征;
●时间推理模块:处理时间信息并维护存储历史特征的存储库;S用于计算存在Memory Bank中的历史特征和当前特征的相似度
●全局推理模块:捕获物体与环境之间的交互关系,以检测不利事件(如遮挡)并提高感知性能。
性能对比
基于本文提出的新的benchmark叫做DOS benchmark:四种场景分别包含25种不同的情况,包括车辆和行人的遮挡,有间歇性遮挡和持续遮挡但有交互线索。
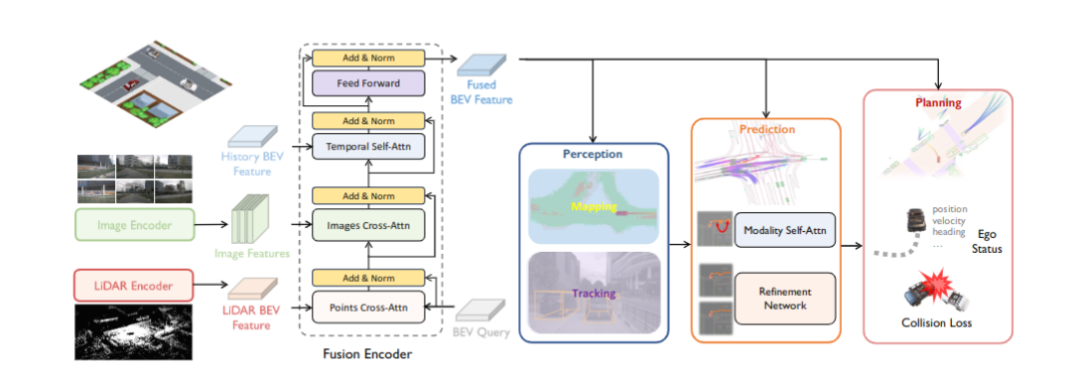
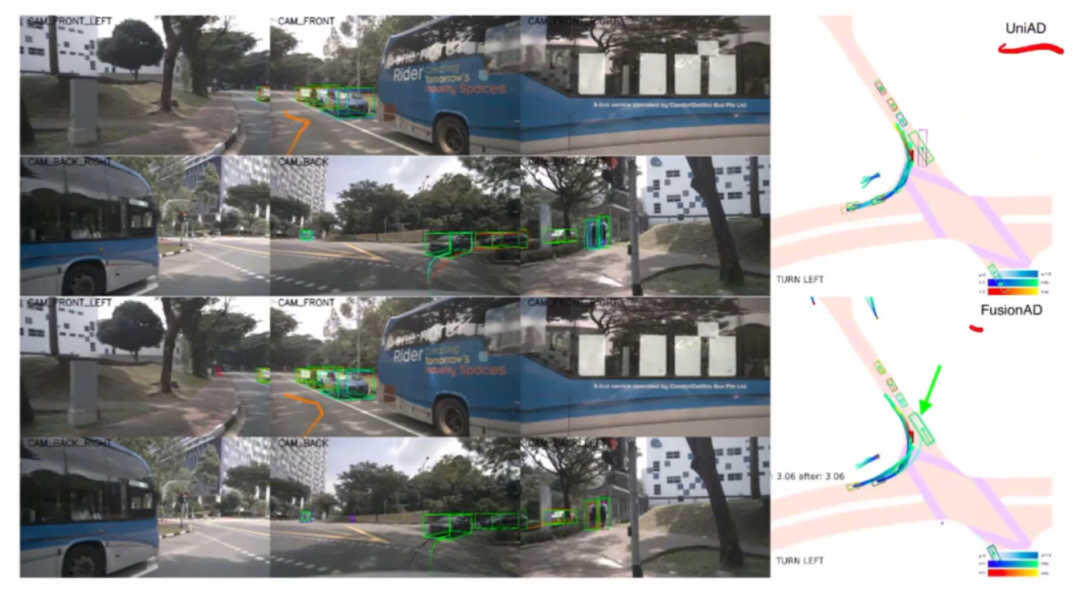
3.6 FusionAD算法详解
这是一篇多模态的方案,是在UniAD的基础上加入了点云数据,改造成了多模态的方案。
算法动机
●传统的模块化方法没办法支持梯度反传,会造成信息的丢失。
●UniAD只支持图像输入,不支持激光雷达信息。
开创性思路
●第一个统一的基于BEV多模态、多任务的端到端学习框架,重点关注自动驾驶的预测和规划任务;
●探索融合特征增强预测和规划任务,提出一个融合辅助模态感知预测和状态感知规划模块,称为FMSPnP。
主体结构
该模型的主体结构包括特征融合模块、预测模块、规划模块。
性能对比
3.7 Hydra-MDP算法详解
CVPR 2024端到端自动驾驶挑战赛冠军+多模态方案,具备多个目标的多头蒸馏。
算法动机
本文作者提出的新的范式,就是规划模块是多模的输出,同时,目标也是多样性的,即不仅是GT的轨迹也同时引入了更多的正样本,由不同的专家给出的。此外,将后处理的模块变成了可微分的用于训练的神经网络的模块,从而消除了第二种范式中由于不可微分而带来的信息损失的情况。
开创性思路
●引入了更多的正样本,由不同专家给出;
●感知真值引入规划模块用于训练。
主体结构
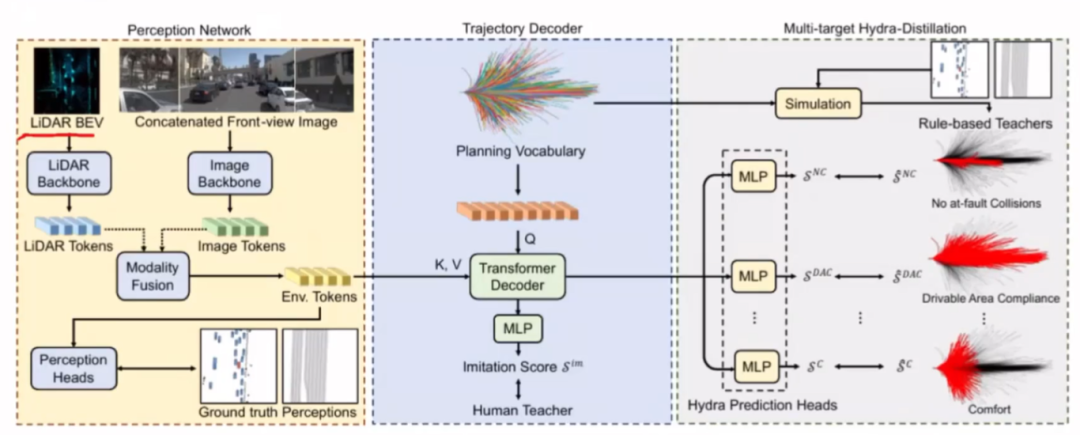
第一部分是感知的信息处理融合和提取,第二个模块是用前面得到的特征去解码出轨迹,最后一个模块是多目标学习范式部分。
感知模块用的Transfuser的baseline
轨迹解码器:计算不同的预测轨迹与GT轨迹的距离,这里用的是L2,用这个距离做softmax,然后去产生不同轨迹的得分情况,从而去监督得分。
多目标多头蒸馏模块:我们看到轨迹模仿学习之后的轨迹还过了其他的MLP,这就是其他头,它的目标也是不一样的,第一个是跟碰撞相关的,第二个是跟行驶区域相关的,第三个是跟舒适度相关的,也就是说不同的评判指标都有一个teacher,之前的模仿学习就是人类的teacher,那么这些teacher是怎么来的呢?怎么通过这些teacher来蒸馏的呢?我们看下作者是怎么去做的,首先我们得到规划词表Planning Vocabulary之后,对规划词表进行了一个模拟(用感知模块的GT进行训练的),有了这两个之后,我们就能算出来这些评估指标,从而计算每条轨迹的得分。总结一下就是对整个训练数据集的规划词汇进行离线模拟,在训练过程中引入每条轨迹的模拟分数的监督。
性能对比

自动驾驶之心
论文辅导来啦

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 1495
1495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









