



好消息:2025年硕博扩招,人工智能等工科招生增幅普遍超过30%,成功在这个时候申上了硕/博士。
坏消息:大厂面试人手2篇A会,未来就业不确定,毕业时间不确定,论文发表不确定,导师意见不确定,实验结果不确定,竞争压力与就业压力与日俱增,时代的黑利也算是吃上了...
以上所有问题的根源说到底就是:
自身实力不够过硬
导师精力资源没有倾斜给到
话又说回来,大导精力有限,对所带学生很难平均照顾,只能深入指导他最看重的几个学生。于是问题又绕回了自身实力这一块,如何打破循环,快速发一篇高质量论文?
跟随大佬套路,一年两篇论文不是问题!自动驾驶之心服务大家的论文辅导正式推出了,联手全球QS排名前100的老师,严格要求交付过程,不盲目招生,以诚信服务学生为主,近3年辅导学员超过 400+名,中稿率高达96%。
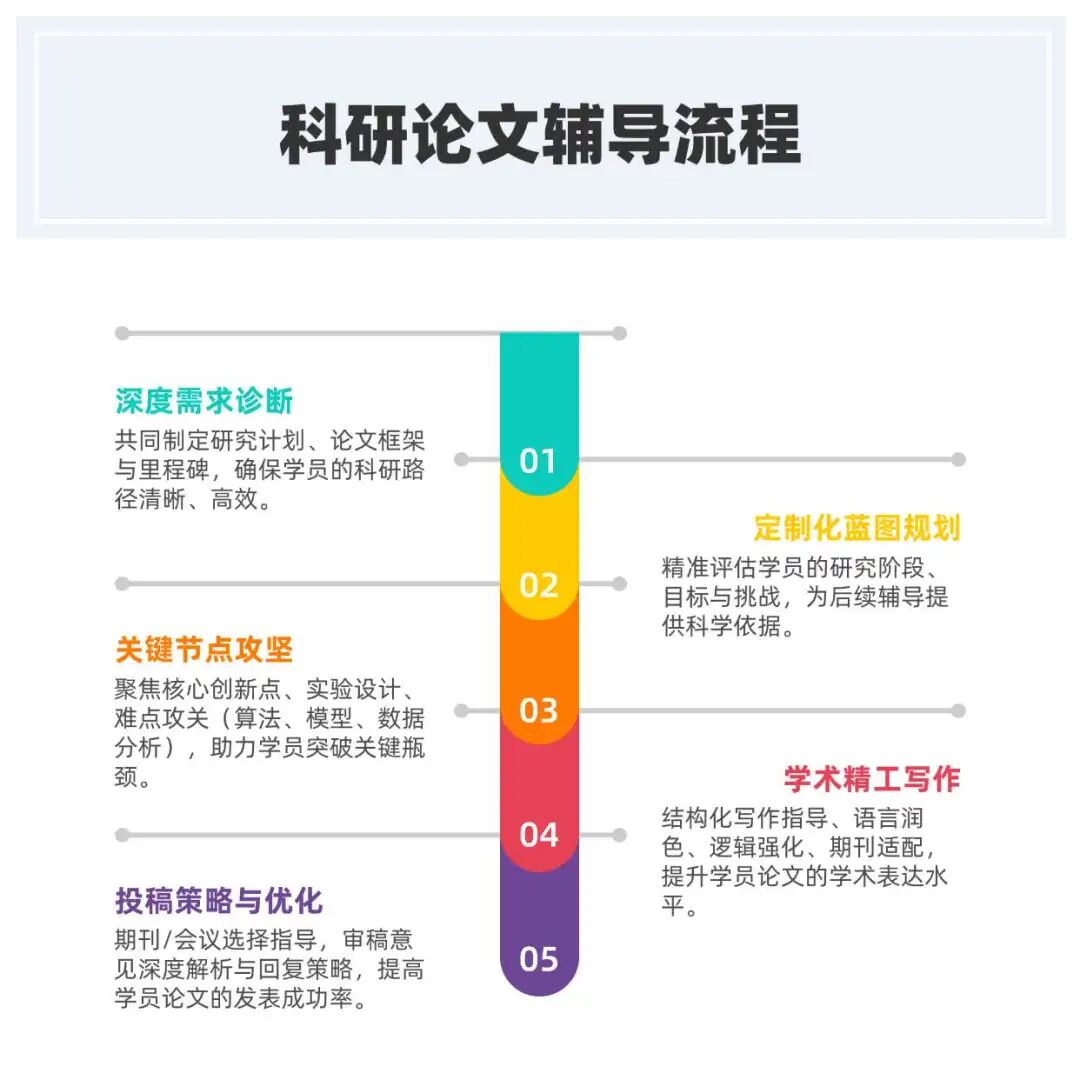
辅导全流程
明确需求与方向 → 精准选题与文献综述 → 创新方法设计与实验规划 → 严谨实验与深度分析 → 规范写作与结构优化 → 多轮修改与反馈迭代 → 投稿选则与意见回复。
签订正规协议,保障你的研究想法、论文内容及个人隐私!
我们能帮你什么?
解决导师放养,无人指导,不知道如何做科研的问题
解决只了解零散知识,没有清晰的体系的问题
帮助同学建立科研思维,熟悉科研流程
帮助同学系统掌握掌握经典与前沿算法,形成清晰的体系
协助同学将模型理论与代码实践相结合,提升实践能力
助力同学将baseline深化拓展,形成自己的论文
一直浪费时间,做无用功,不如试试辅导!

什么样的人适合论文辅导
在读计算机专业硕、博,导师放养,无人指导,希望获取论文创新思路
有科研需求,积累科研经验,提升职称,提高学术科研研成就
从事人工智能领域相关工作,想升职加薪,提高竞争力
考研申博留学,提升简历含金量

辅导流程
我们提供个性化论文指导服务、导师实时互动、录播无限次回看免费课后答疑、24h无时差上课。
无论你目标是CCF-A/B/C、SCI1-4区,还是EI会议,这些 “大牛导师” 都从选题、调研、idea验证、代码、实验、润色、投稿、直至中稿一站式科研服务。
服务方式
班主任:全程督学,跟进学习进度
Q&A
Q:零基础能发论文吗?
A:能!我们提供基础课程,供同学们在课下自主学习基础内容,只要踏踏实实地跟着导师从文献带读学起,跟上每堂课的节奏,6个月就能出一篇小论文!
Q:导师和我方向不匹配怎么办?
A:我们有精准匹配系统:填完咨询表后,学术顾问会根据你的研究方向、目标期刊、基础水平,从300+导师中筛出3-5位最契合的,你选满意的再开始辅导。
Q:除了paper,还能获得什么?
A:优秀学员可获清北/MIT 等名校推荐信,推荐到实验室实习;表现突出的直接内推阿里达摩院、华为诺亚方舟等企业研发岗 —— 发论文只是起点!
Q:可以免费试听课程吗?
A:预收定金可以和名师meeting,我们郑重承诺meeting不满意可以免费更换老师/退款;
Q:收费贵吗?
A:不同的分区价格不同,我们会根据你的情况给你做详细的介绍,以及如何帮助你达到你的目标。填完咨询表后,学术顾问会根据你的发文目标做详细报价。


















 1458
1458

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









