



作者 | 胖胖橙 编辑 | 自动驾驶之心
原文链接:https://zhuanlan.zhihu.com/p/12939525225
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
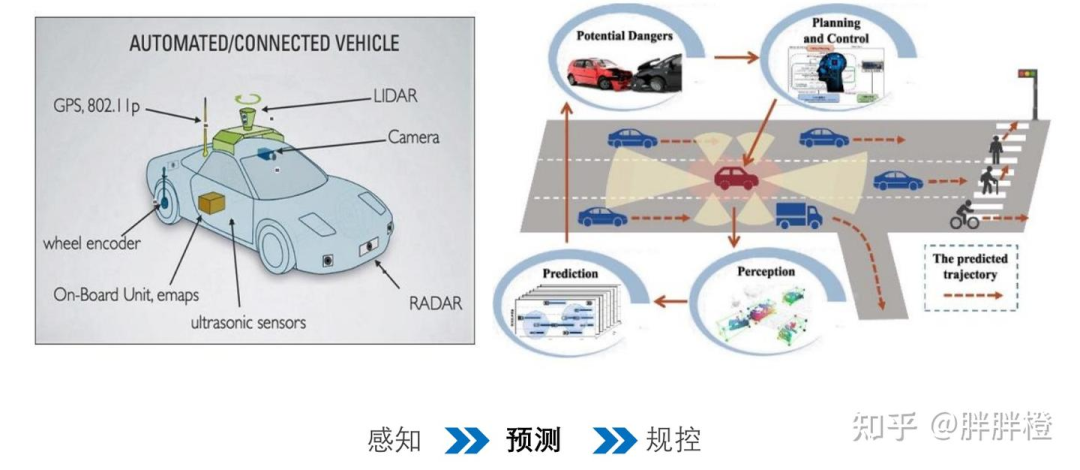
1. 预测系统概述
通过已有的感知信息及常识,推理出目标一段时间后的行为,来决定自己当前的动作。
1.1 预测系统的必要性
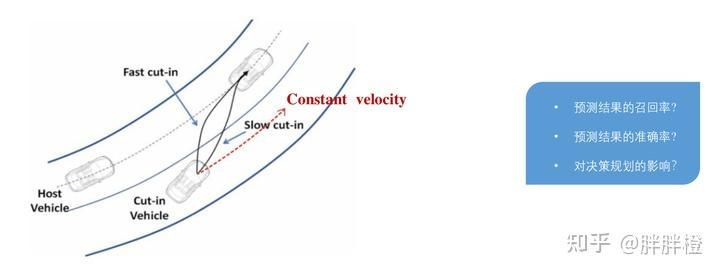
对于隔壁车道目标 cut in 场景,如何平衡召回率(Recall)和准确率(Accuracy),对决策规划分别有何影响?
如果recall过低,隔壁车辆切入,会存在误检,存在碰撞风险。
如果Accuracy过低,可能存在误识别隔壁车切入,存在误制动问题。
召回率(Recall) 和 准确率(Accuracy)
召回率(Recall) 和 准确率(Accuracy) 都是用于评估分类模型性能的重要指标,但它们侧重点不同,适用于不同的场景。
召回率(Recall)
召回率主要衡量的是模型能够识别出多少实际存在的目标(正样本)。它的核心关注点是减少漏报,即确保尽可能多的目标被正确识别,特别是在自动驾驶场景中,涉及检测行人、车辆、障碍物等时尤为关键。

其中,TP(True Positive):正确预测为目标的数量,FN(False Negative):漏掉的实际目标的数量。
召回率高意味着系统漏掉的目标较少,减少了碰撞或事故的风险,但它可能会增加误报的风险。
准确率(Accuracy)
准确率衡量的是所有预测中,模型预测正确的比例。它包括正确的正样本(TP)和负样本(TN)。

其中,TN(True Negative):正确预测的负样本,FP(False Positive):误报的负样本。
准确率高并不总是意味着模型好,特别是在数据不平衡的情况下。
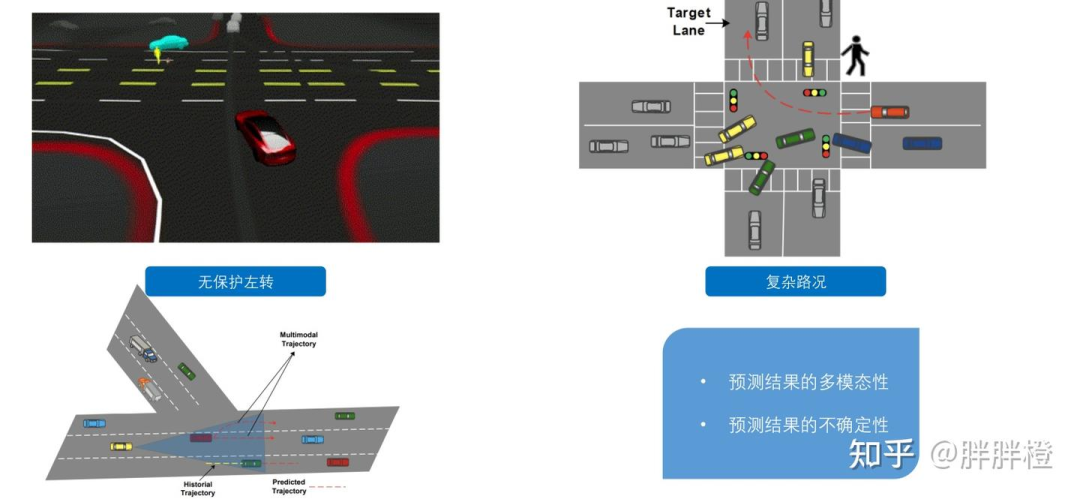
预测结果的的多模态性、不确定性。
意图多模态,预测不可能百分百准确。预测系统主要考虑一下几个问题:
如何基于环境信息进行建模?
模型应该输出哪些信息?
对于长时间的预测应该怎么做?
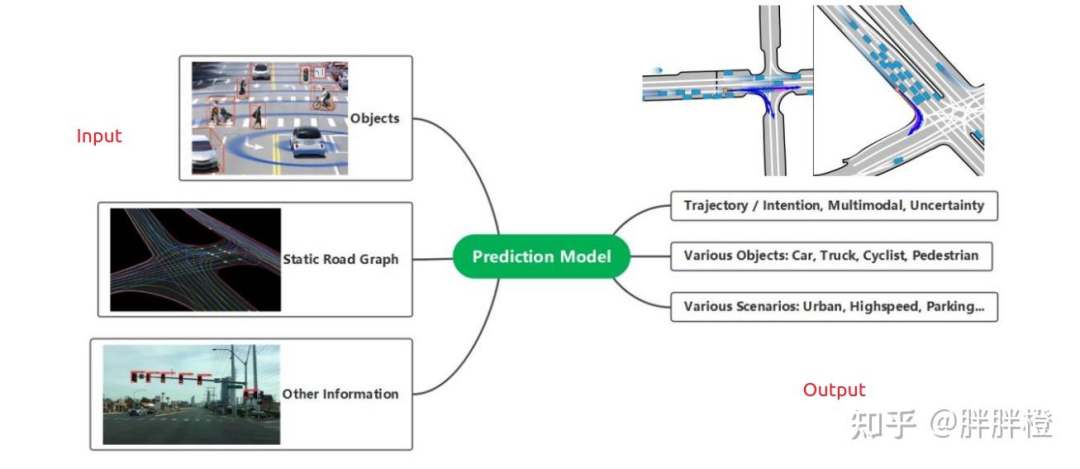
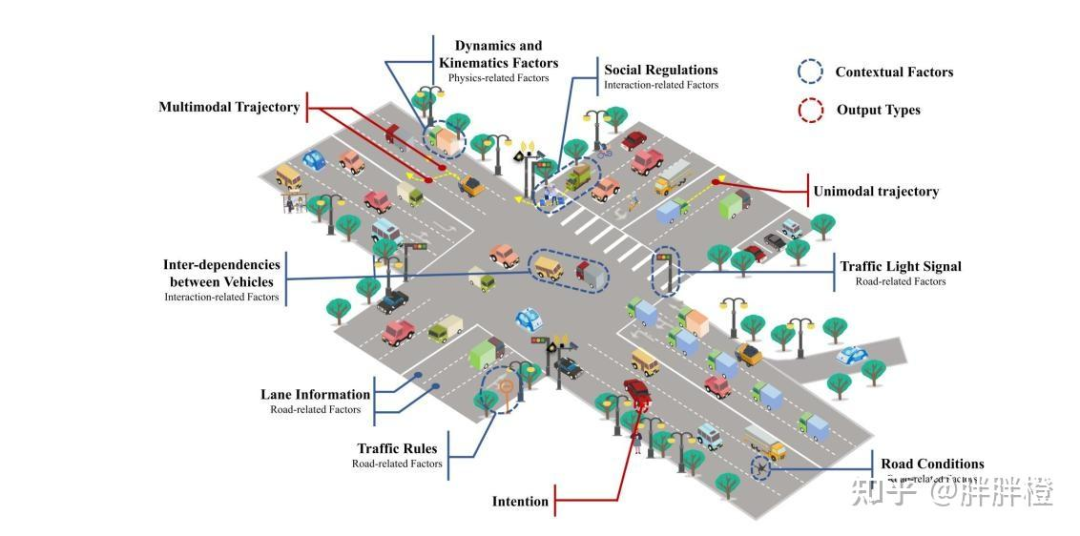
1.2 预测系统的架构
输入表征:agent feature、map、其他辅助信息.
输出表征:trajectory\intention、object、scenarios.
1.3 预测系统的发展
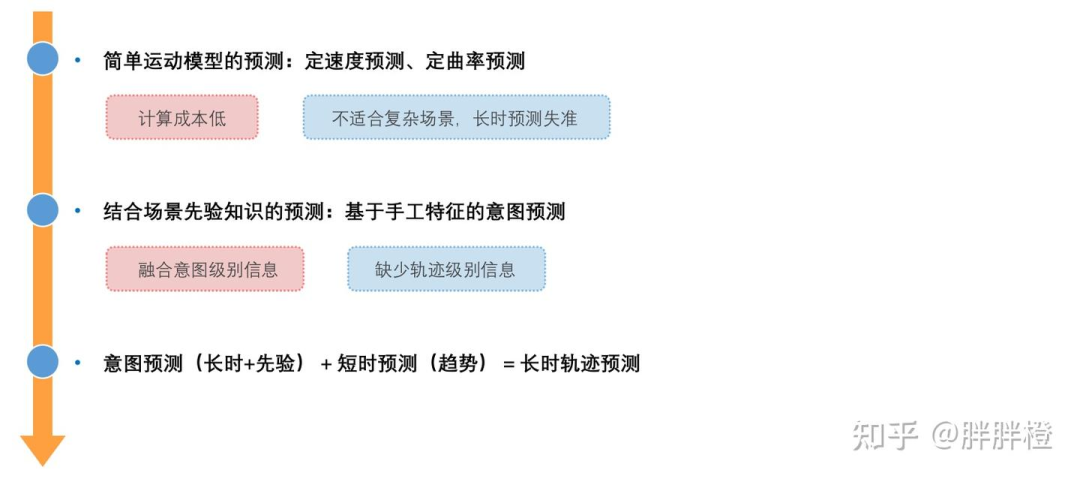
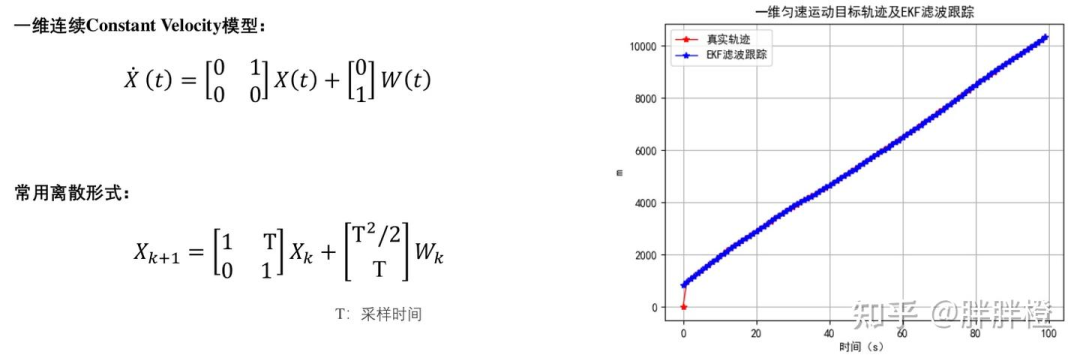
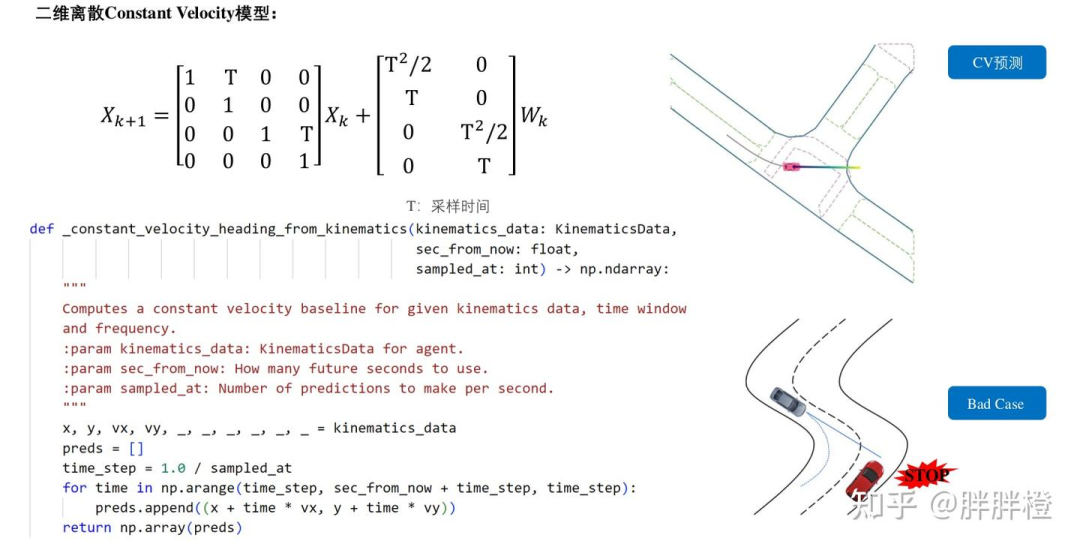
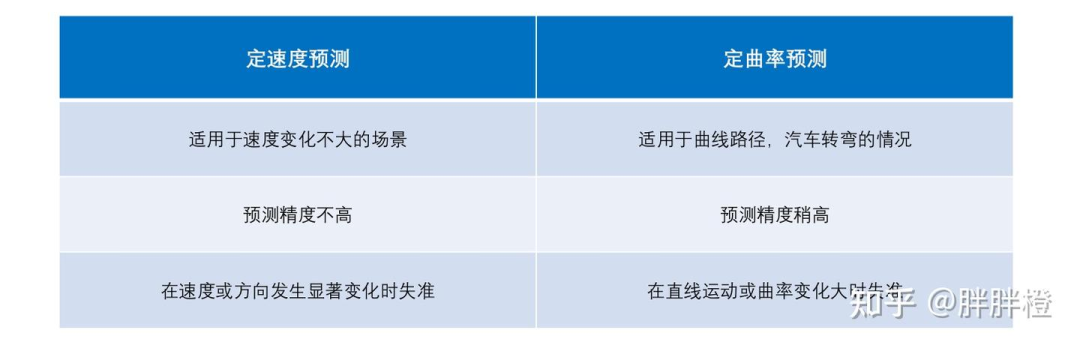
2. 定速度预测
一维匀速运动模型:感知信息不确定,道路结构缺失等情况,适用CV 模型。
目标做匀速直线运动,加速度为0。现实中速度会有轻微扰动变化,可视为具有高斯分布的噪声。
一维运动:仅沿着 x 轴或 y 轴方向运动,因此状态向量只需要描述位置和速度。
一维状态向量:
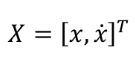
局限:与感知耦合密切, 目标的yaw 与 velocity会影响预测的轨迹。感知系统存在的误差,会直接影响到预测。
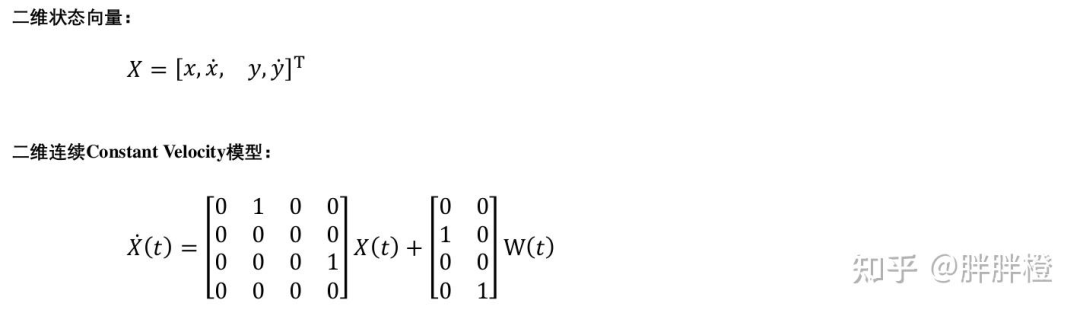
二维匀速运动模型
二维模型:在 x-y 平面上运动,状态向量需要同时描述 x 和 y 两个方向的位置和速度。
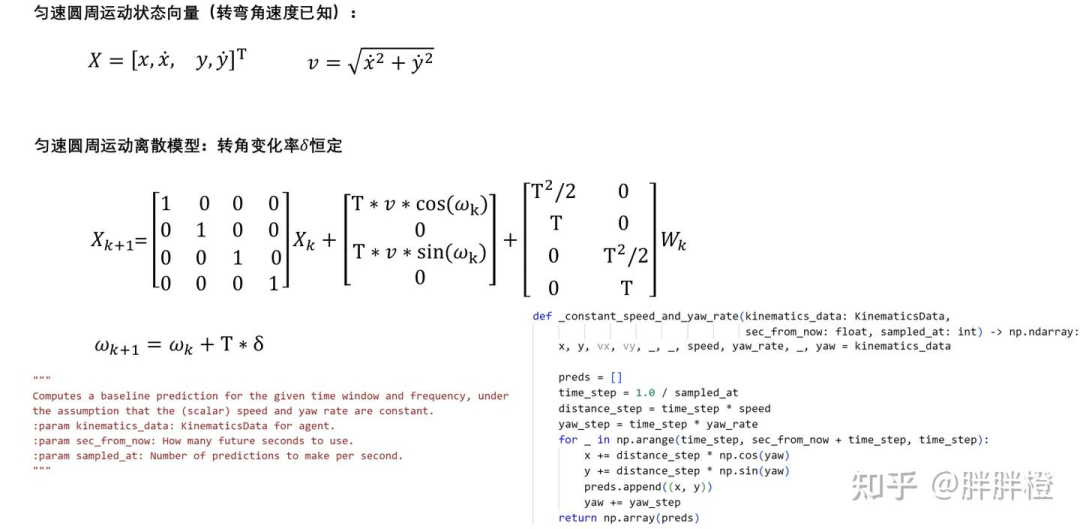
3.定曲率预测
目标车过去按照某一曲率运动,假设会继续按照该曲率运动。
定曲率意味着物体的运动轨迹具有恒定的曲率,即轨迹为一个圆弧或圆的一部分。
在物体运动时,转向角速度(yaw rate)保持不变,因此物体会沿着一个固定半径的圆弧运动。
缺点:曲率估计不准确时,误差会比较大。
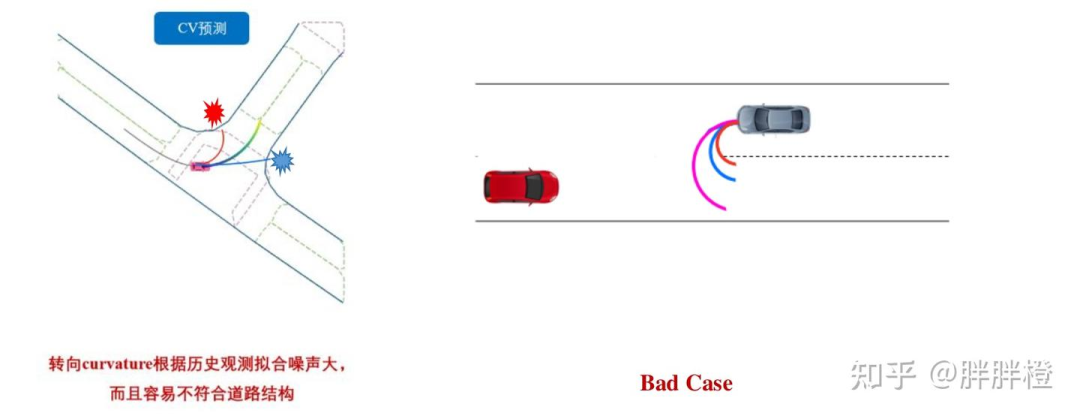
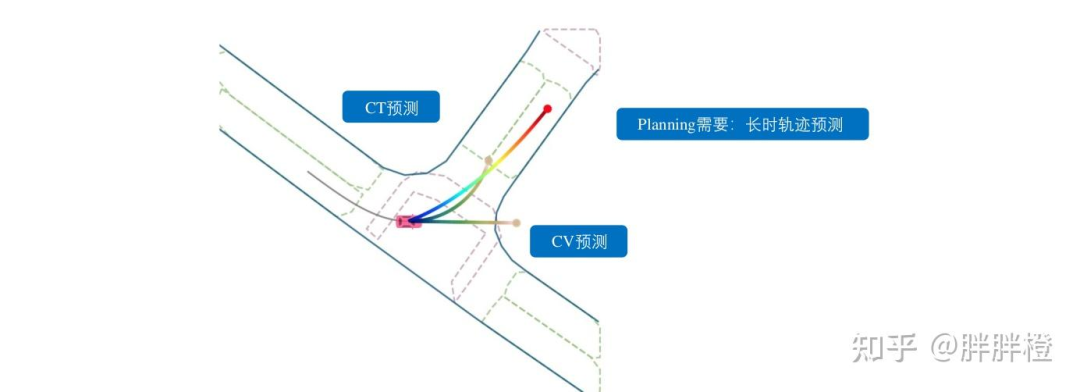
共同局限:长时间区间会失准!
4. 短时预测与长时预测
预测不确定性随着预测时间变长显著增大。
短期预测:基于运动学模型或者预测网络,完成短时推演,一般为 3s。
长期预测:结合意图预测,稳定长时预测,避免远端发散,符合道路结构一般为 8s+。
如何解决 预测时间越长,预测越不准确的问题?引入 意图预测。
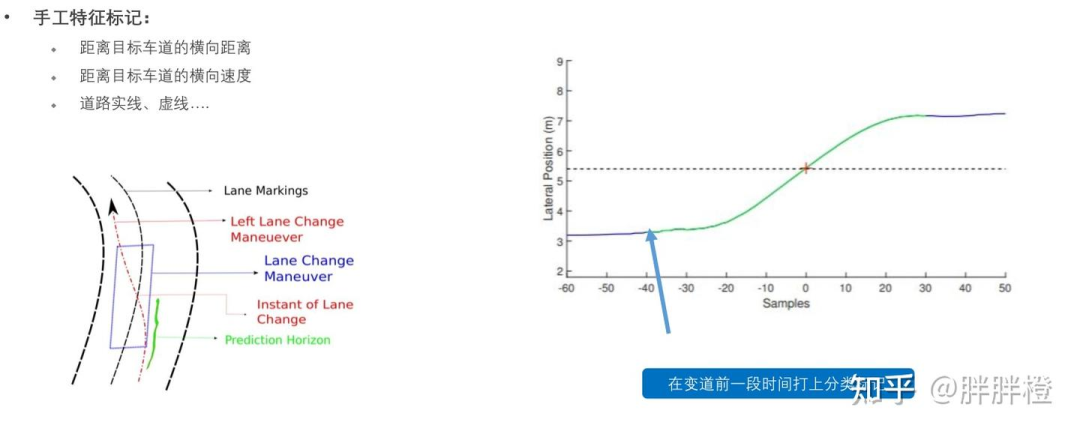
5. 基于手工特征的意图预测
意图:预先定义的车流行为,如变道,左右转等。意图一般会绑定到车道、路口两个信息上。
分类:基于车辆的行为特征,对车辆的意图进行分类。意图转变为分类问题。
5.1基于SVM的意图分类
支持向量机Support Vector Machine(SVM)
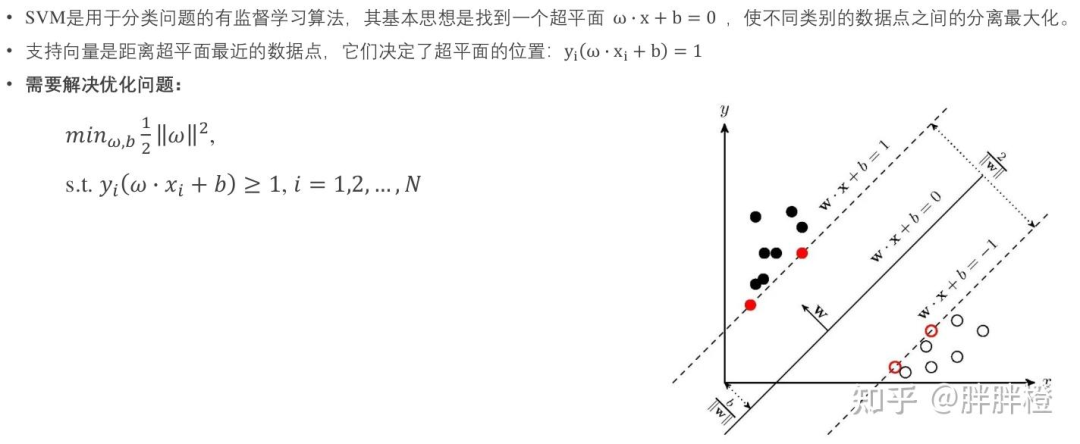
以预测目标车是否会变道为例,二分类问题。
手工特征标记:距离目标车道的横向距离、距离目标车道的横向速度、道路实线、虚线 、目标车与前车的距离或者速度等等 。
特征如何选取?选择哪些维度?拓展特征维度有什么意义?
变道前一段时间,预测出其变道行为,需要提前多久?(超参,变道趋势不一样。如果较早,缓慢变道与Lane keep不易区分,较晚,较低预测性能)

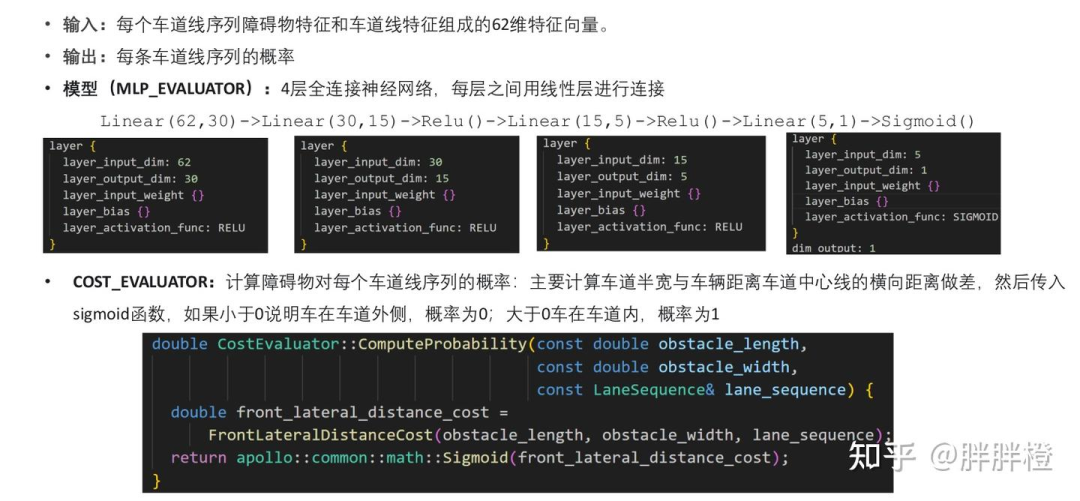
5.2 基于神经网络的意图预测
将原始信息进行编码,使用高维向量进行输入,通过多层感知机预测障碍车会选择哪一条车道行驶,输出每个车道线的概率。DNN + Rule兜底。
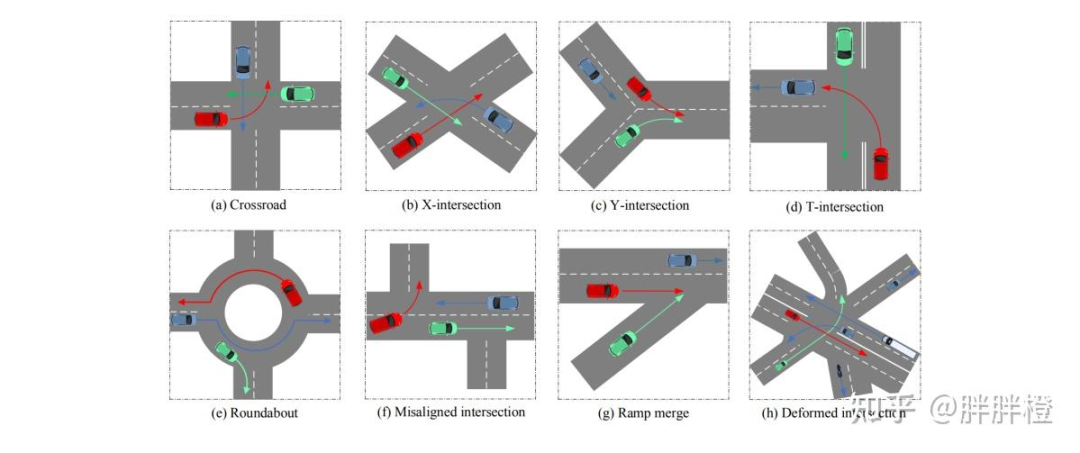
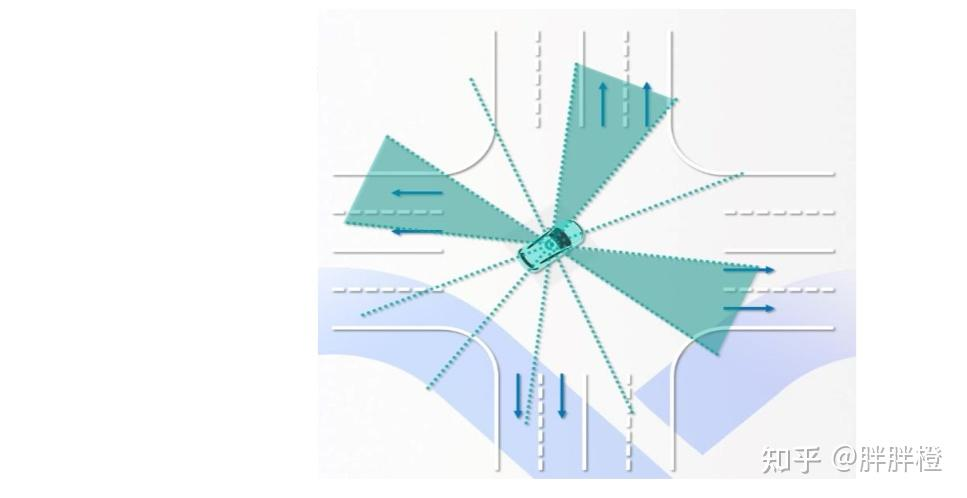
5.3 其他的输出建模方法
将路口进行扇区划分进行交通路口的变道意图预测
输入:障碍物自身运动历史,路口车道信息,周围其他障碍物信息。
模型:以障碍物车朝向为参考方向,划分为12个扇形区域;记录每个扇形区域内是否有离开该路口的车道;将问题转化为12元分类问题。
输出:每一个扇形区域行驶的概率,然后对扇形区域内的所有lane segment赋上概率。
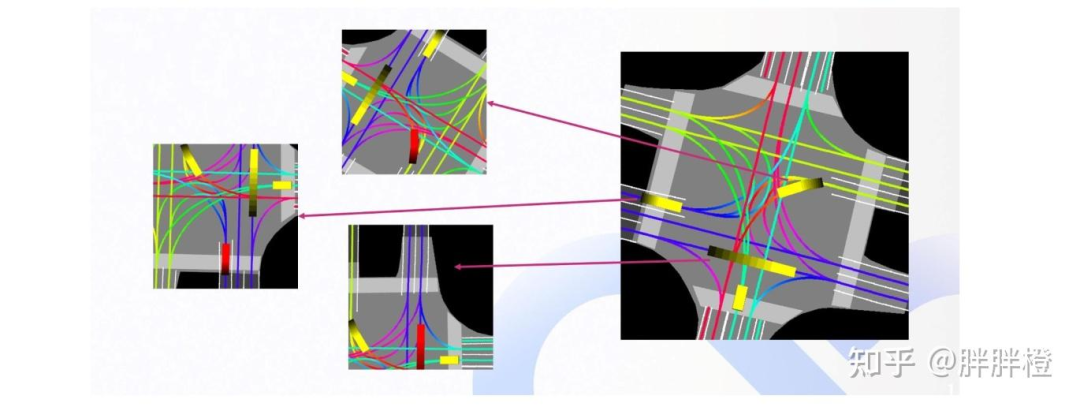
5.4 其他的输入建模方法
人工构造的输入特征有天然局限性
输入:语义地图渲染的方式,将障碍车的历史运动状态、车道的形状与连接关系,以及其他车的运动状态和历史,都转化为图像信息。(看图说话,根据图像信息,预测目标轨迹)
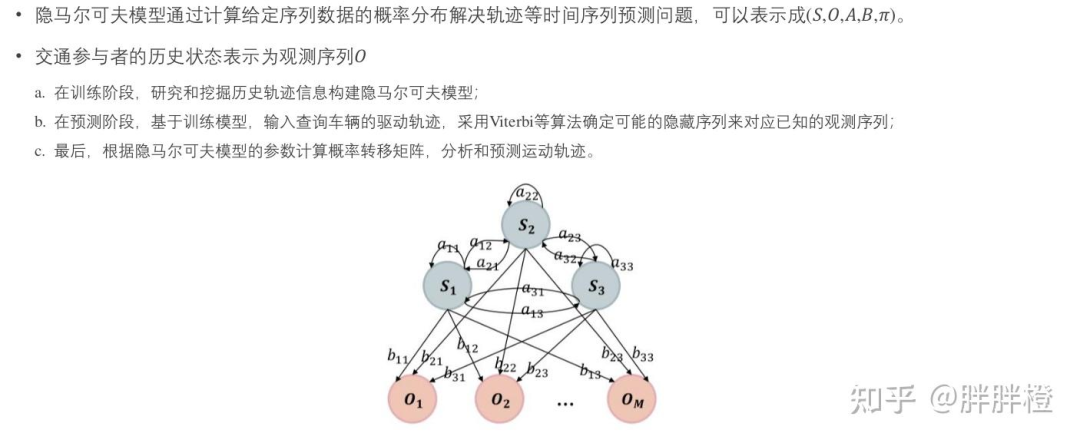
5.5 其他的分类模型建模
基于隐马尔可夫模型的意图估计
6.基于模型的轨迹预测
6.1 如何将短时轨迹结合长时意图,生成长时轨迹?
长时轨迹生成 -> 轻量化的planner
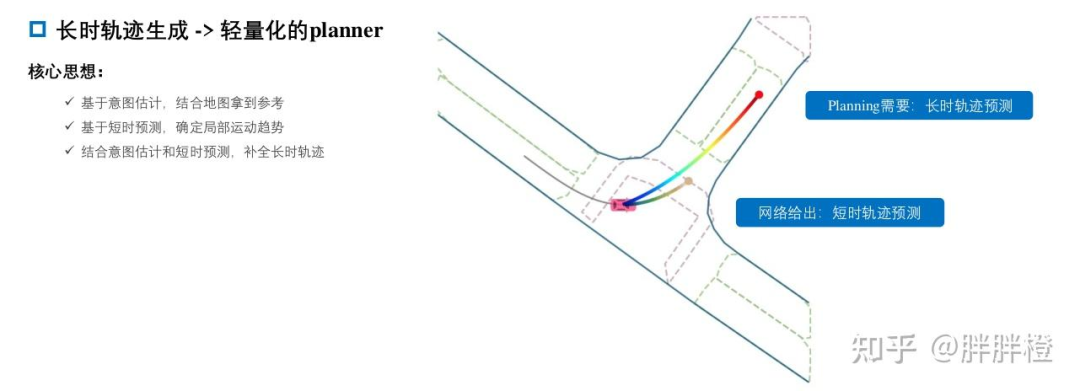
通过意图估计得到目标车要驶入某个车道,并根据运动趋势等得到短时的运动轨迹,如何构造出长时预测轨迹?
优化目标:贴合短时轨迹、符合常识意图
约束条件:满足运动学约束 、与地图等信息匹配
寻找一个规划器,得到未来的轨迹点,并且要做到轻量化。
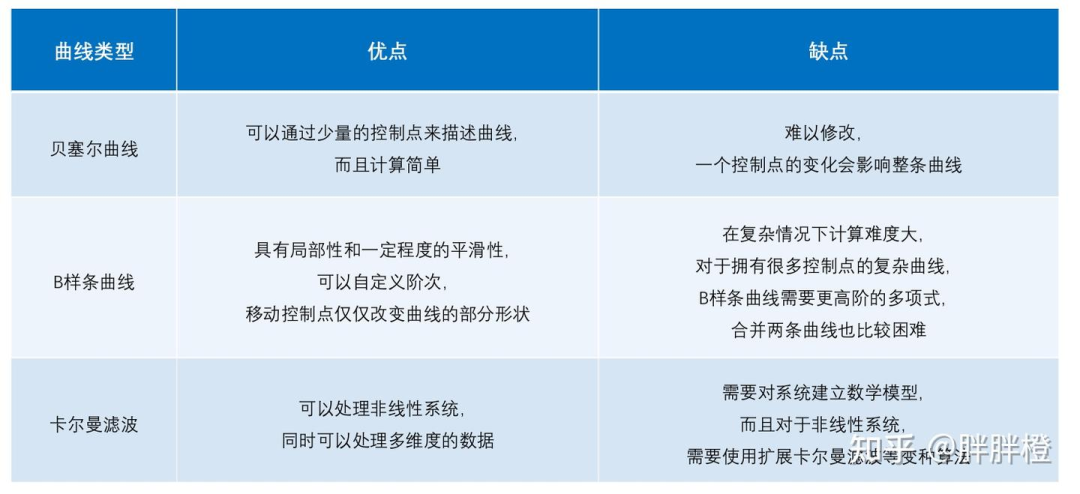
Planner 三把斧:搜索、采样、优化,对该问题,不适用。使用现有的轨迹生成方式,如贝塞尔曲线、样条曲线等。
控制点的生成策略 --> 决定曲线的生成。意图预测判断出车道后,可以灵活基于地图抽取控制点。
Bezier曲线基本原理
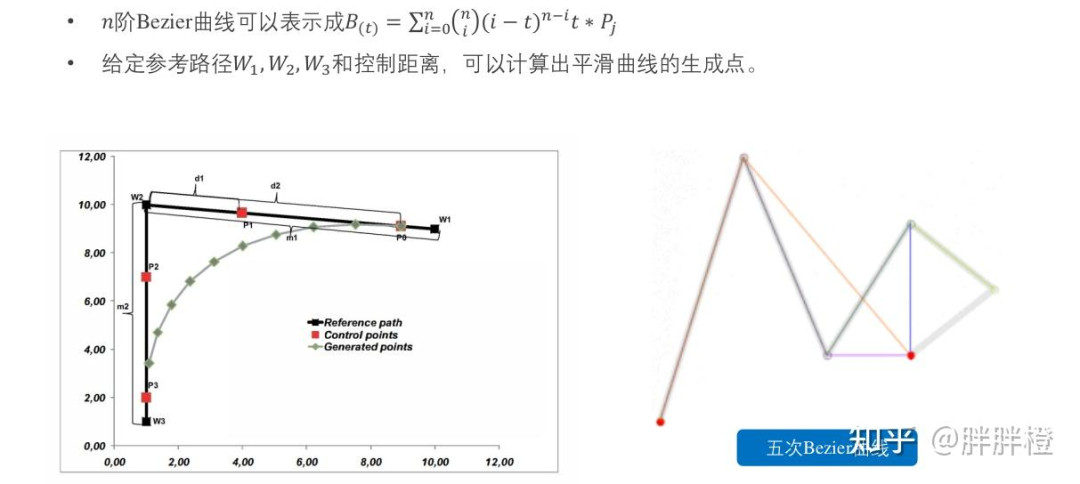
Bezier曲线的数学方法
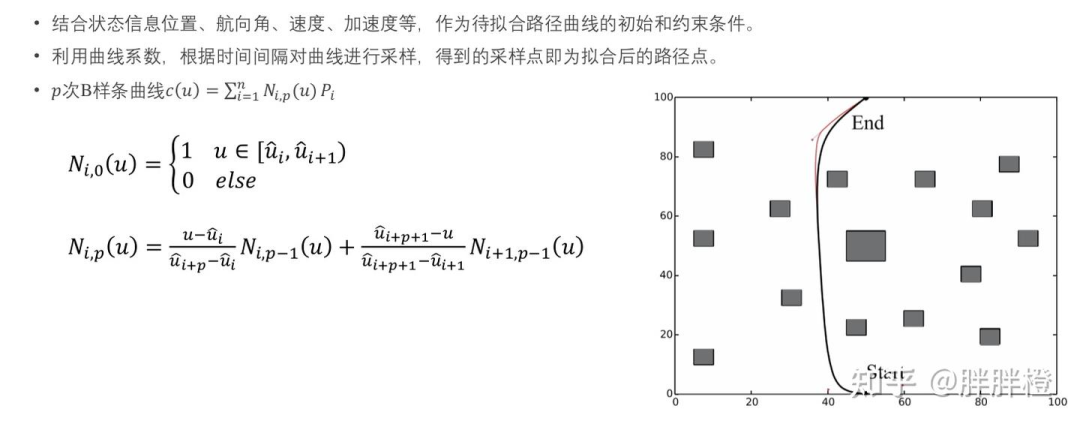
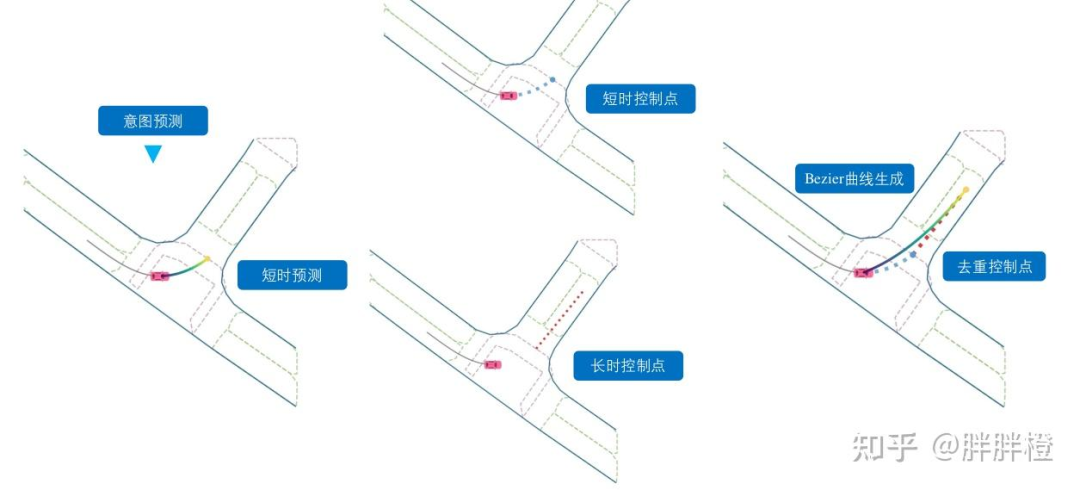
基于Bezier曲线的长时轨迹生成过程
意图预测 --> 根据意图查询地图,得到车道信息等 --> 长时控制点
短时预测轨迹 --> 短时控制点
长时控制点+短时控制点 --> 短时控制点与长时控制点衔接、插值去重拟合 --> 长时轨迹
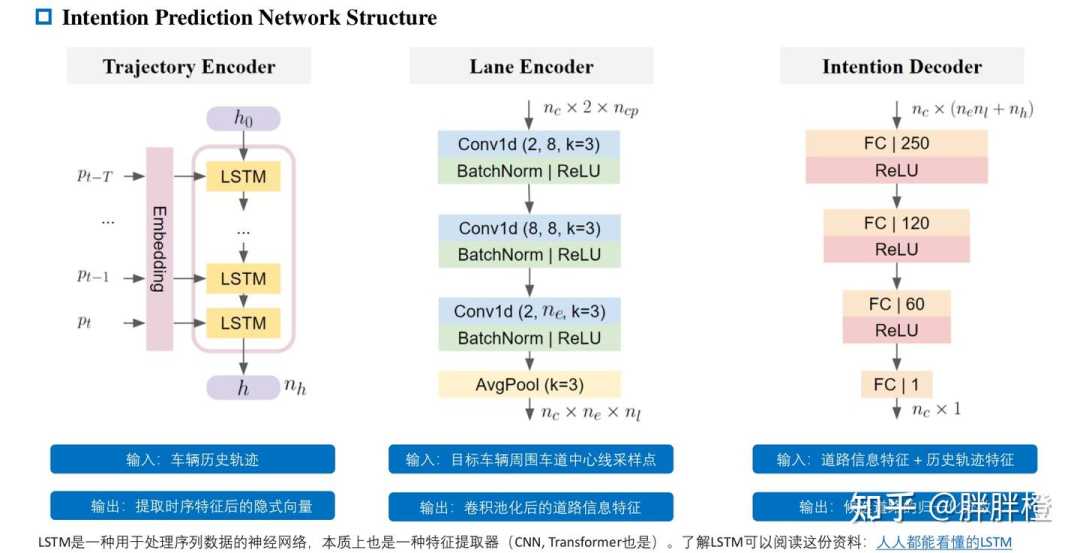
6.2 EPSILON: Intention Prediction Network
arxiv.org/pdf/2108.07993.pdf
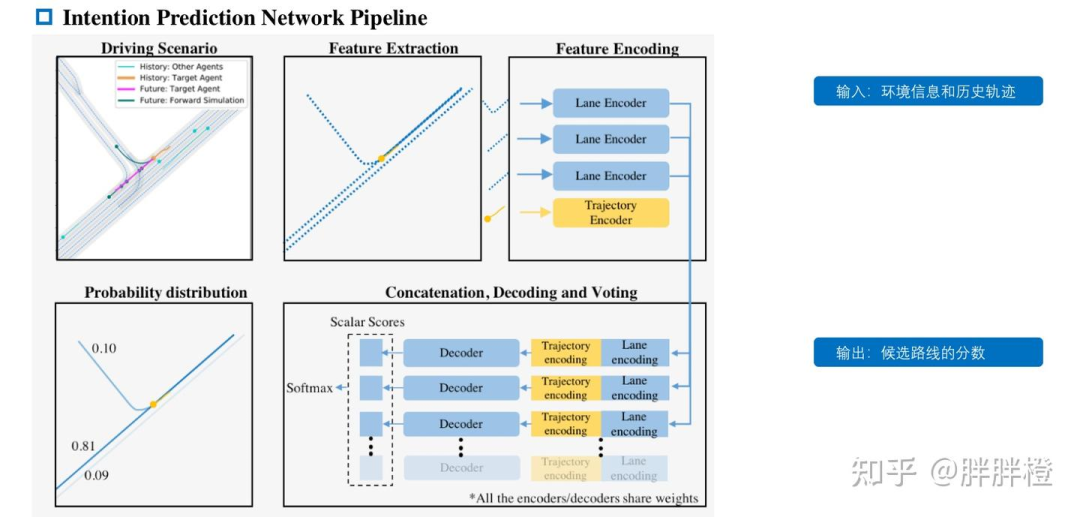
Agent历史轨迹 --> 特征抽取 --> 坐标转换/编码 --> 拼接/解码/归一化 --> 候选路径及概率
思考:全局归一化是否合适?
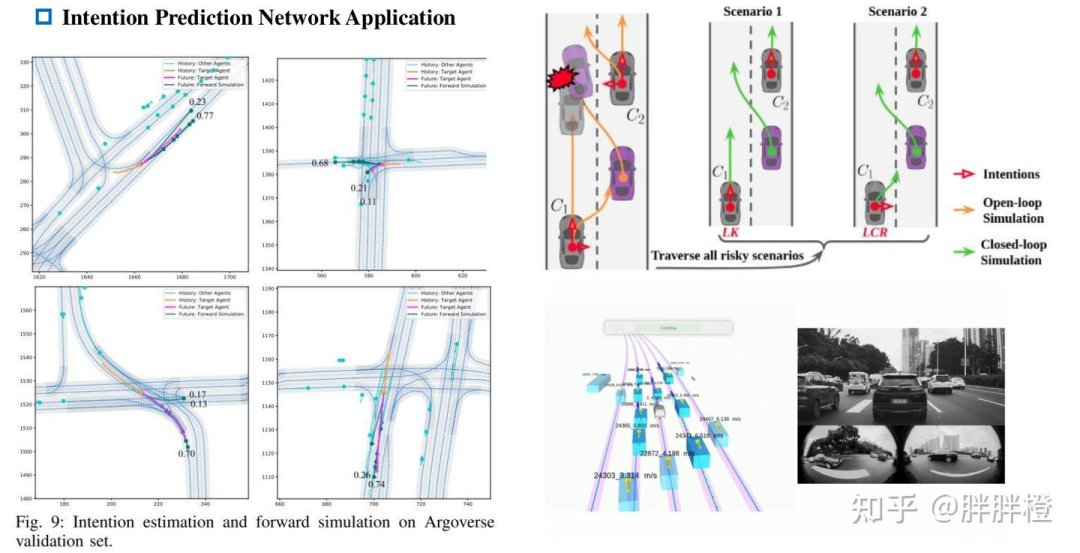
意图到轨迹:使用前向仿真,forward simulation,对于交互更加友好些,完成长时轨迹推演。
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵


















 1962
1962

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









