



2022年9月Tesla AI Day上Occupancy Network横空出世!迄今为止各种占用网络层出不穷,那么占用网络到底有哪些优势?又或者说我们为什么需要Occupancy Network呢?
业内普遍认为主要有以下几个原因:
能够得到3D占用的信息:相比于基于BEV的2D预测,多了高度方向上的信息。因此可以在同一xy坐标上对应多个z高度,更精细地预测占用信息,解决同一xy坐标上有多个物体的问题;
多模态信息的统一表示:从Infer角度,无论是Camera Lidar或者其他传感器,都能在BEV空间统一回归Occupancy信息;从AutoLabel角度,Camera Lidar甚至毫米波和超声波都能方便地转化成Occupancy;而从本质上理解,Occupancy如果把voxel size无限缩小,那就和点云是一种表示;
分离了语义和几何:Semantic和Geometry的解耦,让涉及到行车安全的Geometry训练和Semantic显式分离。也因为解耦了Semantic从而部分绕开了Open-set Detection的思路。
以上内容均出自《国内首个面向工业级的Occupancy占用网络全栈教程!》,同时汽车人也为大家准备了国庆超大八折优惠券,仅限今日名额有限!
八折优惠仅限今日!扫码加入学习!
如何入门学习?
而目前国内还没有任何一套关于Occupancy Network的教程,导致无论工程界,抑或是学术界,都对这个领域比较陌生,不知道如何搭建自己的数据集和优化模型,为此,自动驾驶之心自研了国内首套Occupancy课程,从0到1为大家详细阐述占用栅格网络的数据生成、评测、可视化、训练加速、模型优化、后处理等方方面面。内容不仅适用学术界,更直接面向工业界,适合刚入门小白和企业算法工程人员,帮助大家快速入门,成为早期研究Occupancy Network的人员,大纲如下:
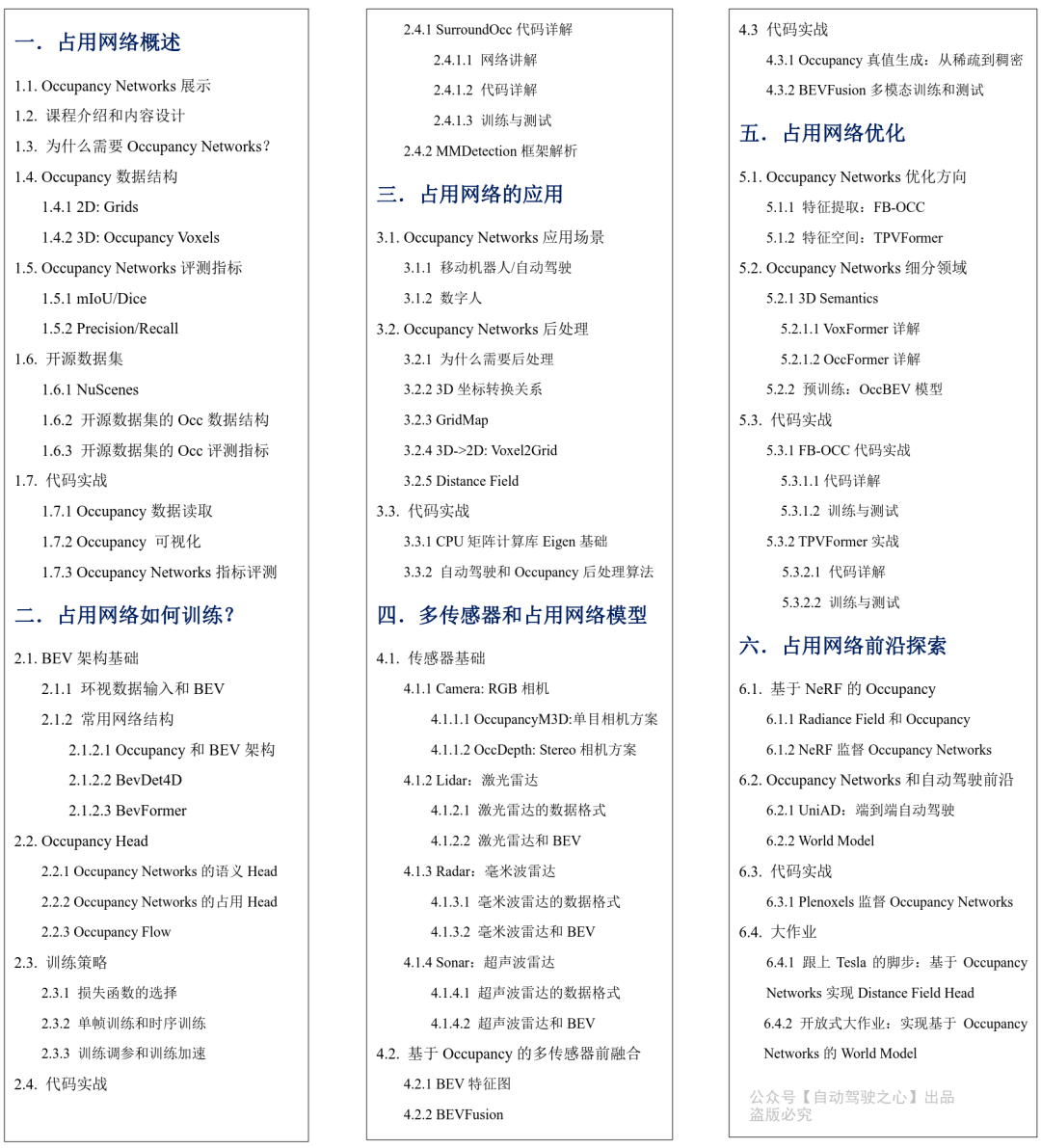
课程采用T型结构,横向注重基础,纵向注重深度:
第1~3部分注重Occupancy Networks的理论基础和完整实践,让学员快速打通由初识到训练到应用的全链路;
第4部分进阶,深入理解多传感器前融合在Occupancy的应用;
第5部分进阶,深入理解Occupancy的细分领域及优化和改进方向;
第6部分前沿探索,探讨Occupancy的交叉领域和发展方向 课程全部资料来自公开内容的重构。
课程特色
• 由浅入深,循循渐进:从占用栅格最基础的概念到如何生成训练数据、BEV与Occ的关联、Occ损失函数、如何训练加速占用网络,以及各类网络实战、后处理解析,一应俱全,同时面向工业界和学术界;
• 小白友好:能够站在初学者的角度,从0到1为大家展开讲解,真正做到知其然,更知其所以然;
• 大量实战:项目实战和理论结合,针对可视化、指标评测、训练加速、后处理、真值数据生成以及各类网络代码详解,应有尽有;
• 学完达到1年感知算法工程师水平;
课件+代码,随时学习
好的学习方式,不仅仅只停留在算法理论上,实践出真知,要做到知行合一。课程为大家配套了一系列实战类代码,从数据读取、可视化、指标评测、到后面的训练加速、真值数据生成、Eigen矩阵计算、后处理、以及各类模型设计(SurroundOcc、FB-OCC等)展开了详细教学,彻底搞懂每一个知识点,少踩坑。
讲师介绍
思凯,就职于某头部自动驾驶公司,在自动驾驶和计算机视觉领域深耕多年,多项顶会比赛中拿到第一或前列,在自动驾驶感知算法领域积累了全面的技术洞察力和实践经验。
课程学后收获
对占用网络有一个非常完整的认识,从方法论到coding,真正能够理解这个领域的发展、应用、优化以及后面的方向;
能够将课程中的内容快速应用到科研工作与实际量产项目中,节省时间成本;
相比于其他行业从业者,更具有竞争力,同时也能够结识许多行业从业人员与学习合作伙伴!
学完达到1年感知算法工程师水平,成为早期研究Occupancy的科研/工程人员;
适合人群
计算机视觉与自动驾驶感知相关研究方向的本科/硕士/博士;
CV与自动驾驶2D/3D感知相关算法工程人员;
量产和预研工作需要的同学,面向L2~L4级应用;
对计算机视觉有部分了解,具有一定的Python、Pytorch基础的小伙伴;
开课时间与学习方式
2023年10月15号开始学习之路,历经两个月,离线视频授课。主讲老师在微信学习群内答疑,对课程中的算法、代码、环境配置等问题一一解惑!
课程咨询与购买

八折优惠仅限今日!扫码加入学习!
咨询小助理微信咨询:AIDriver004
版权声明
自动驾驶之心所有课程最终版权均归自动驾驶之心团队及旗下公司所属,我们强烈谴责非法盗录行为,对违法行为将第一时间寄出律师函。也欢迎同学们监督举报,对热心监督举报的同学,我们将予以重报!
投诉微信:AIDriver004(备注:盗版举报)

















 5206
5206

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









