



作者 | 量子位 编辑 | 计算机视觉life
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【端到端自动驾驶】技术交流群
本文只做学术分享,如有侵权,联系删文
马斯克还真开着特斯拉“去小扎家”了,全程直播无剪辑!
不过说“开车”已经不准确,因为这回是新版FSD全程给马斯克“代驾”,45分钟里他本人只上手干预了一次。
也就是钢铁侠亲自上阵,搞了一场自动驾驶路测。
坐标加州Palo Alto,从特斯拉新工程总部出发,中途曾用谷歌地图搜索扎克伯格家地址并导航。

马斯克搭乘一辆老款Model S,硬件还是基于HW3的版本,但软件已经是未正式发布的新版FSD V12。
尽管画质不到480p,但这场𝕏平台上的直播,已吸引超1000万人在线围观。
之所以备受瞩目,倒不全是大家伙吃瓜“马扎笼斗”的热情太高,主要在于FSD V12被称为特斯拉自动驾驶最重要的一次升级:
实现了完全端到端(End-to-end)方案,输入一端是图像,输出一端是对汽车的控制指令,中间完全由神经网络处理。
马斯克自己的说法要更咋呼一点:
光子进,行为出,和人类一样。
试驾过程中,马斯克多次表示现在的系统没有一行规则和条件判断代码,不需要高清互联网地图。
比如,在经过路边一位骑行者时,马斯克就强调“没有任何代码声明要给骑自行车的人让行,没有等待x秒之类的东西,只有(神经)网络。”
This is all net, baby, nothing but net.
知名科技博主Robert Scoble表示:世界从今晚开始改变。
十年后,人们将把这一时刻定义为机器人的首次公开演示,机器人仅通过看视频就学会在现实世界中移动。
这是软件构建方式的范式转换。

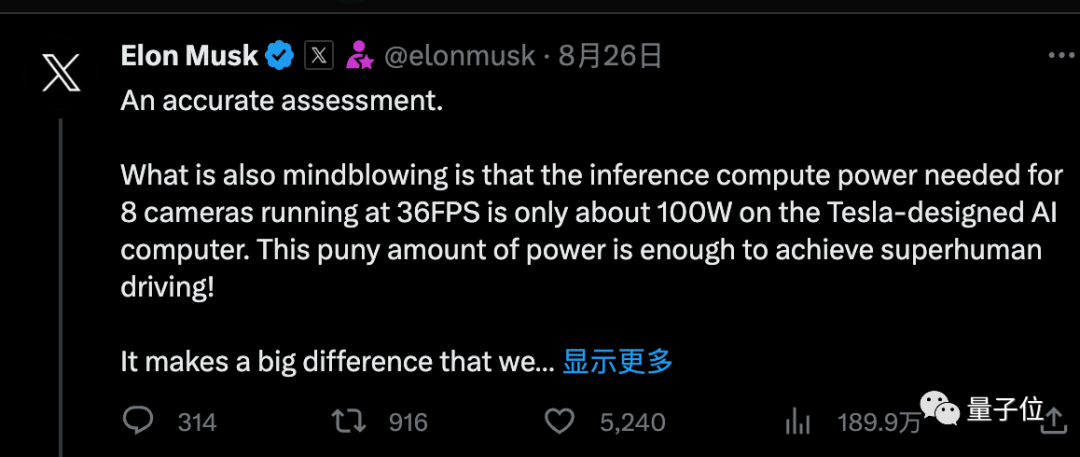
马斯克也回复他:准确的。
同样令人惊讶的是,所需的推理计算功率只需要100W。
45分钟路程仅一次干预
为了凸显真实性,马斯克从地图上随机选择了目的地。
行驶没一会儿,汽车来到了一条两边全部立满红色柱子的施工区域,对于这一“反常”路况,车辆顺畅通过:

在本次路程的第一个红灯之处,Model S完美停住。
等待左转灯绿起之后,它便通过无保护左转(UPL)非常流畅地驶入左边的另一条马路。
这是自动驾驶领域中一个比较难的场景,要考虑到地面引导标、左侧行人、前方车辆等情况,马斯克表示:
看直播可能看不太清楚,但车辆行驶得很平稳。
大约5分钟时,车辆又碰上一片减速带,Model S顺利完成自动减速。与此同时,一辆自行车在右侧飞速前进,但丝毫不会对它造成影响。
也禁住了环岛的考验。只见在这样的环形交叉路口,Model S先等前方的两辆白色汽车通过之后,便立刻转弯进入:
大约10分钟之后,车辆载着马斯克到达了今天的第一个目的地,接着再前往下一个随机地点。
期间汽车路过斯坦福大学,人群变得多起来,Model S毫无压力,并礼让了行人:
由于直播逐渐进入晚高峰时段,马斯克也吐槽车开的有一点慢。
但一切都按照预期发生,直到19分左右,马斯克进行了第一次干预,也是全程的唯一一次。
当时,想要直行的车辆在路口已经等了很久红灯,而在对面信号灯刚刚转为左转状态时,Model S竟突然跟着启动。
不过马斯克和旁坐的工程师反应迅速,连忙干预制止。

险情结束,老马也直言:
这就是FSD v12还未真正公开发布的原因。
后面剩余的25分钟路程都顺利结束,直播还展示了FSD的靠边停车功能等等。

而在整个直播过程中,马斯克反复强调得最多的一点就是:
无论是最开始遇到的红色立柱、减速带,还是后面遇到的骑行路人、环岛路口,FSD系统都不是靠任何一行控制代码来完成决策的。
相反,FSD只是看了非常多的视频,然后完成了训练,得到了一个神经网络。
(特斯拉Autopilot的决策从2020年开始由编程逻辑转为视频训练的神经网络,在FSD v12之前,v11版本控制堆栈中有超过30万行C++代码。)
像19分钟的那次闯红灯行为,马斯克就告诉观众,解决方案本质就是再多喂更多交通信号灯的视频,尤其是左转灯的,然后就会起作用。
当然,胡乱投入大量视频是不够的,来自优秀人类驾驶员的高质量数据才是训练特斯拉Autopilot实现FSD的关键。
大量平庸的数据并不能改善驾驶,数据管理实际上相当困难。我们有相当多的软件去控制系统究竟选择什么数据、训练什么数据。
除了不靠任何代码完成决策,马斯克还强调:
FSD V12不用时刻联网就能完成一切。
当然,如果有干预行为发生,系统会将它记录下来并发回特斯拉进行分析。
由于决策全部在本地进行,特斯拉FSD用8个摄像头以每秒36帧的速度进行拍摄,但系统的计算速度其实可以更快,达到每秒50帧,只可惜相机的速度已经到头了。
不联网进行决策也意味着地图也不用随时更新,用马斯克的话来说:
系统只需要坐标,就会自行找到位置。
另外值得注意的是,本次测试FSD V12的Model S安装的还是HW3。
在HW3上解决L5级自动驾驶之前,特斯拉可能不会在HW4车辆之上启用FSD。这意味着HW4的FSD访问权限可能推迟到2025年。
一万张英伟达H100周一上线
作为知名的时间管理大师,马斯克试驾途中还抽空语音连线了一个网络讨论会。

在这里他回答的问题和透露的重点内容有:
为什么改用端到端方案,优势在哪?
马斯克认为“人类就是这样运作的”,人类用眼睛和生物神经网络开车,自动驾驶用摄像机和数字神经网络开车是正确的通用解决方案。
虽然神经网络缺乏可解释性,相应的司机也经常说不清楚如何做的决策,只是凭经验。
乘客在做人类司机的出租车时,也无法准确知道司机在想什么。而特斯拉屏幕上显示的画面,就是自动驾驶系统在 “想什么”的一个近似。
高端GPU将继续短缺,世界进入强算力依赖阶段。
马斯克透露AI训练主要还是用的英伟达硬件,特斯拉Dojo超算作为辅助,今年花了约20亿美元在训练上面(大部分是硬件资产)。
我认为未来全人类80%-90%的算力都会用在神经网络上。
AI训练需要把算力集中在一个地方,避免数据传输带宽的瓶颈,也会带来很大的电力负担。
马斯克在这里还开了一个玩笑:Transformer架构的神经网络需要越来越多的硬件Transformer。
比GPU更缺的是高速连接设备。
面对“拥有5000张H100是什么感觉?”的提问,马斯克表示:说少了。
包含1万张英伟达H100的新算力集群,正在24/7加急准备中,周一(也就是今天)上线。
而且不像很多公司声称“拥有”算力其实是租的云计算服务,特斯拉就是真的买了1万张GPU自己搭系统。
在这样的大规模集群中,设备之间的网络连接非常关键,英伟达InfiniBand交换机可能会比GPU本身更缺。
……
直播结束后,特斯拉AI基础设施主管Tim Zaman进一步透露,即将上线的算力集群拥有200PB的热缓存,比训练大模型的系统多几个数量级。
也是一个让很多从业者觉得不可思议的地方,比如GitHub前CEO。
Tim Zaman表示尝试了很多云计算供应商,但没有一个足够好,聘请了存储系统架构师来开发AI专用的分布式文件系统。

最后,回到此次直播测试。
不少网友不吝惜自己的赞美之词,并希望能够早日试驾一把。

还有网友调侃:
看起来FSD已经准备好迎接挑战了,那么,不来试一把亚洲的终极boss之战吗?

be like this (手动狗头):

值得一提的是,这把直播除了秀特斯拉新版FSD,也是𝕏直播功能的一场压力测试。
至于最终也没打上的“马扎大战”,似乎已经不那么重要了。
马斯克给自己打的圆场是“小扎在这片地区有8000多房产,要是真找到他了我就去挑战”。
参考链接:
[1]https://twitter.com/elonmusk/status/1695247110030119054
[2]https://twitter.com/treb5475/status/1695289700620341311
[3]https://twitter.com/tim_zaman/status/1695488119729238147?s=20
[4]https://www.teslaoracle.com/2023/07/01/teslas-full-self-driving-version-12-will-not-be-beta-says-elon-musk/
— 完 —
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)
④【自动驾驶之心】平台矩阵,欢迎联系我们!

















 1685
1685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









