




 本文介绍了一个使用ROS(Robot Operating System)实现的服务交互示例。该示例包括一个服务端节点和客户端节点,服务端能够接收两个整数并返回它们的和。通过Python脚本实现,展示了如何创建和调用ROS服务。
本文介绍了一个使用ROS(Robot Operating System)实现的服务交互示例。该示例包括一个服务端节点和客户端节点,服务端能够接收两个整数并返回它们的和。通过Python脚本实现,展示了如何创建和调用ROS服务。
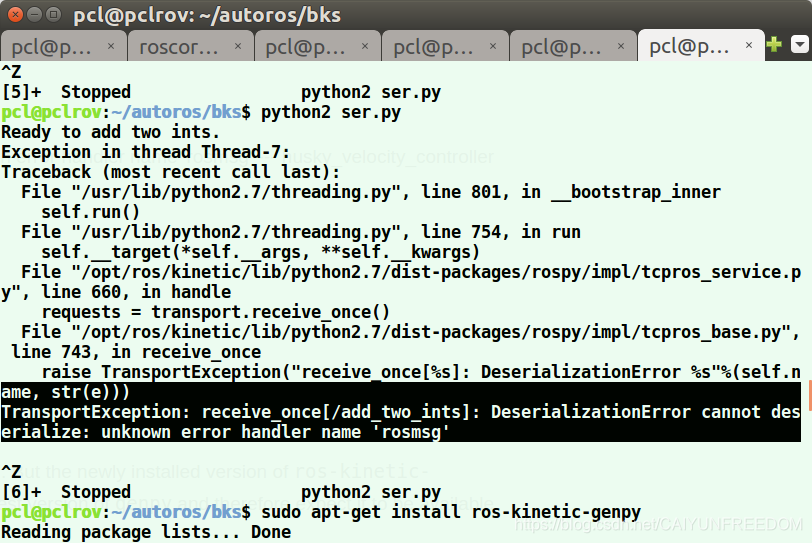
$ sudo apt-get install ros-kinetic-genpy

ser.py
#!/usr/bin/env python
from __future__ import print_function
from rospy_tutorials.srv import *
import rospy
def handle_add_two_ints(req):
print( req)
return req.a+req.b
def add_two_ints_server():
rospy.init_node('add_two_ints_server')
s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints)
print("Ready to add two ints.")
rospy.spin()
if __name__ == "__main__":
add_two_ints_server()cli.py
#!/usr/bin/env python
from __future__ import print_function
import sys
import rospy
from rospy_tutorials.srv import *
def add_two 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1789
1789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









