




 博客讲述了在使用ArduPilot Rover时遇到的电机配置问题,具体表现为在尝试arming时出现`PreArm servo function 3 unassigned`警告。作者发现代码中定义的电机数量与实际电机数量不符,通过调整代码中的 `_motors_num` 为实际电机个数解决了这个问题。此外,还提供了关于Rover电机和伺服函数的链接资源。
博客讲述了在使用ArduPilot Rover时遇到的电机配置问题,具体表现为在尝试arming时出现`PreArm servo function 3 unassigned`警告。作者发现代码中定义的电机数量与实际电机数量不符,通过调整代码中的 `_motors_num` 为实际电机个数解决了这个问题。此外,还提供了关于Rover电机和伺服函数的链接资源。
将frame_class 设置为Rover
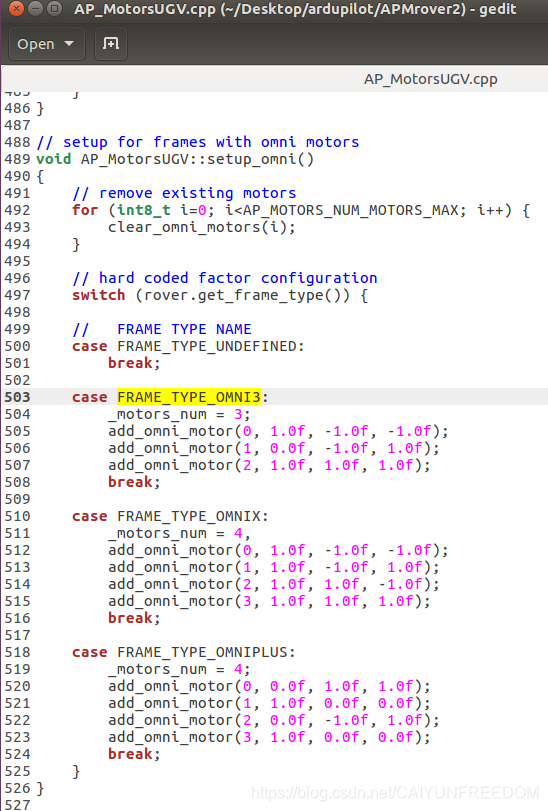
frame_type 相关源码Apmrover2/AP_MotorsUGV.cpp
servofunction
https://ardupilot.org/rover/docs/rover-motor-and-servo-connections.html
- SERVO1_FUNCTION = 73 (Throttle Left)
- SERVO3_FUNCTION = 74 (Throttle Right)
- https://ardupilot.org/rover/docs/parameters-Rover-stable-V4.0.0.html
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1572
1572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









