







 本文详细介绍了Ardurover中rover的控制方式,包括L1控制器如何根据目标点和初始点计算转向,转向和油门控制器的工作原理。此外,还探讨了rover的导航方式,速度控制策略以及如何添加新的控制模式——ARCO模式,该模式结合了GUIDED和MANUAL模式的优点,允许程序直接控制油门加速度。同时,文章还涉及了高级设置如罗盘配置、遥控器重定向等关键参数的调整。
本文详细介绍了Ardurover中rover的控制方式,包括L1控制器如何根据目标点和初始点计算转向,转向和油门控制器的工作原理。此外,还探讨了rover的导航方式,速度控制策略以及如何添加新的控制模式——ARCO模式,该模式结合了GUIDED和MANUAL模式的优点,允许程序直接控制油门加速度。同时,文章还涉及了高级设置如罗盘配置、遥控器重定向等关键参数的调整。
rover的控制方式:
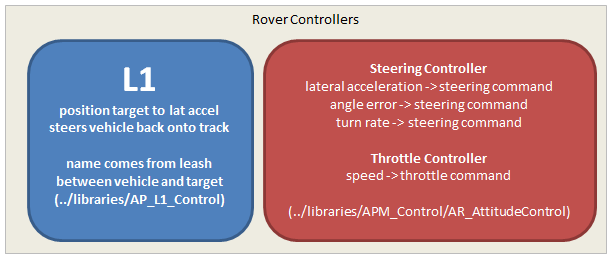
- the L1 controller converts an origin and destination (each expressed as a latitude, longitude) into a lateral acceleration to make the vehicle travel along the path from the origin to the destination. This lateral acceleration is then passed into the steering controller.
先根据目标点和初始点生成转向速度 - the steering controller can convert a desired lateral acceleration, a angle error or a desired turn rate into a steering output command (expressed as a number in the range -4500 to +4500) that should be fed into the motor library (see AR_MotorsUGV.h)
转向控制器能够吧一个期望的侧向加速,角度偏差和期望的转向速度转换成输出的指令,范围子啊-4500~4500之间的数值, - the throttle controller can convert a desired speed into a throttle command (expressed as a number from -100 to +100) that should be fed into the motor libra
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1347
1347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









