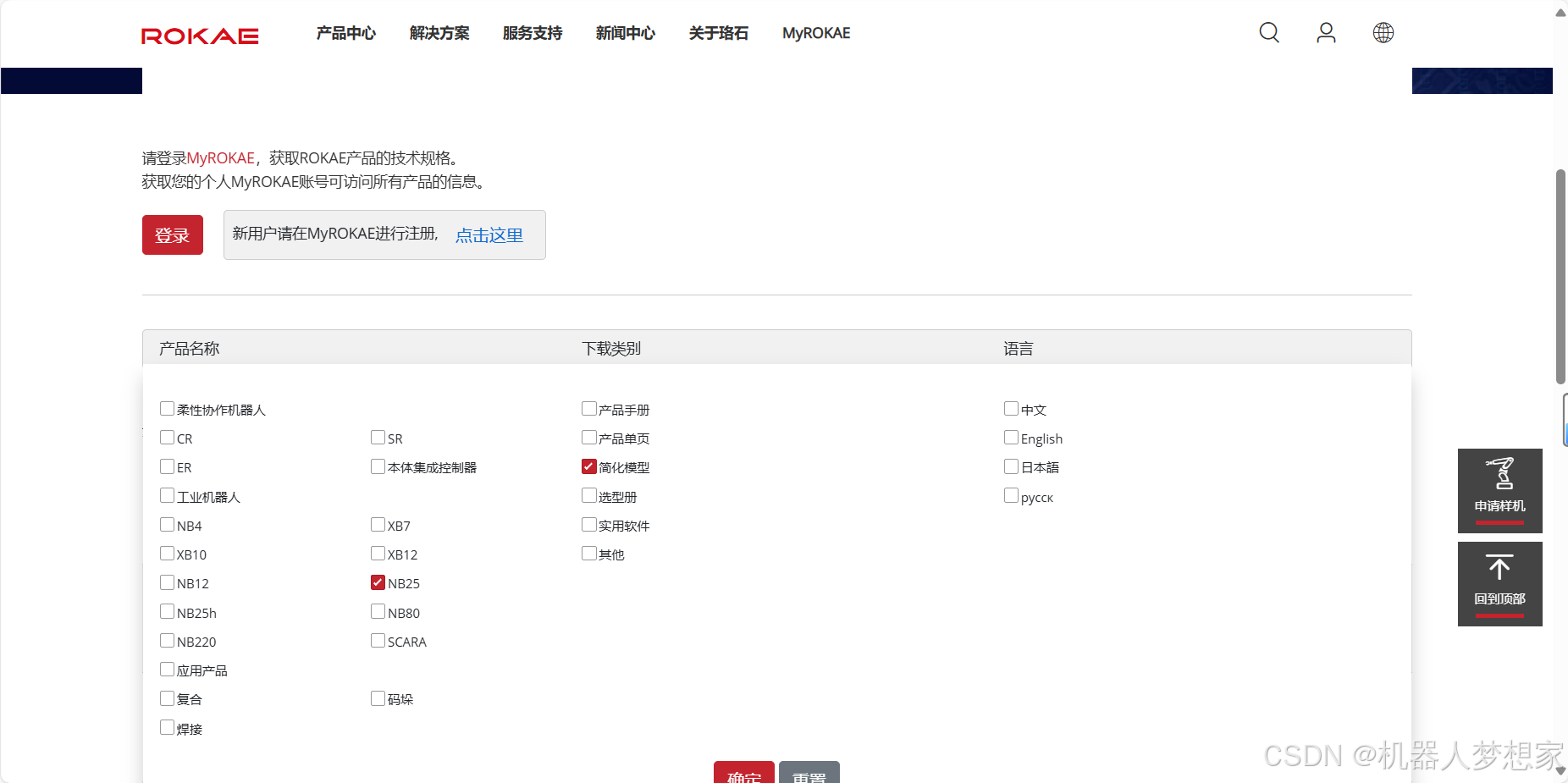
【ROS2实体机械臂驱动】构建珞石NB25-25的moveit2 urdf配置 文章目录 前言 正文 下载相关资料 创建config & description pkg 编辑moveit_description文件夹 编辑moveit_config文件夹 MoveIt Setup Assistant 配置 Launch moveit_setup_assistant 修改自动生成的文件 测试运行 参考 前言 本文用来从零开始配置ROS2 & movit2珞石NB25-25型号的机械臂模型,NB25系列机器人负载能力相比上一代平均提高25%,配合高惯量运动特性,更加适合大惯量、高节拍作业场景。机器人采用全新升级密封设计,手腕可达IP67高防护等级,在严苛环境应用下同样稳定高效1。创建模型大体思路参考博主之前的一篇文章2。 这篇文章与前一篇对比可以完整学习从整体模型开始、拆分零部件、到配置xacro创建一个机械臂实体模型的过程。 正文 下载相关资料









 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 1142
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
1142
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








