




 本文介绍了在Ubuntu18.04上使用ROS和PCL库进行点云数据的读写操作,包括编写`pcd_write.cpp`和`pcd_read.cpp`程序,以及如何在ROS环境中订阅、发布点云消息和使用rviz进行可视化。
本文介绍了在Ubuntu18.04上使用ROS和PCL库进行点云数据的读写操作,包括编写`pcd_write.cpp`和`pcd_read.cpp`程序,以及如何在ROS环境中订阅、发布点云消息和使用rviz进行可视化。
序言
本文是延续Ubuntu18.04 + ROS 下学习点云库PCL的使用(一)的续篇,在上一篇中,我们配置好ROS下PCL的编程环境并成功创建100个无序点云,最后在可视化工具RVIZ成功查看。
今天我们继续PCL的基础学习,通过订阅和发布ros话题,对上面创建的点云进行读写处理。
一、程序文件
1、 “pcd_write.cpp”文件
在之前创建的“pcl_01”功能包的src目录下,新建一个“pcd_write.cpp”文件,将下列代码复制进去。
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/pcd_io.h>
void cloudCB(const sensor_msgs::PointCloud2 &input)
{
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::fromROSMsg(input, cloud);
pcl::io::savePCDFileASCII ("write_pcd_test.pcd", cloud);
}
main (int argc, char **argv)
{
ros::init (argc, argv, "pcl_write");
ros::NodeHandle nh;
ros::Subscriber bat_sub = nh.subscribe("pcl_output", 10, cloudCB);
ros::spin();
return 0;
}2、“pcd_read.cpp”文件
再新建“pcd_read.cpp”文件,将代码复制进去。
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/pcd_io.h>
main(int argc, char **argv)
{
ros::init (argc, argv, "pcl_read");
ros::NodeHandle nh;
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("pcl_output", 1);
sensor_msgs::PointCloud2 output;
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::io::loadPCDFile ("write_pcd_test.pcd", cloud);
pcl::toROSMsg(cloud, output);
output.header.frame_id = "odom";
ros::Rate loop_rate(1);
while (ros::ok())
{
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}3、修改CmakeLists.txt文件
add_executable(pcd_read src/pcd_read.cpp)
add_executable(pcd_write src/pcd_write.cpp)
add_dependencies(pcd_read ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(pcd_write ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(pcd_read
${catkin_LIBRARIES}
)
target_link_libraries(pcd_write
${catkin_LIBRARIES}
)
二、运行程序
首先,开启一个终端启动roscore
roscore然后启动上次的发布点云节点
rosrun pcl_01 pcl_create启动保存点云为pcd文件的节点
rosrun pcl_01 pcd_create这时候会发现,工作空间下多了一个“write_pcd_test.pcd”文件,就是将创建的点云进行保存。
我们可以用PCL tools中的pcl_viewer来查看文件信息,指令为:
pcl_viewer write_pcd_test.pcd结果如下:
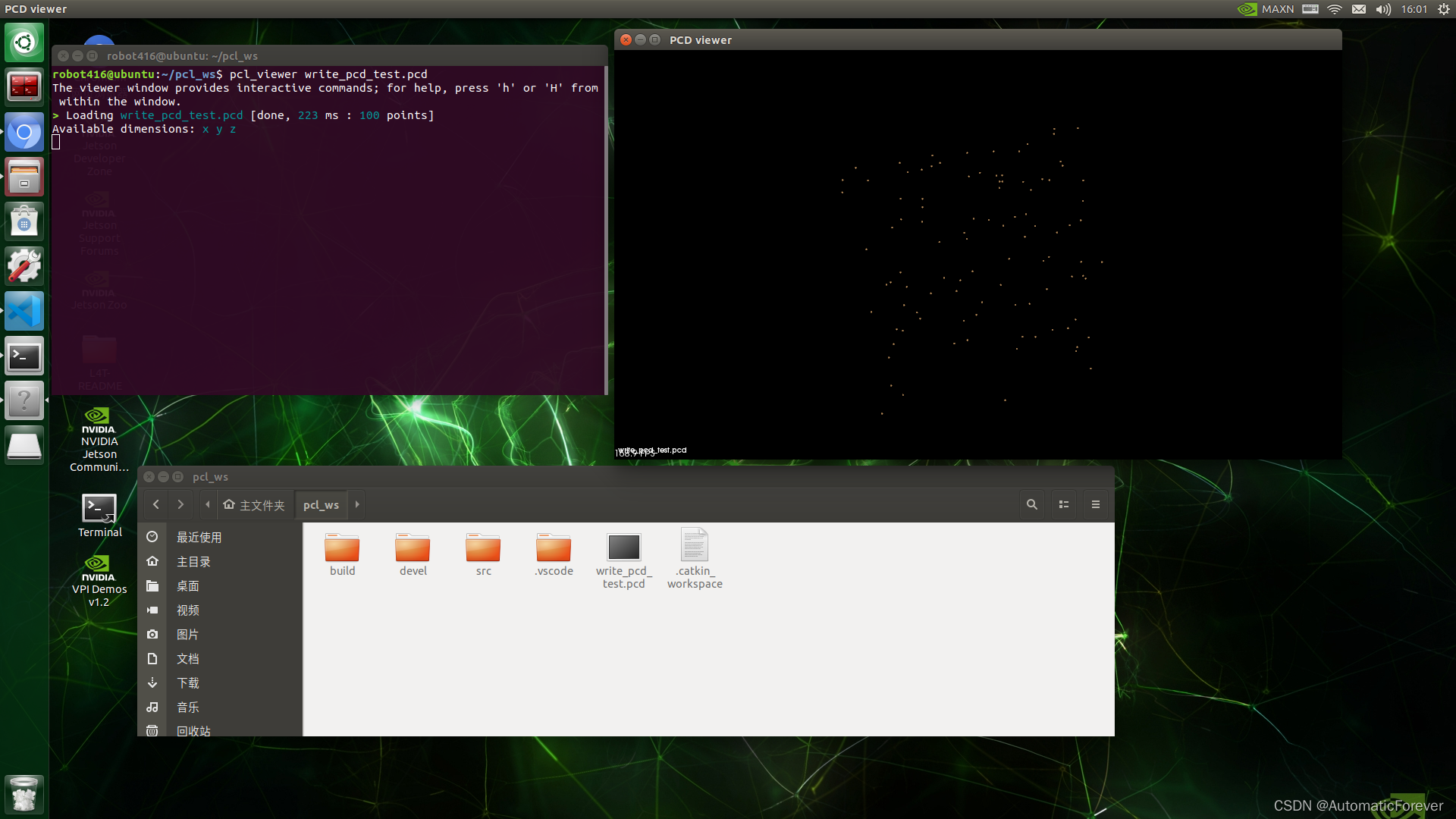
这样即为成功。
这时候,我们关闭pcl_create节点,用pcd_read节点读取pcd文件
rosrun pcl_01 pcd_read功能是把pcd文件的点云信息读取并发布出来,这时我们可以启动rviz来查看,该步骤省略。
总结
今天我们进行的是在ROS下保存和读取点云消息,我们在入门之后,可以利用官方教程进阶,这样学习速度会大大提升。具体每行代码的分析,大家在跑通之后再逐句分析效率会更高。

















 609
609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









