



一.定位模块slam(主要分为以下三大板块)
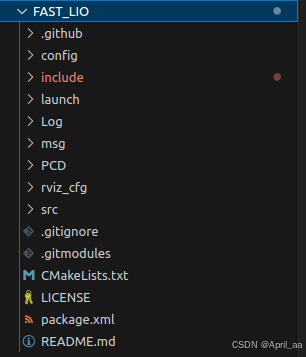
1.github:存放代码仓库地址
config:存放配置文件
include:包含算法核心实现所需的数学工具 数据结构和第三方库
launch:用于存放启动文件(这些文件的作用是批量启动多个 ROS 节点(Nodes)、设置参数、配置话题(Topics)和服务(Services),从而简化复杂系统的启动流程。通过一个命令即可启动整个机器人系统,避免手动逐个运行节点)
log:日志
msg:消息定义文件
PCD:存储点云数据
rviz:三维化可视工具
src:源代码的核心存放位置(IMU_Processing.hpp:IMU 数据预处理与预积分
laserMapping.cpp:激光雷达与 IMU 的紧耦合里程计(LIO)核心算法
preprocess.cpp:点云预处理模块)
gitignore:Git版本控制系统的配置文件(作用是告诉git哪些文件或目录不需要被跟踪)
gitmodules:一个配置文件 存储子模块的配置信息(Git 子模块允许你将一个或多个独立的 Git 仓库嵌入到一个主仓库中,作为子目录存在)
CMakeLists.txt:CMake构建系统的配置文件 用于指导项目的编译和构建流程(它定义了如何将源代码转换为可执行文件或库 并管理依赖关系,编译器选项,平台适配等任务)
package.xml:用于定义和描述一个ROS包的元信息
README.md:是一个使用 Markdown 语法编写的文本文件(用于介绍项目的基本信息、使用方法、安装指南、依赖关系、作者信息等内容。它是项目的“说明书”,帮助开发者、用户或其他相关人员快速了解项目的用途和如何使用它)
-
src与include的协作:-
include目录定义接口和数据结构(如ikd_Tree.h)。 -
src目录实现具体功能(如ikd_Tree.cpp)。
-

















 2941
2941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









