







 本文介绍了使用Open3D库在Python中实现的欧式聚类算法,通过KDTreeFlann对点云进行近邻搜索,对给定的点云数据进行快速聚类,生成具有特定大小限制的簇,并可视化聚类结果。
本文介绍了使用Open3D库在Python中实现的欧式聚类算法,通过KDTreeFlann对点云进行近邻搜索,对给定的点云数据进行快速聚类,生成具有特定大小限制的簇,并可视化聚类结果。
欧式聚类
import open3d as o3d
import numpy as np
def euclidean_cluster(cloud, tolerance, min_cluster_size, max_cluster_size):
"""
欧式聚类
:param cloud:输入点云
:param tolerance: 设置近邻搜索的搜索半径(也即两个不同聚类团点之间的最小欧氏距离)
:param min_cluster_size:设置一个聚类需要的最少的点数目
:param max_cluster_size:设置一个聚类需要的最大点数目
:return:聚类个数
"""
kdtree = o3d.geometry.KDTreeFlann(cloud) # 对点云建立kd树索引
num_points = len(cloud.points)
processed = [-1] * num_points # 定义所需变量
clusters = [] # 初始化聚类
# 遍历各点
for idx in range(num_points):
if processed[idx] == 1: # 如果该点已经处理则跳过
continue
seed_queue = [] # 定义一个种子队列
sq_idx = 0
seed_queue.append(idx) # 加入一个种子点
processed[idx] = 1
while sq_idx < len(seed_queue):
k, nn_indices, _ = kdtree.search_radius_vector_3d(cloud.points[seed_queue[sq_idx]], tolerance)
if k == 1: # k=1表示该种子点没有近邻点
sq_idx += 1
continue
for j in range(k):
if nn_indices[j] == num_points or processed[nn_indices[j]] == 1:
continue # 种子点的近邻点中如果已经处理就跳出此次循环继续
seed_queue.append(nn_indices[j])
processed[nn_indices[j]] = 1
sq_idx += 1
if max_cluster_size > len(seed_queue) > min_cluster_size:
clusters.append(seed_queue)
return clusters
if __name__ == '__main__':
# --------------------------加载点云数据------------------------------
pcd = o3d.io.read_point_cloud("test.pcd")
print(pcd)
# --------------------------快速欧式聚类------------------------------
fec = euclidean_cluster(pcd, tolerance=0.05, min_cluster_size=100, max_cluster_size=500000)
# -------------------------聚类结果分类保存---------------------------
segment = [] # 存储分割结果的容器
print(len(fec))
for i in range(len(fec)):
print(i)
ind = fec[i]
clusters_cloud = pcd.select_by_index(ind)
r_color = np.random.uniform(0, 1, (1, 3)) # 直线点云随机赋色
clusters_cloud.paint_uniform_color([r_color[:, 0], r_color[:, 1], r_color[:, 2]])
segment.append(clusters_cloud)
file_name = "聚类\\cluster_" + str(i + 1) + ".pcd"
o3d.io.write_point_cloud(file_name, clusters_cloud)
# ----------------------------结果可视化------------------------------
o3d.visualization.draw_geometries(segment, window_name="欧式聚类",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=False)
结果:
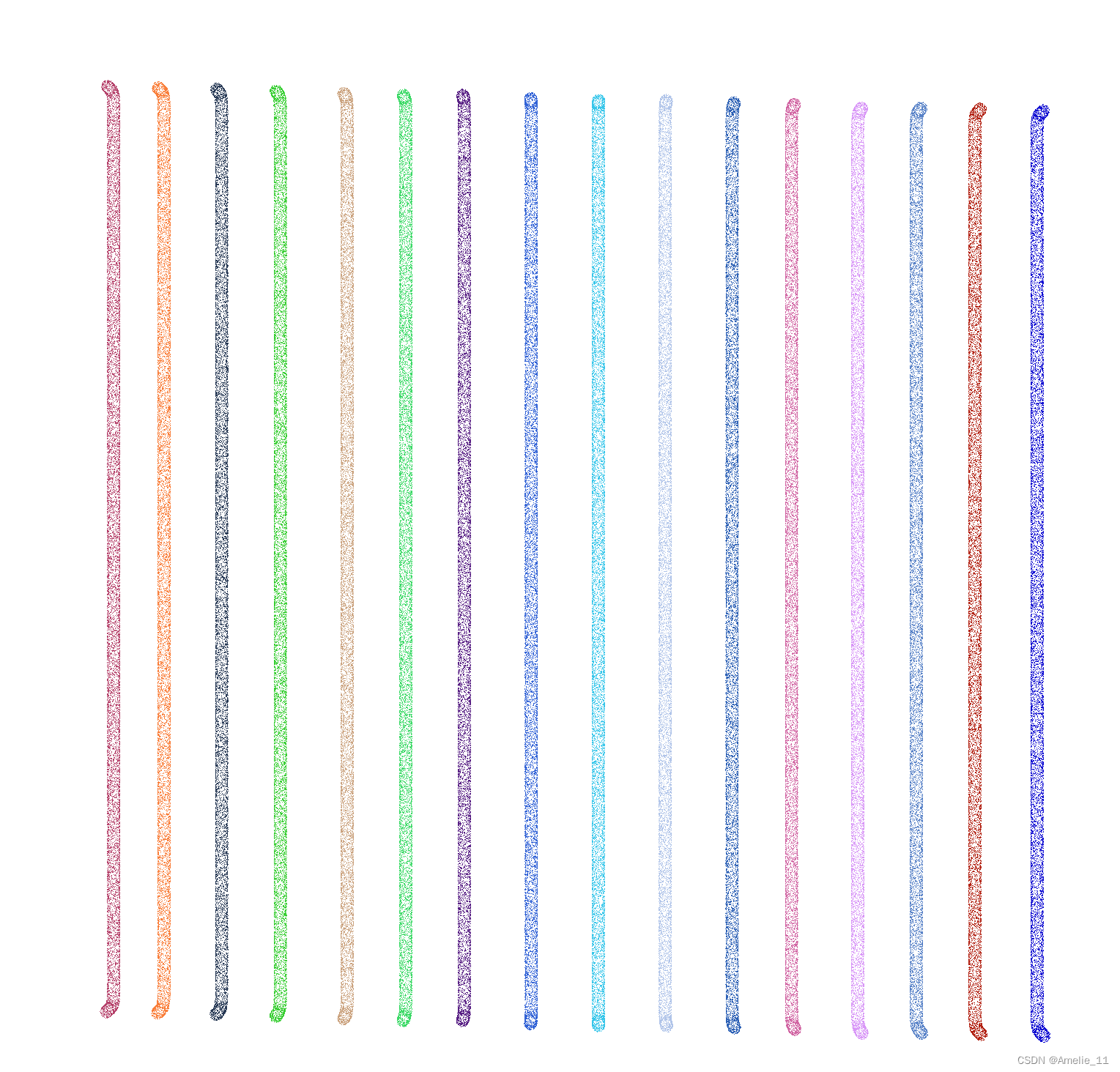
快速欧式聚类
import open3d as o3d
import numpy as np
def fast_euclidean_cluster(cloud, tolerance, max_n, min_cluster_size, max_cluster_size):
num_points = len(cloud.points)
labels = [0] * num_points # initalize all point label as 0
segLab = 1 # Segment label
kdtree = o3d.geometry.KDTreeFlann(cloud) # 建立kd-tree索引
for idx in range(num_points):
if labels[idx] == 0: # if Pi.lable =0
# Pnn = FindNeighbor(pi,dth)
k, nn_indices, _ = kdtree.search_hybrid_vector_3d(cloud.points[idx], tolerance, max_n)
minSegLab = segLab
for j in nn_indices:
# if Nonzero(Pnn.lab)
if (labels[j] > 0) and (labels[j] < minSegLab):
minSegLab = labels[j] # minSegLab = min(N0nzero(Pnn.lab),SegLab)
for j in nn_indices: # foreach pj in Pnn do
tempLab = labels[j]
if tempLab > minSegLab: # if pj.lab > minSeglab then
for k in range(num_points): # foreach pk.lab in P do
if labels[k] == tempLab: # if pk.lab = Pj.lab then
labels[k] = minSegLab # pk.lab = minSegLab
labels[j] = minSegLab # 将所有邻近点分类
segLab += 1
# 根据分类结果对点云附加分类标签
labMap = [[0] * 2 for _ in range(num_points)]
for iv in range(num_points):
labMap[iv][0] = iv
labMap[iv][1] = labels[iv]
labMap = sorted(labMap, key=lambda x: x[1])
# 根据分类标签对点云进行分类
index = 0
allClusters = []
for iv in range(num_points):
seed_queue = [] # 定义一个种子队列
if labMap[iv][1] != labMap[index][1]:
for j in range(index, iv):
seed_queue.append(labMap[j][0])
index = iv
if max_cluster_size > len(seed_queue) > min_cluster_size:
allClusters.append(seed_queue)
return allClusters
if __name__ == '__main__':
# --------------------------加载点云数据------------------------------
pcd = o3d.io.read_point_cloud("test.pcd")
print(pcd)
# --------------------------快速欧式聚类------------------------------
fec = fast_euclidean_cluster(pcd, tolerance=0.08, max_n=1000, min_cluster_size=10, max_cluster_size=50000)
# -------------------------聚类结果分类保存---------------------------
segment = [] # 存储分割结果的容器
print(len(fec))
for i in range(len(fec)):
print(i)
ind = fec[i]
clusters_cloud = pcd.select_by_index(ind)
r_color = np.random.uniform(0, 1, (1, 3)) # 直线点云随机赋色
clusters_cloud.paint_uniform_color([r_color[:, 0], r_color[:, 1], r_color[:, 2]])
segment.append(clusters_cloud)
file_name = "聚类\\cluster_" + str(i + 1) + ".pcd"
o3d.io.write_point_cloud(file_name, clusters_cloud)
# ----------------------------结果可视化------------------------------
o3d.visualization.draw_geometries(segment, window_name="快速欧式聚类",
width=1024, height=768,
left=50, top=50,
mesh_show_back_face=False)
结果
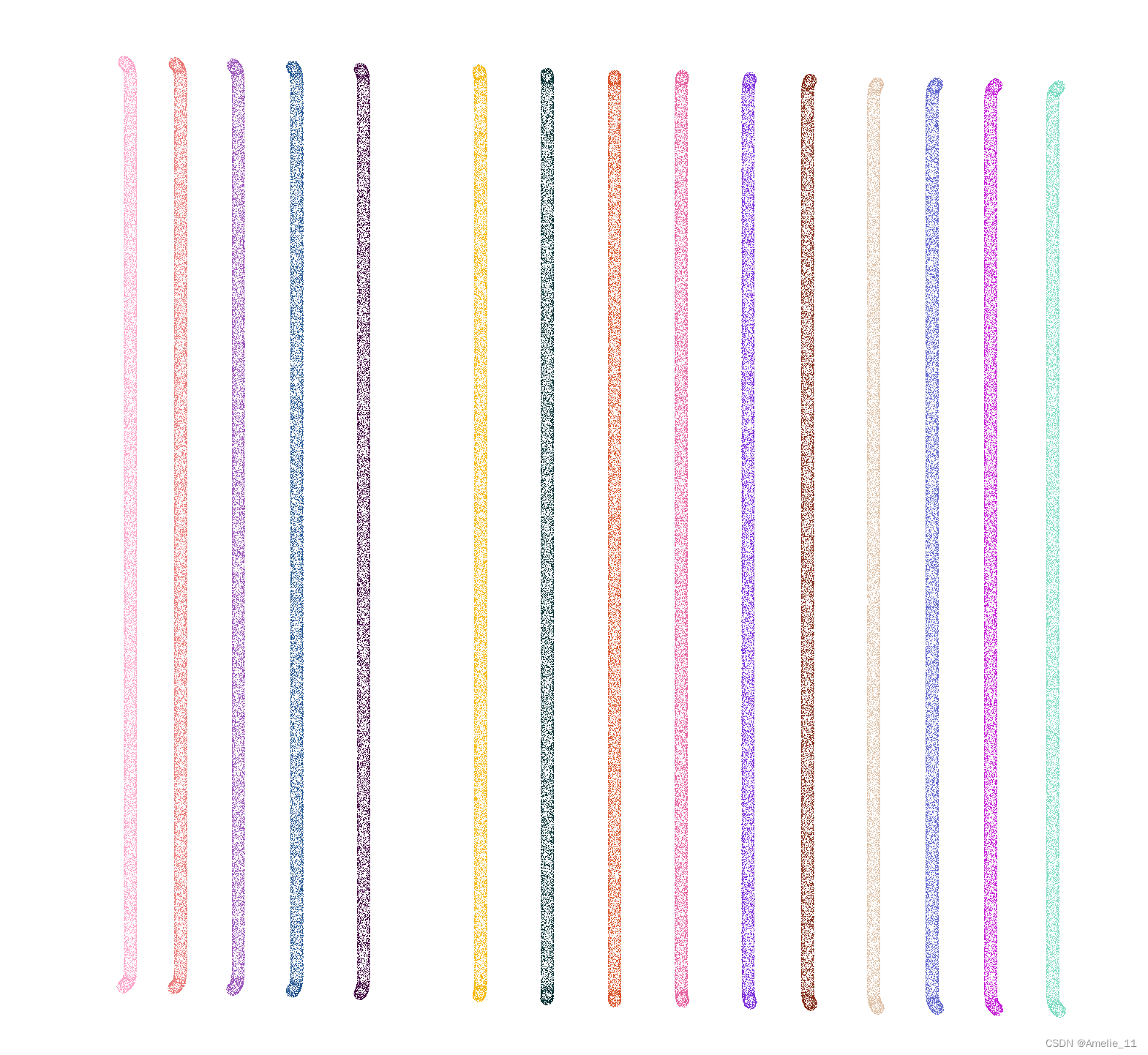
为何少了一条??????????


















 934
934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











