






前言
作为一名从传统行业转行到汽车电子领域的工程师,我曾面临 “不懂硬件、软件、通信,却想学好 AUTOSAR” 的困境。如今通过实战积累了一套零基础可落地的学习方法,同时结合汽车电子核心的知识,整理成这篇指南,希望能帮更多想入门 AUTOSAR 的朋友少走弯路。一起交流方式:AutoButo。

一、我的转行经历:从 “看不到希望” 到 AUTOSAR 开发
毕业初期的困境
第一份工作主要打杂,日常被 “赶报告、写申请书、跑野外苦力” 填满,不仅毫无技术积累,还陷入 “全年单休、工资微薄” 的 PUA 环境 —— 没有技术成长的工作,比生活的苦更让人绝望。
抉择:瞄准新能源汽车赛道
冷静分析后,我认为 “入错行” 是核心问题。对比芯片(专业要求高)和汽车(岗位需求广)行业,新能源汽车当时正处于风口,对跨专业转行更友好。于是决定从 “汽车电子测试岗” 切入,理由是:测试岗门槛相对低,能快速接触行业核心工具和业务。
-
转型的关键:死磕面试 + 主动学习
-
简历修改:找同学优化简历,突出 “学习能力” 和 “行业关注度”,避免空泛描述;
-
面试复盘:每次面试后记录问题,反问面试官 “岗位所需技术栈”(如 Vector 工具、CAN 通信),针对性恶补;
-
从测试到开发:入职后从 “不会用 Vector 工具” 开始,逐步学写测试用例、脚本;接触 “旋变零位角自学习” 等专业名词后,主动查资料、做 demo 项目,最终在 1 年后转入开发岗。
-
二、零基础学 AUTOSAR:先搞懂 “为什么难学”
很多人觉得 AUTOSAR 难,并非因为 “需要嵌入式 / 英文基础”,核心原因有 4 点:
-
学习成本高:需配套 AUTOSAR 环境,个人搭建成本高;
-
行业应用局限:AUTOSAR 源于欧洲,仅用于汽车行业,国内使用人群少;
-
资源稀缺:网上资料多为 “官方文档” 或 “机械流程讲解”,缺乏实战案例;
-
概念抽象:多数资料堆砌 “BswM、PduR、Com” 等术语,初学者学完只记得 “Application Layer-RTE-BSW” 框图,却不懂如何落地。
三、AUTOSAR 实战学习路线:5 步闭环法
学习 AUTOSAR 的核心原则:必须实现 “概念→配置→代码生成→开发板下载→调试” 的闭环,缺一不可。以下以 “配置一帧 CAN 通信” 为例,拆解具体步骤。
-
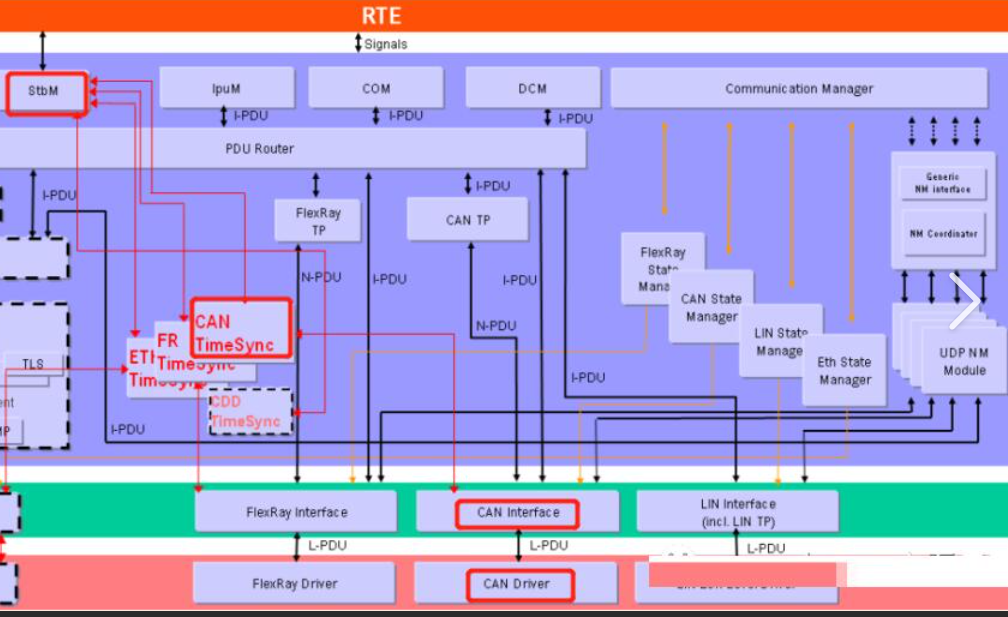
第一步:掌握 CAN 通信基本链路(概念层)
AUTOSAR 中 CAN 通信的精简链路为:RTE → COM → PduR → CanIf → CAN Driver
各模块核心作用(无需死记,先会用再理解):
-
COM 模块:接收应用层信号(Signal),封装为 I-PDU 发送给 PduR;
-
PduR 模块:按协议路由 I-PDU,转发给 CanIf;
-
CanIf 模块:将 I-PDU 转为 L-PDU,传递给 CAN Driver;
-
CAN Driver:底层驱动,实现硬件层面的 CAN 信号发送。
提示:初学者不必纠结 “每个模块的底层原理”,先记住链路对应关系,后续通过配置工具验证。
-
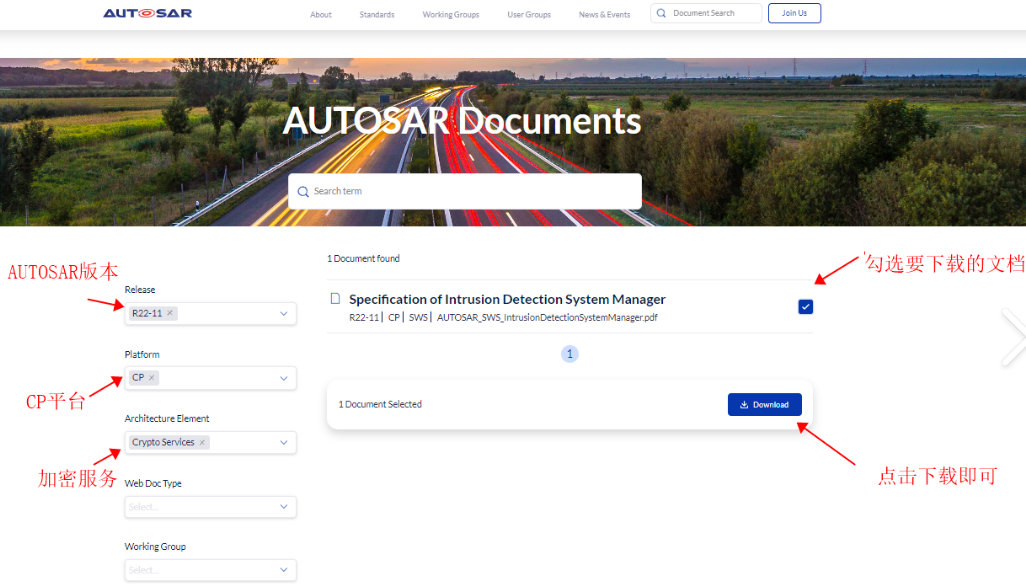
第二步:Davinci 工具配置(实操层)
以 Vector 的 Davinci CFG 工具为例,核心操作如下:
-
新建工程,导入提前配置好的
CAN.dbc文件(包含 CAN 信号、ID 等定义); -
若涉及多 ECU,选择当前需配置的 ECU(如 “MyECU”);
-
按 “CAN 通信链路” 配置模块:依次找到 COM、PduR、CanIf、CAN Driver 模块,根据 dbc 文件参数设置信号映射、路由规则等;
-
配置完成后,保存工程并检查无报错。
-

-
第三步:代码生成(工具自动 + 手动补充)
AUTOSAR 的代码生成以 “工具自动为主,手动补充为辅”:
-
自动生成部分:MCAL(微控制器抽象层)、BSW(基础软件)、RTE(运行时环境)代码,由 Davinci/ETAS 等工具生成,保存在
GenData文件夹中(如Can_Lcfg.c、Com_Lcfg.c); -
手动补充部分:ASW(应用层软件)的算法逻辑(如控制策略),可通过 Simulink/MBD 建模生成,或根据需求手写 C 代码;复杂驱动代码需结合芯片 Datasheet 编写。
-
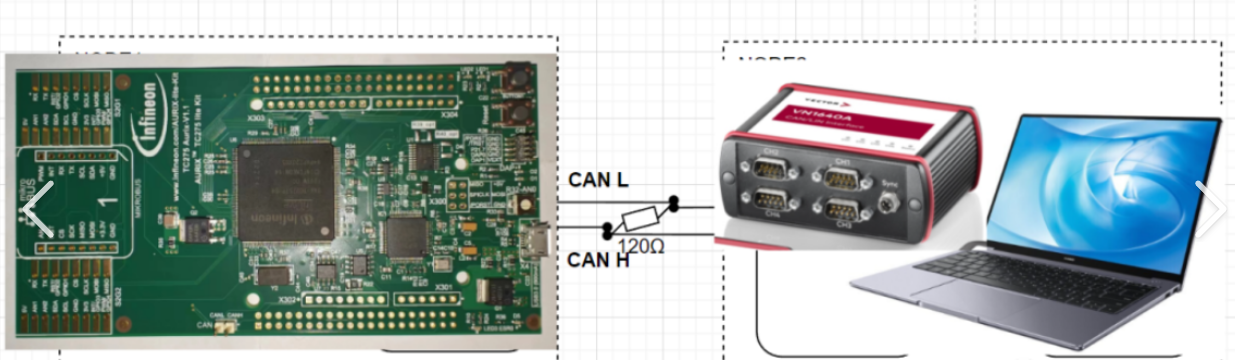
 第四步:开发板下载与调试(验证层)
第四步:开发板下载与调试(验证层)
-
将生成的代码通过调试器(如 J-Link)下载到开发板(需匹配 ECU 硬件);
-
连接 CAN 盒(如 Vector VN1630),通过 CANoe 软件监控 CAN 总线;
-
触发 CAN 信号发送(如模拟传感器数据),在 CANoe 中查看信号是否正常接收,若异常则排查模块配置或代码逻辑。
-
-
第五步:进阶学习(模块扩展)
入门后针对具体模块(如 UDS 诊断、OS 操作系统、MCAL),重复 “理论→配置→代码→调试” 流程,例如:
-
学 UDS 诊断:先理解 ISO 14229 协议,再用 Davinci 配置 Dcm 模块,生成代码后通过 CANoe 发送诊断请求验证;
-
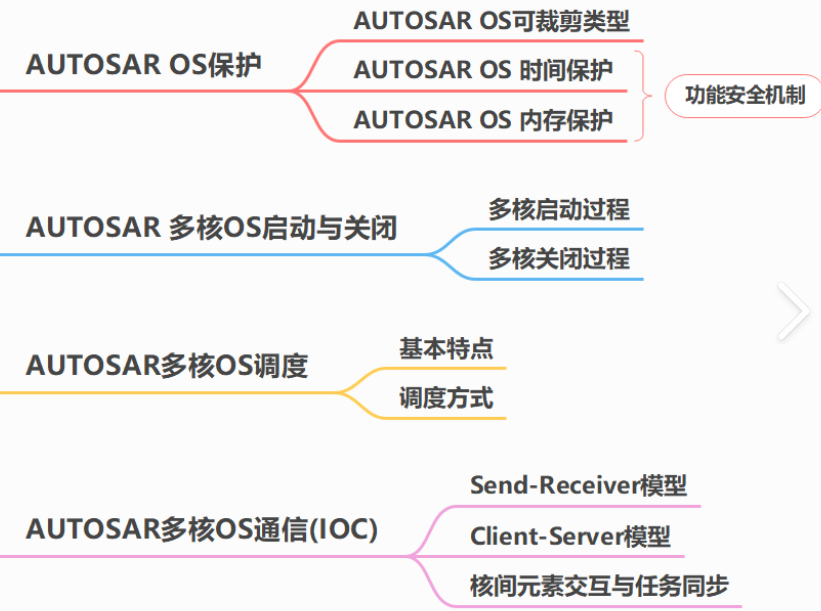
学 OS:重点掌握任务调度、中断管理,通过工具配置 OS 核心参数,在开发板上验证任务运行时序。
-
四、AUTOSAR 角色定位:学什么取决于 “你想做什么”
AUTOSAR 规范虽厚(打印后超 2 米),但无需全学,需根据 “职业角色” 聚焦重点:
-
整车厂 OEM(主机厂)
核心场景:整车 E/E 架构设计、应用层 SWC(软件组件)设计需掌握:AUTOSAR 方法论、SWC 拆分与接口定义、E/E 架构拓扑设计。
-
零部件 Tier1
按岗位细分学习重点:
| 岗位 | 核心学习内容 |
| 架构工程师 | AUTOSAR 方法论、SWC 设计技巧、E/E 架构落地 |
| 算法工程师 | SWC 设计、Simulink/MBD 建模、控制算法实现 |
| 底层芯片驱动工程师 | MCAL 模块(如 GPIO、CAN、ADC)配置与调试 |
| BSW 协议栈工程师 | OS、ComStack(通信栈)、DiagStack(诊断栈)等 |
| 集成工程师 | RTE 集成、软件版本管理、整车功能联调 |
五、Classic AUTOSAR vs Adaptive AUTOSAR:先学哪个?
-
两者区别与适用场景
| 类型 | 适用场景 | 核心特点 | 基础要求 |
| Classic AUTOSAR(CP) | 实时控制、资源有限的 ECU(如传感器、执行器控制器) | 静态配置、实时性高 | C 语言、CAN 通信 |
| Adaptive AUTOSAR(AP) | 高算力 ECU(如域控制器、车载电脑)、车联网 / 自动驾驶 | 动态部署、SOA 架构、高吞吐 | Linux、C++、SOME/IP |
-
学习建议
-
零基础优先学Classic AUTOSAR:原理更基础,工具生态成熟,学会后可快速落地项目;
-
进阶学Adaptive AUTOSAR:需先掌握 Classic AUTOSAR,再补充 Linux(如进程管理、网络配置)、C++(如面向对象编程)、SOME/IP 协议知识,重点理解 SOA 架构的服务调用逻辑。
六、CAN 通信基础:AUTOSAR 的 “必学前置知识”
CAN 是汽车电子的核心通信协议,也是 AUTOSAR 配置的基础,需掌握以下要点:
-
CAN 概要规格(ISO 11898-2)
| 项目 | 参数 / 特性 |
| 网络配置 | 多主竞争式(CSMA/CA) |
| 通信速度 | 最高 1Mbps(高速 CAN) |
| 传输类型 | 2 线制(CANH、CANL 双绞线) |
| 传输方式 | 半双工 |
| 同步方式 | Recessive(隐性,逻辑 1)→ Dominant(显性,逻辑 0)时同步 |
| 核心优势 | 抗干扰强、支持错误检测 / 恢复、节点扩展灵活 |
-
CAN 核心特性
-
线型总线拓扑:所有 ECU(节点)挂在一条总线上,可灵活添加 / 删除节点;
-
多主竞争:总线空闲时任意节点可发送数据,优先级由 ID 决定(ID 越小优先级越高);
-
差分电压传输:CANH 与 CANL 的电压差表示逻辑(显性:电压差约 2V;隐性:电压差 0V),抗干扰能力强;
-
错误检测:所有节点实时检测总线错误(如位错误、CRC 错误),检测到错误后立即通知其他节点,发送节点会重发数据。
-
CAN 数据帧格式
CAN 数据帧分 “标准格式”(11 位 ID)和 “扩展格式”(29 位 ID),标准格式更常用,结构如下:
| 字段 | 位数 | 作用 |
| SOF | 1bit | 帧起始(显性位) |
| Arbitration Field | 12bit | 仲裁区(11bit Base ID + 1bit RTR,RTR=0 表示数据帧) |
| Control Field | 6bit | 控制区(1bit IDE=0 表示标准格式 + 1bit FDF + 4bit DLC) |
| Data Field | 0~64bit | 数据区(最多 8 字节,CAN FD 支持 64 字节) |
| CRC Field | 16bit | 校验区(15bit CRC + 1bit CRC 界定符) |
| ACK Field | 2bit | 确认区(1bit ACK 位 + 1bit ACK 界定符) |
| EOF | 7bit | 帧结束(隐性位) |
七、结语
AUTOSAR 的学习核心是 “实战闭环”—— 别被厚厚的规范或抽象术语吓住,从 “配置一帧 CAN 通信” 开始,逐步积累模块经验。我从 “零基础转行” 到掌握 AUTOSAR,靠的就是 “每学一个知识点,就落地一个小项目”。
如果在学习中遇到工具配置、代码调试问题,欢迎留言交流;也可关注我的后续文章,会持续更新 AUTOSAR 各模块的实战教程。
最后送一句话:汽车电子行业虽有门槛,但风口下的机会更多 —— 只要你愿意从 “小项目” 开始,坚持落地,终会突破零基础的瓶颈。

















 11万+
11万+



 到【灌水乐园】发言
到【灌水乐园】发言








