






概要
文件名称:ADC转换实验
实验目的:1.掌握I2C总线通讯基本特点和工作时序
2.掌握51单片机模拟I2C总线时序的程序设计方法
3.掌握PCF8591 DAC芯片的操作方法
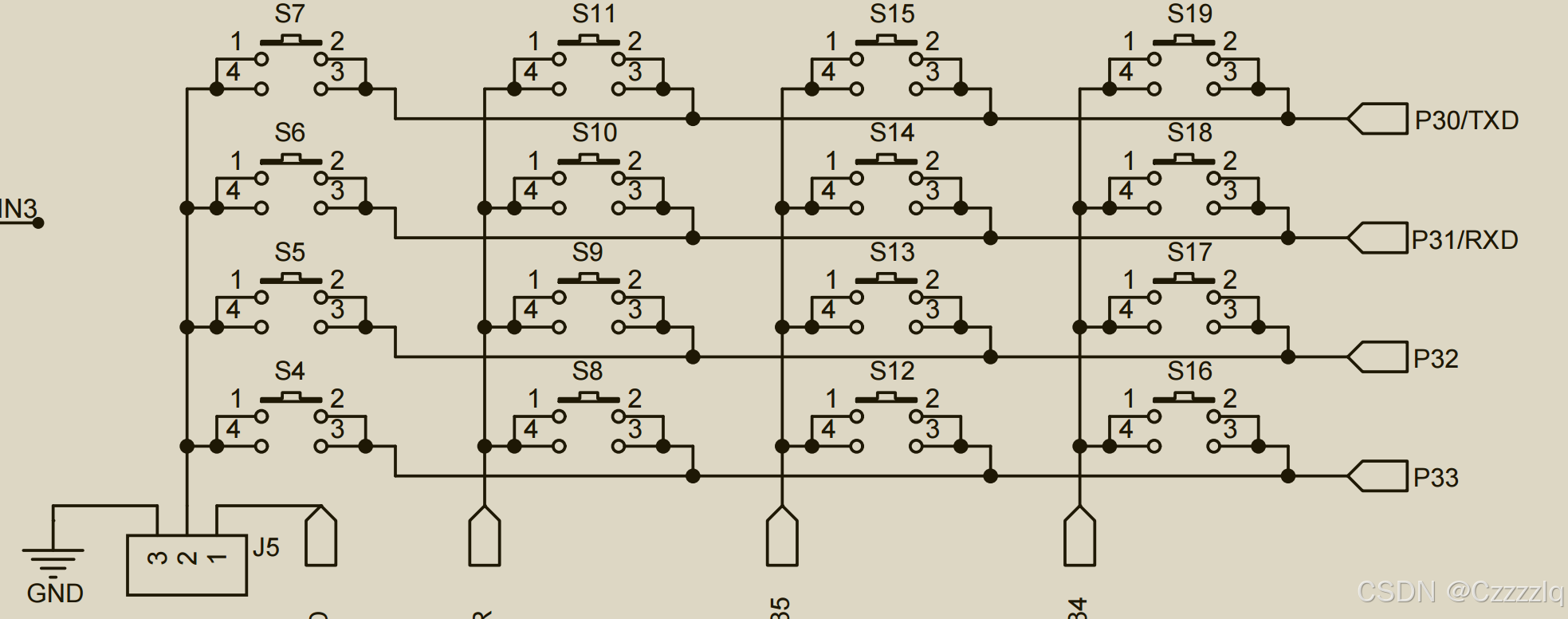
实验配置:J3跳线配置为IO方式,J5配置为BTN、J2配置为1-3和2-4
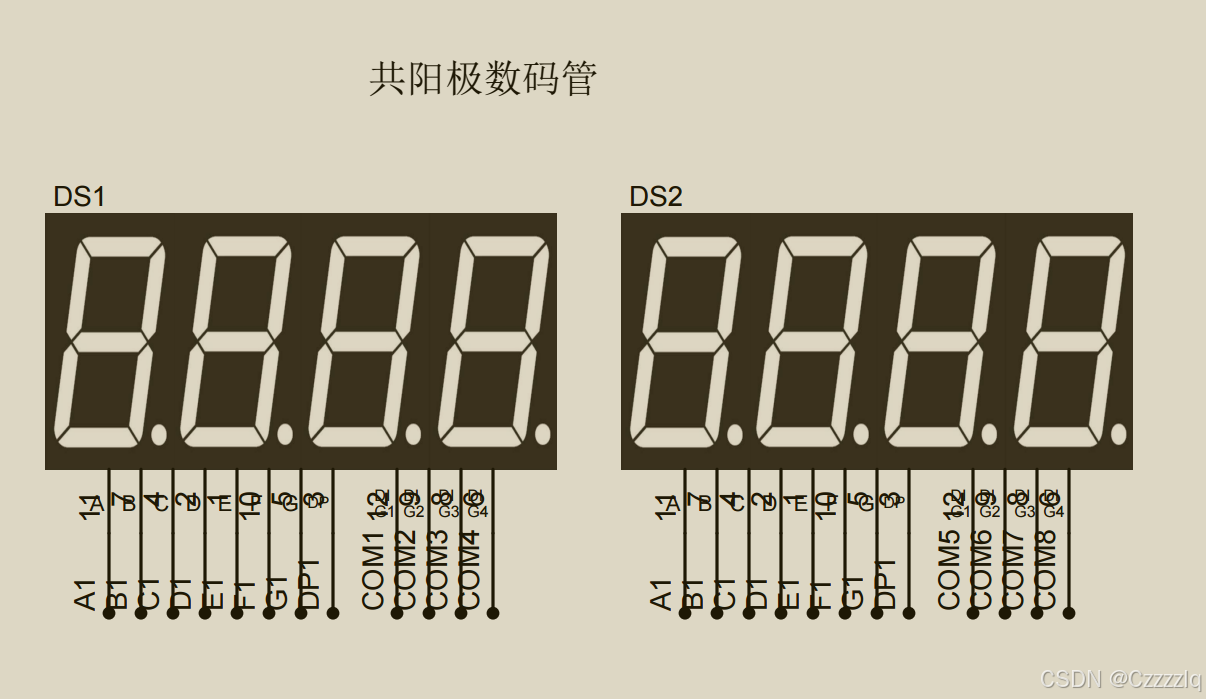
程序现象:1.AD转换实验中旋转电位器,数码管显示数字在0~255之间进行变化
2.DA转换实验中按下按键S7和S6,数码管显示数字在0~255之间进行变化
硬件环境:IAP15F2K61S2@11.0592MHz
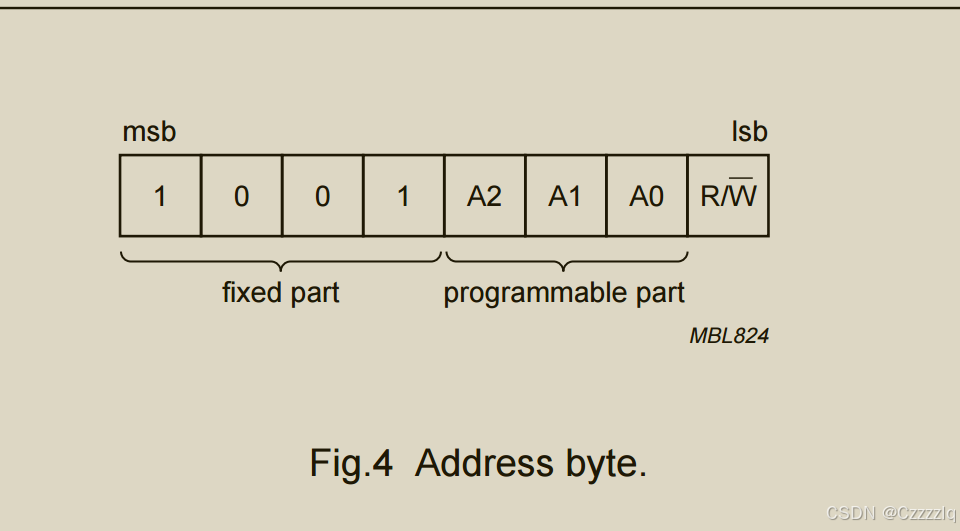
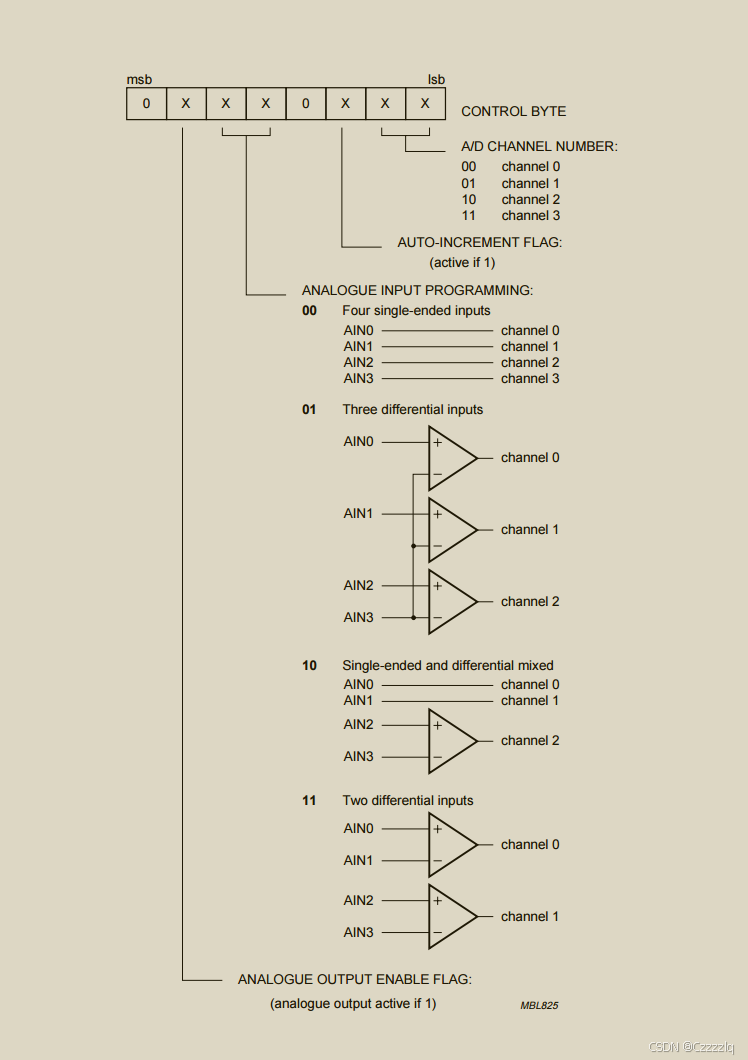
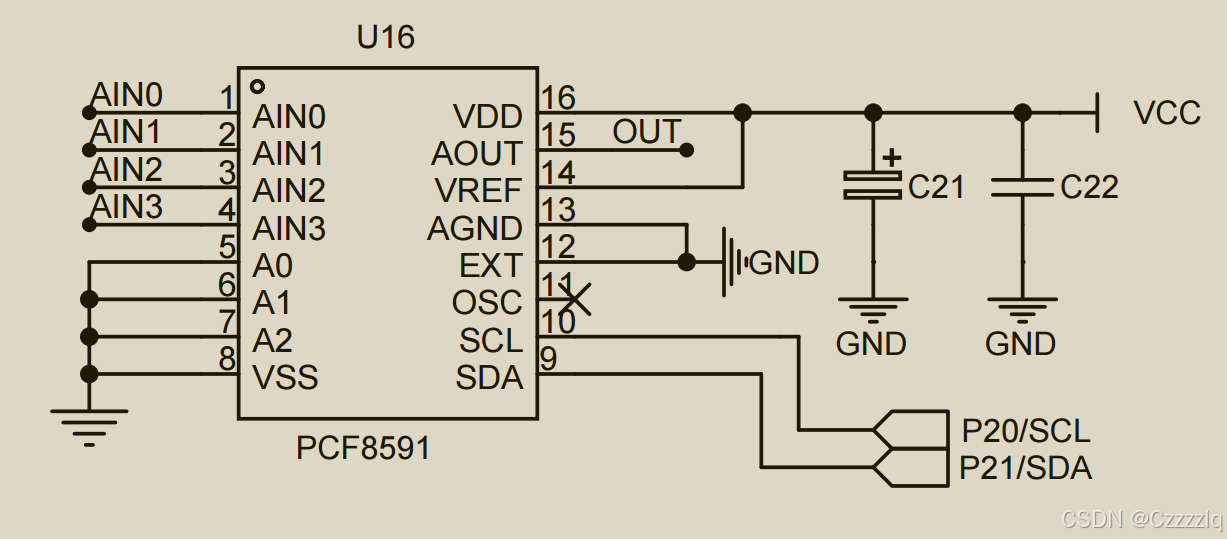
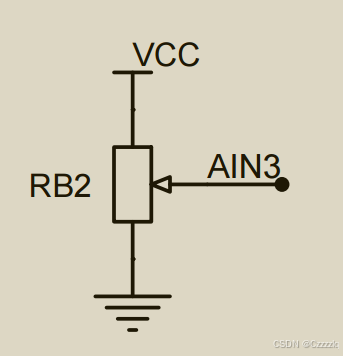
实验原理:1.PCF8951A/D实验:通过设置PCF8951通讯时序中的 Control Byte选择A/Dchannel和ANALOG INPUT PROGRAMMIG,读取电压模拟量,通过PCF8951芯片转化成数字量,通过电位器控制模拟量的大小从而控制现实的数字量。
2.PCF8951D/A实验:通过设置PCF8951通信时序中的Control Byte字节将ANAOG OUTPUT ENABLE FLAG置1,按键控制数字量的大小,S7是数字量增大,S6使数字量减小,通过PCF8951将数字量转化为模拟量,将数字量和模拟量显示在数码管上
技术实现
1.硬件部分
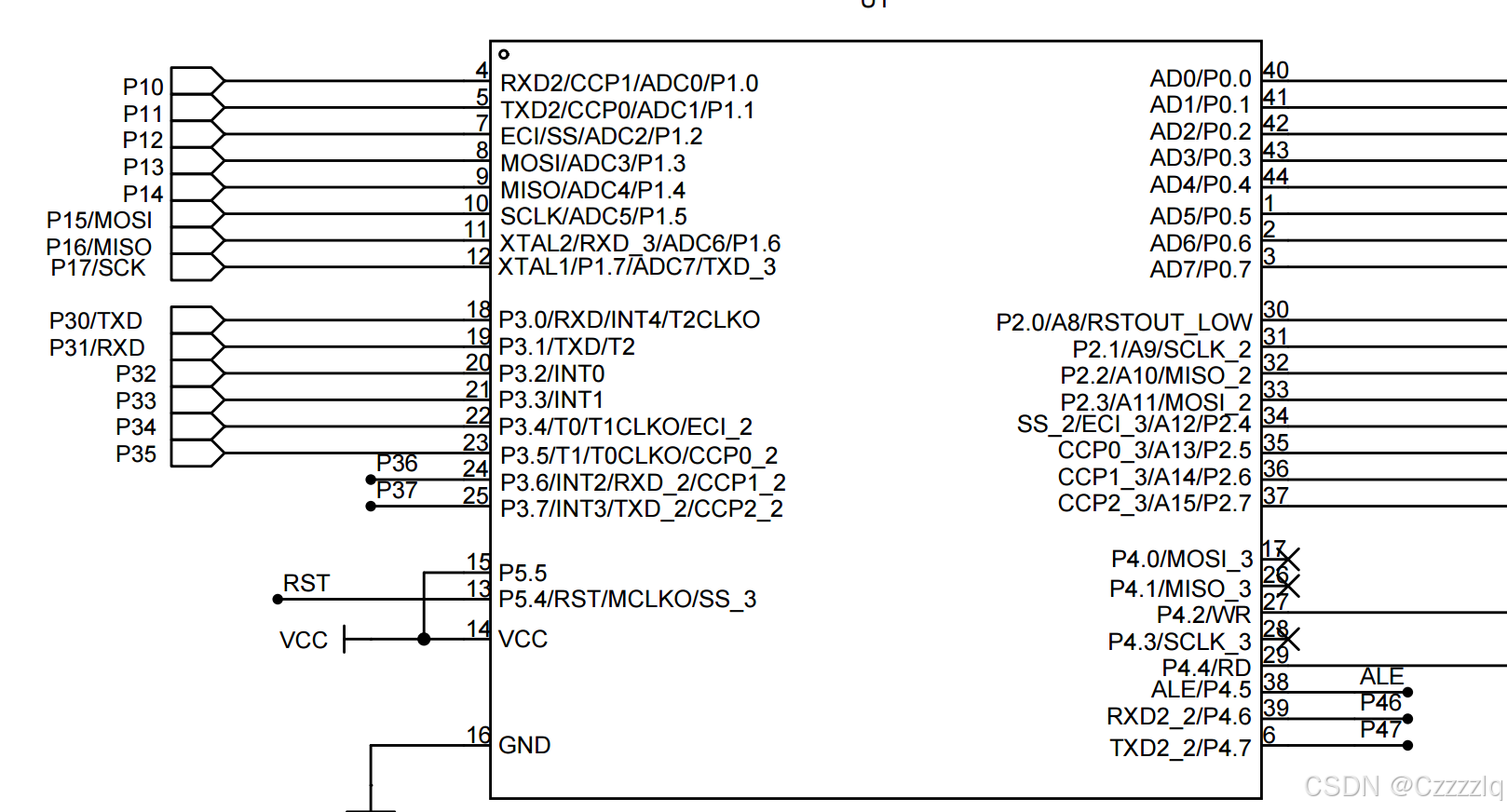
1.IAP15F2K61S2单片机
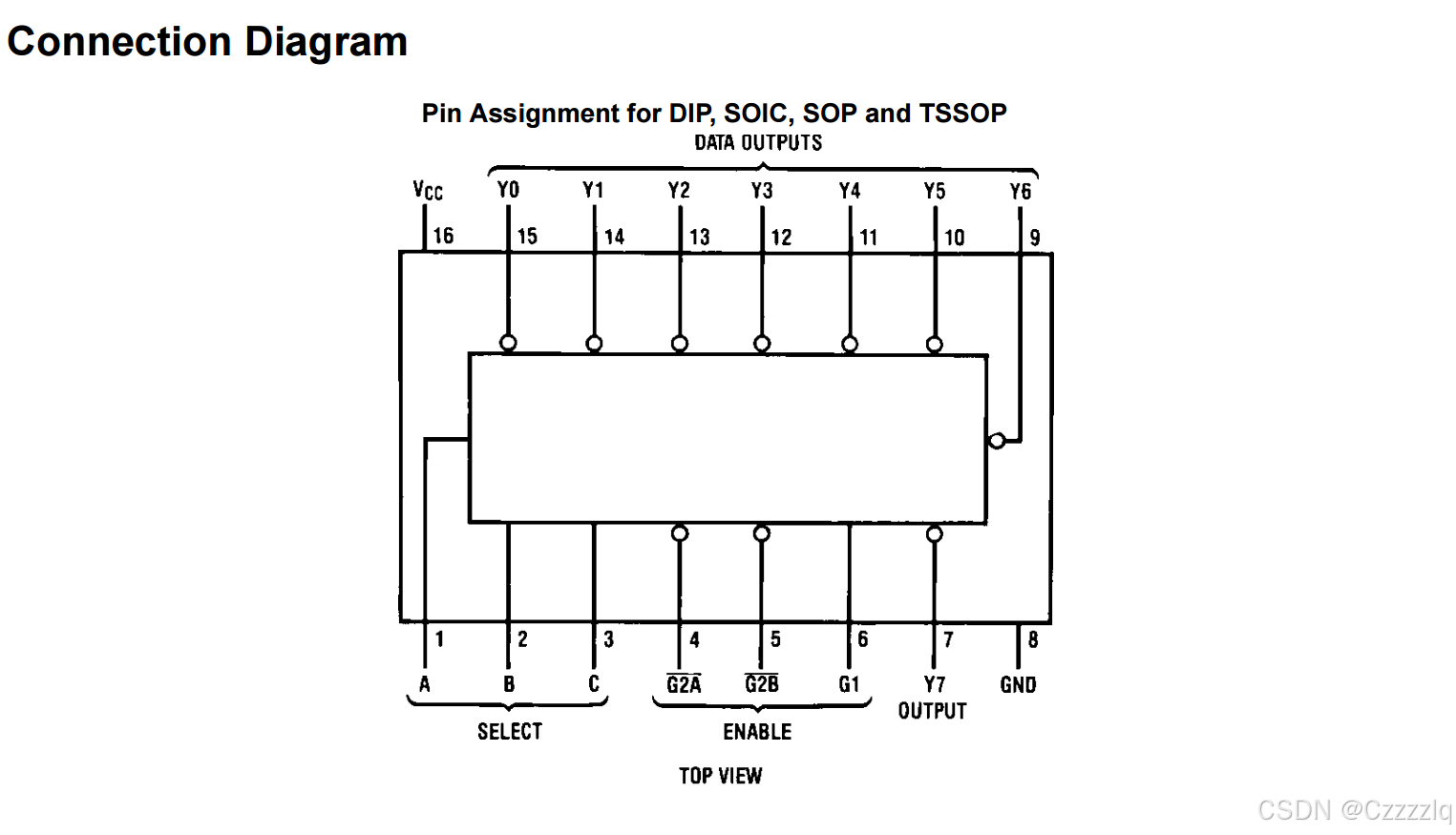
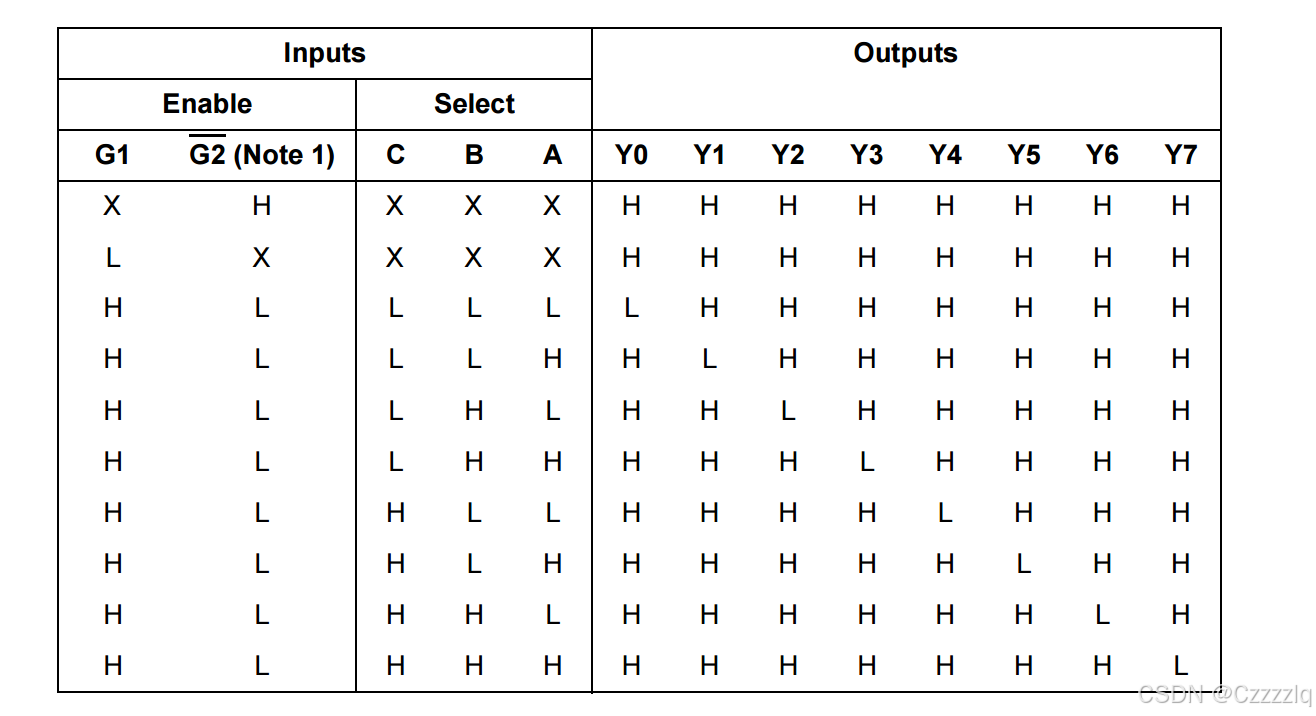
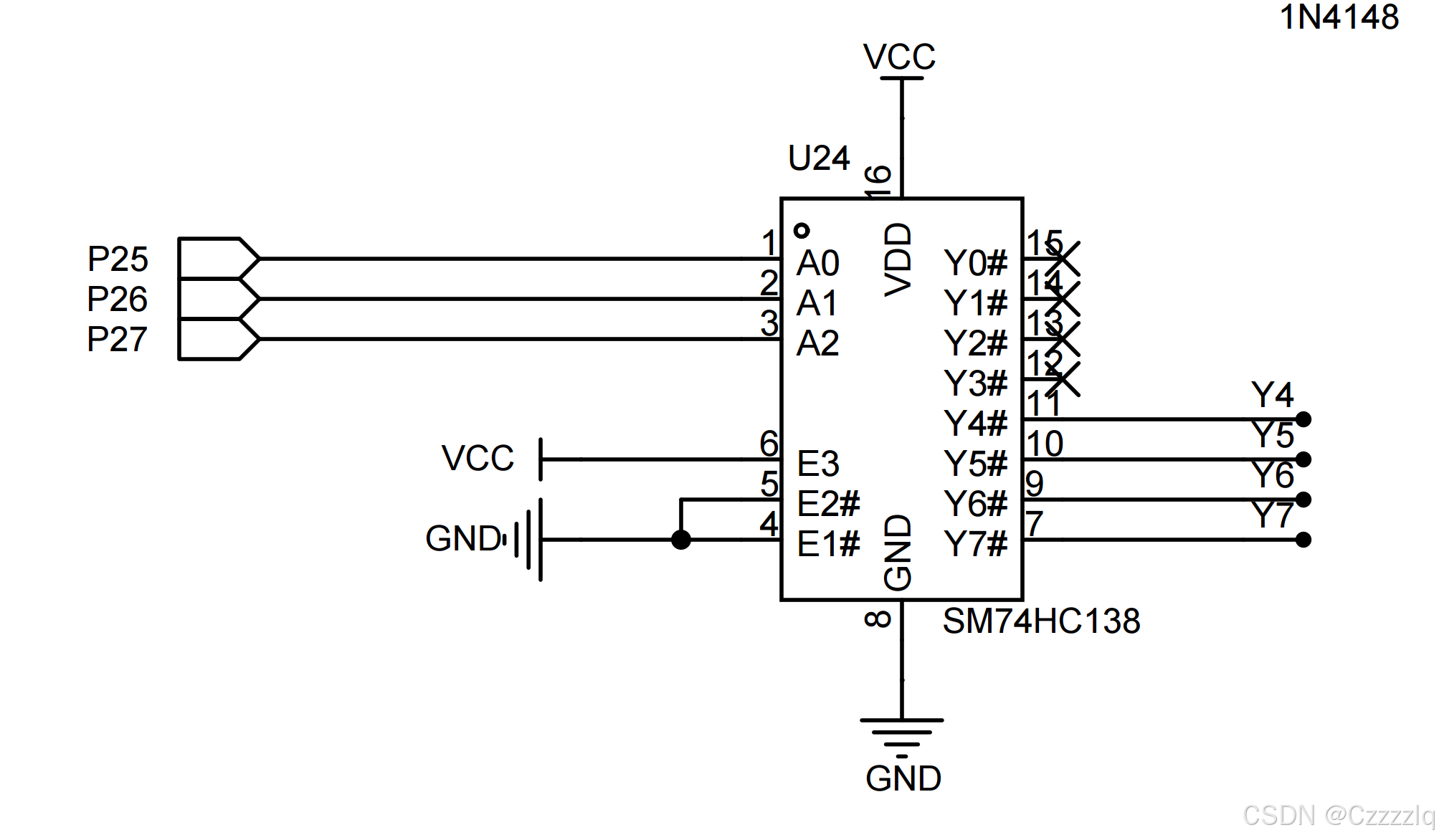
2.74HC138(译码器 )
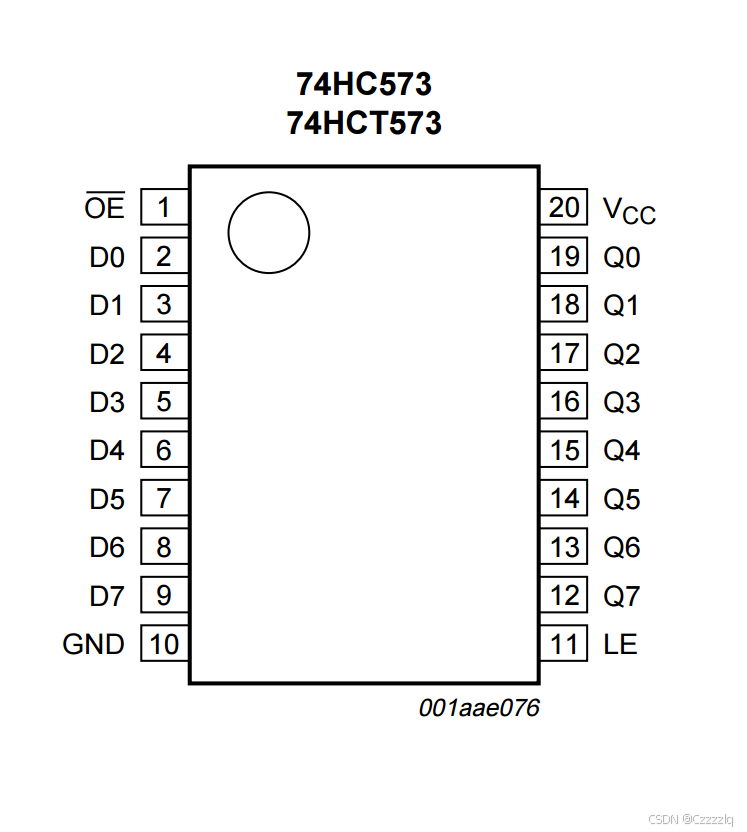
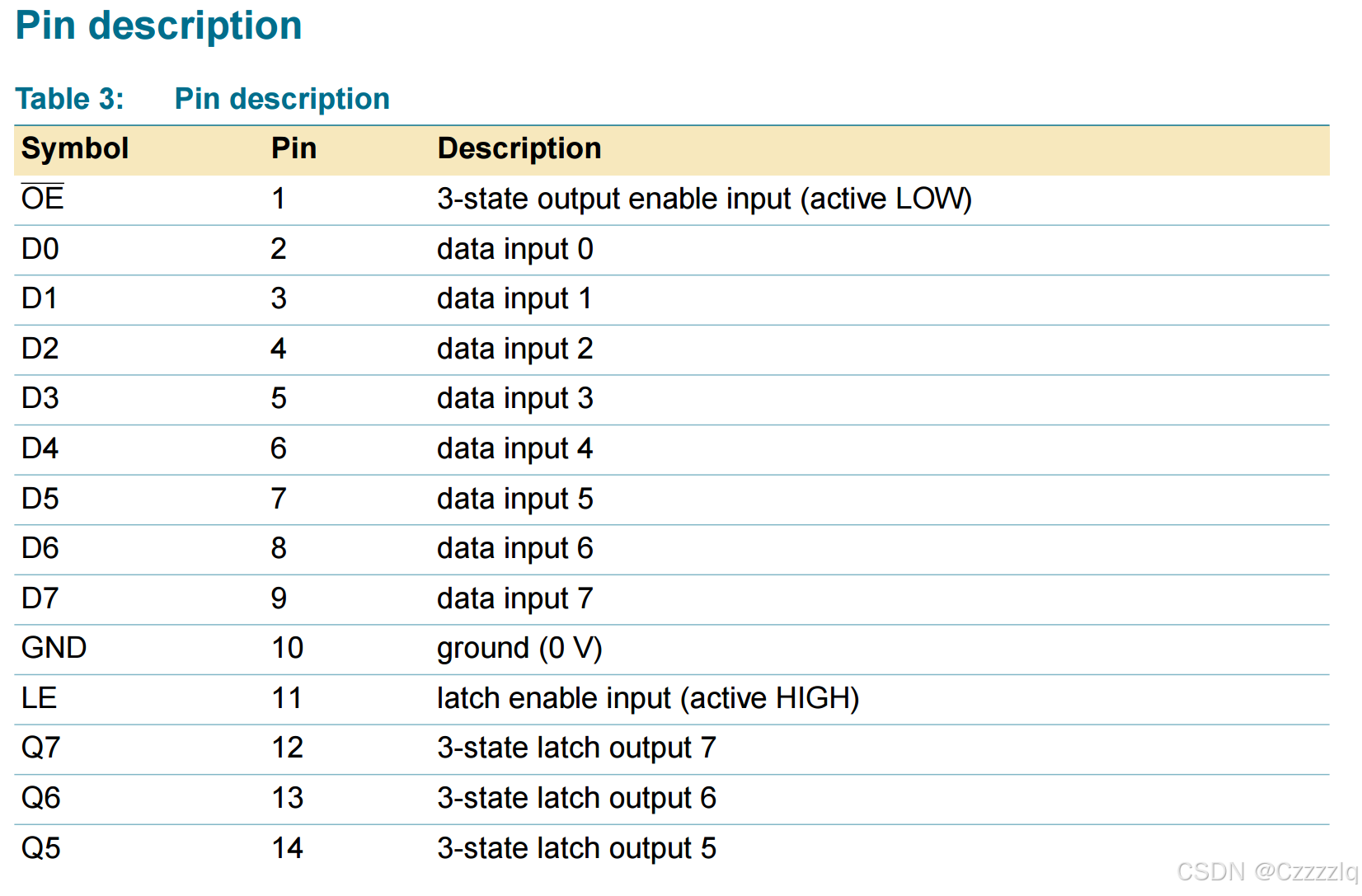
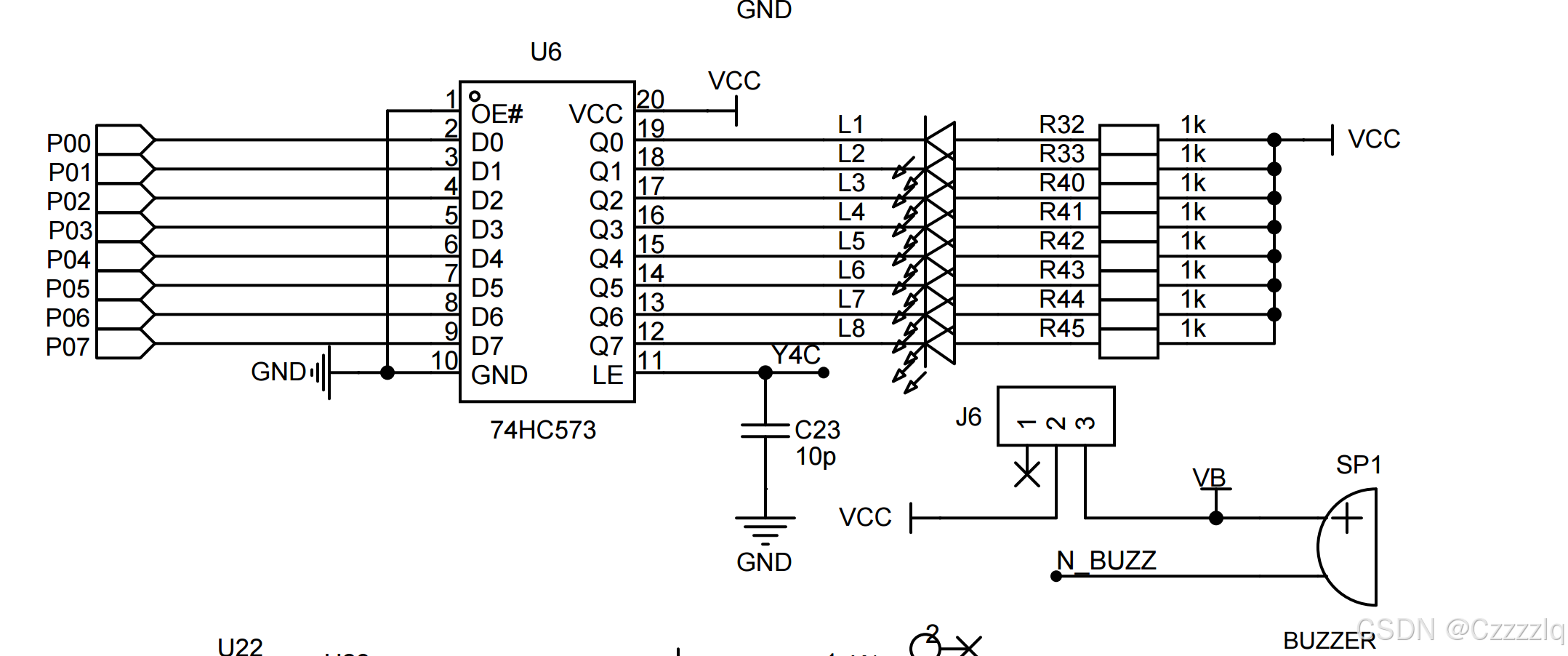
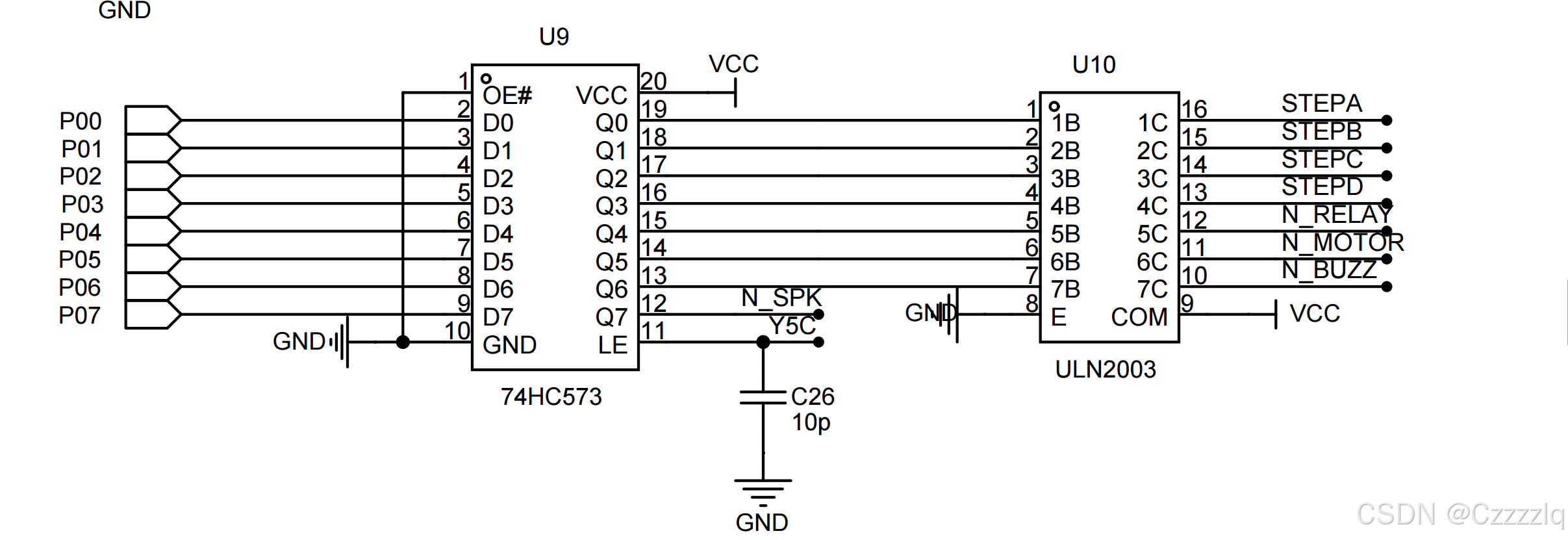
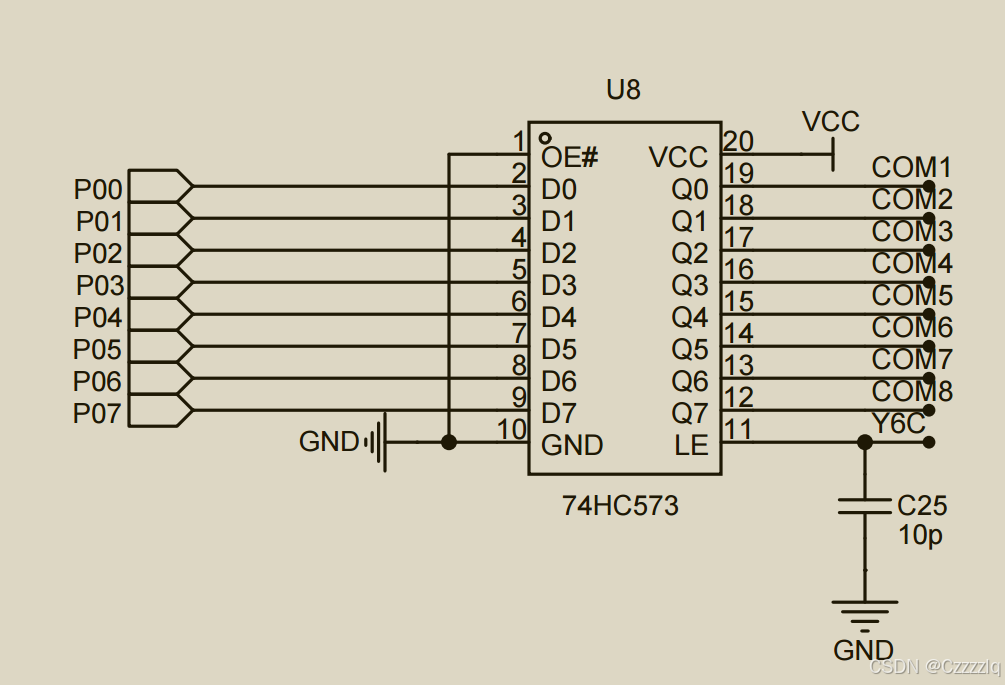
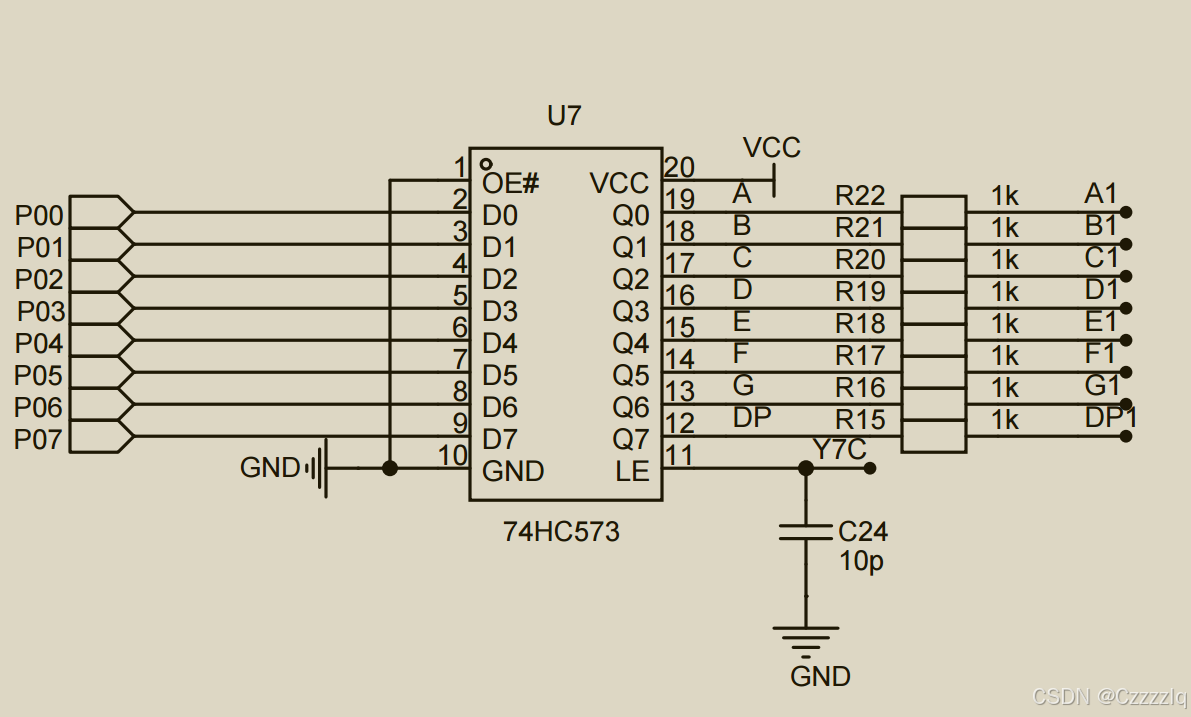
 3.74HC573(锁存器 )
3.74HC573(锁存器 )
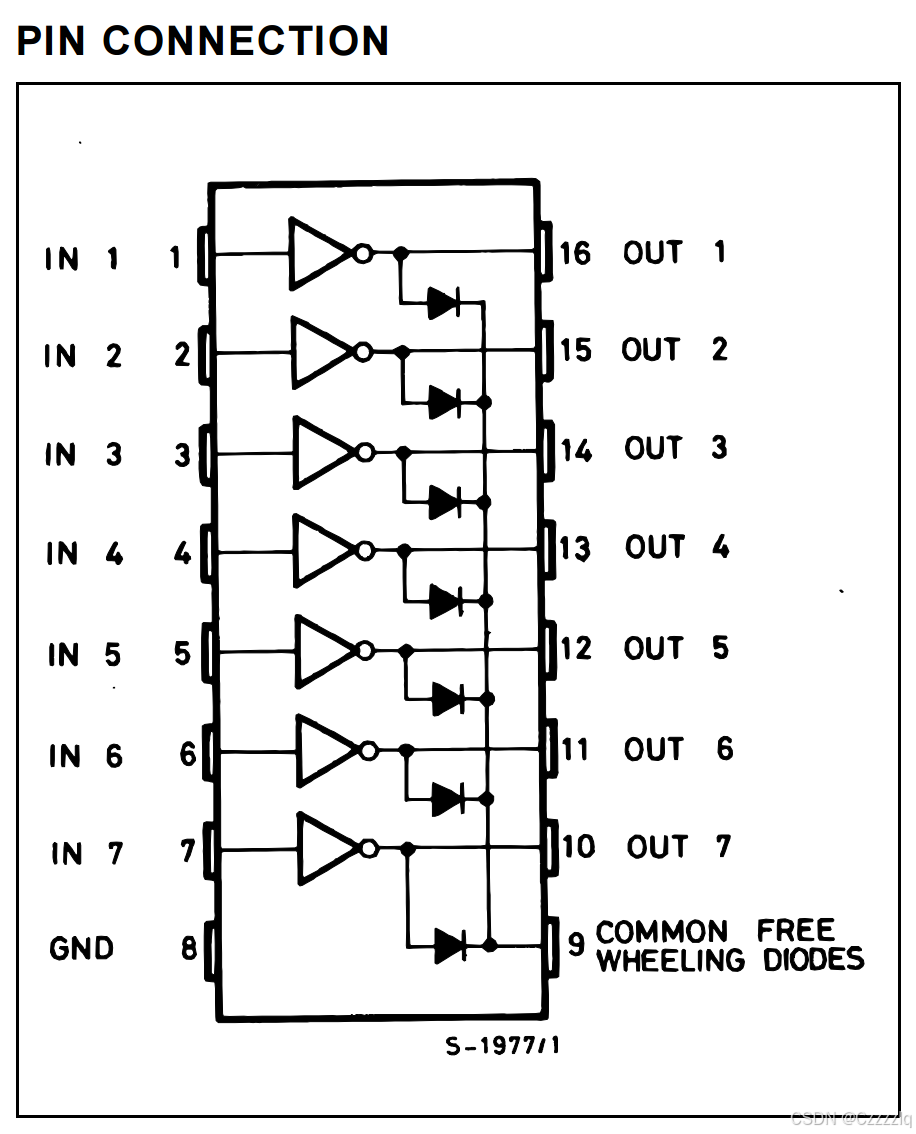
 4. ULN2003(达林顿管)
4. ULN2003(达林顿管)
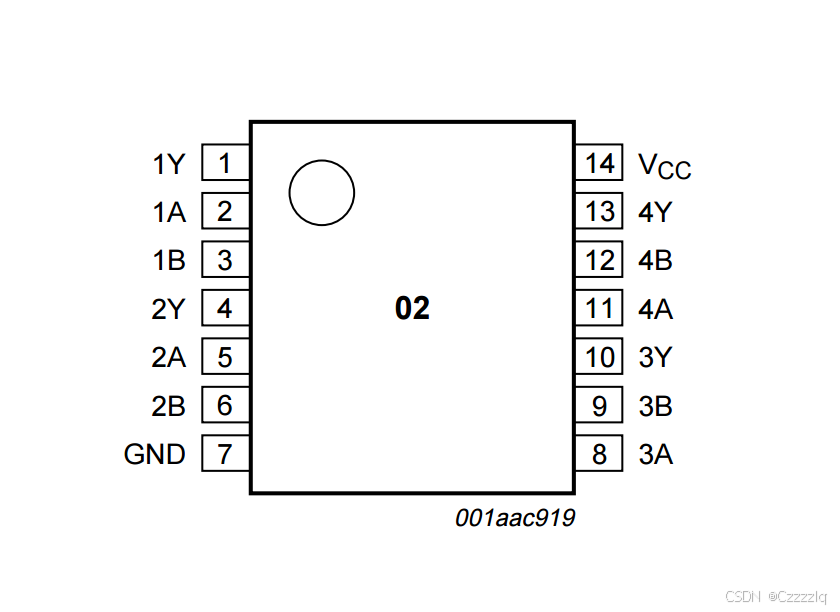
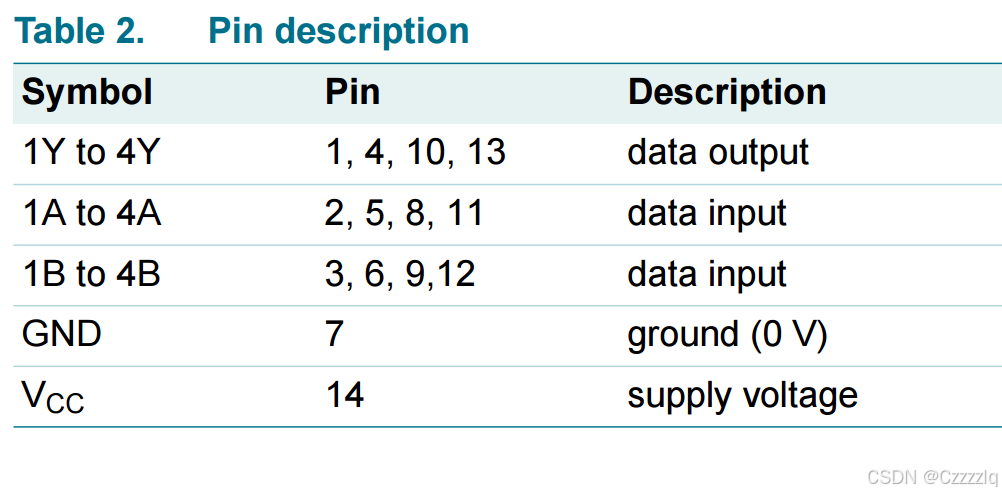
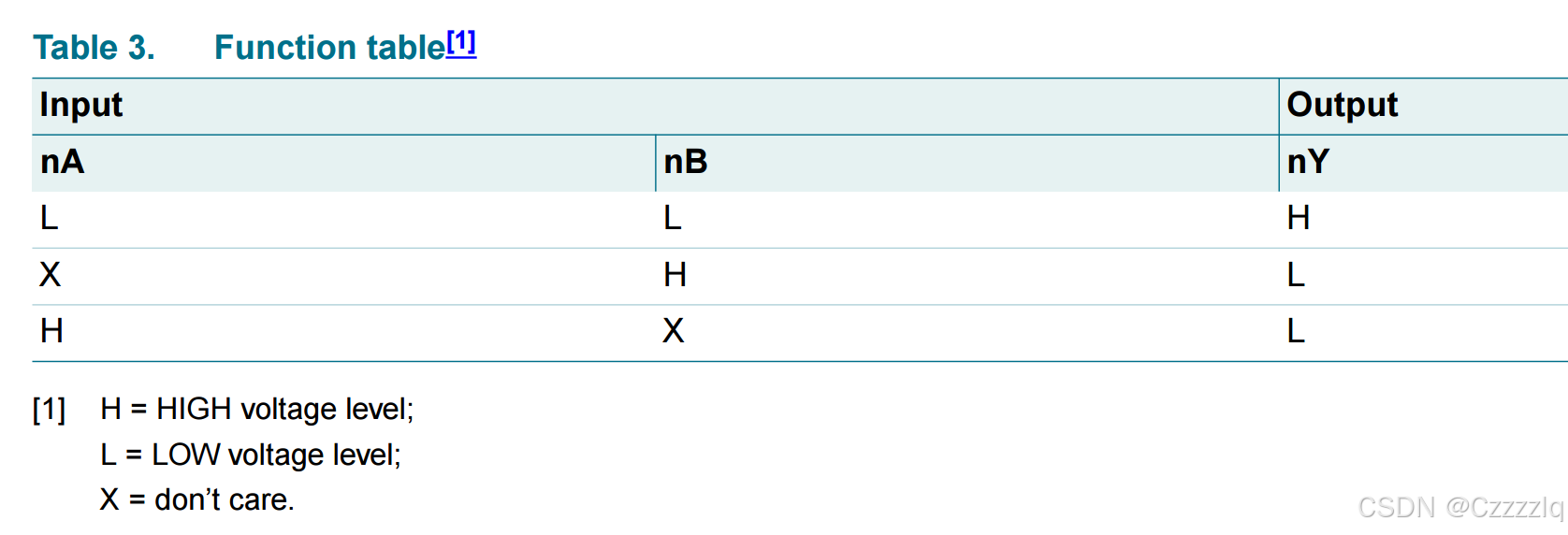
5.74HC02(高速硅栅CMOS器件)
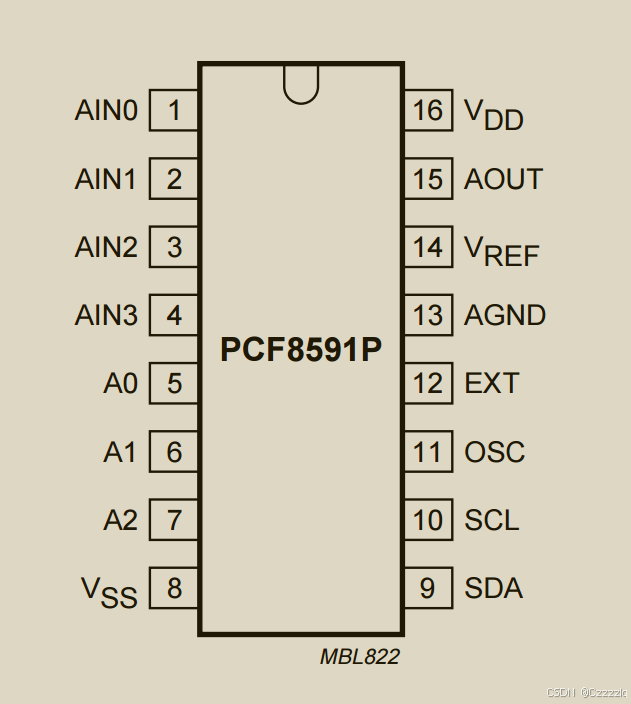
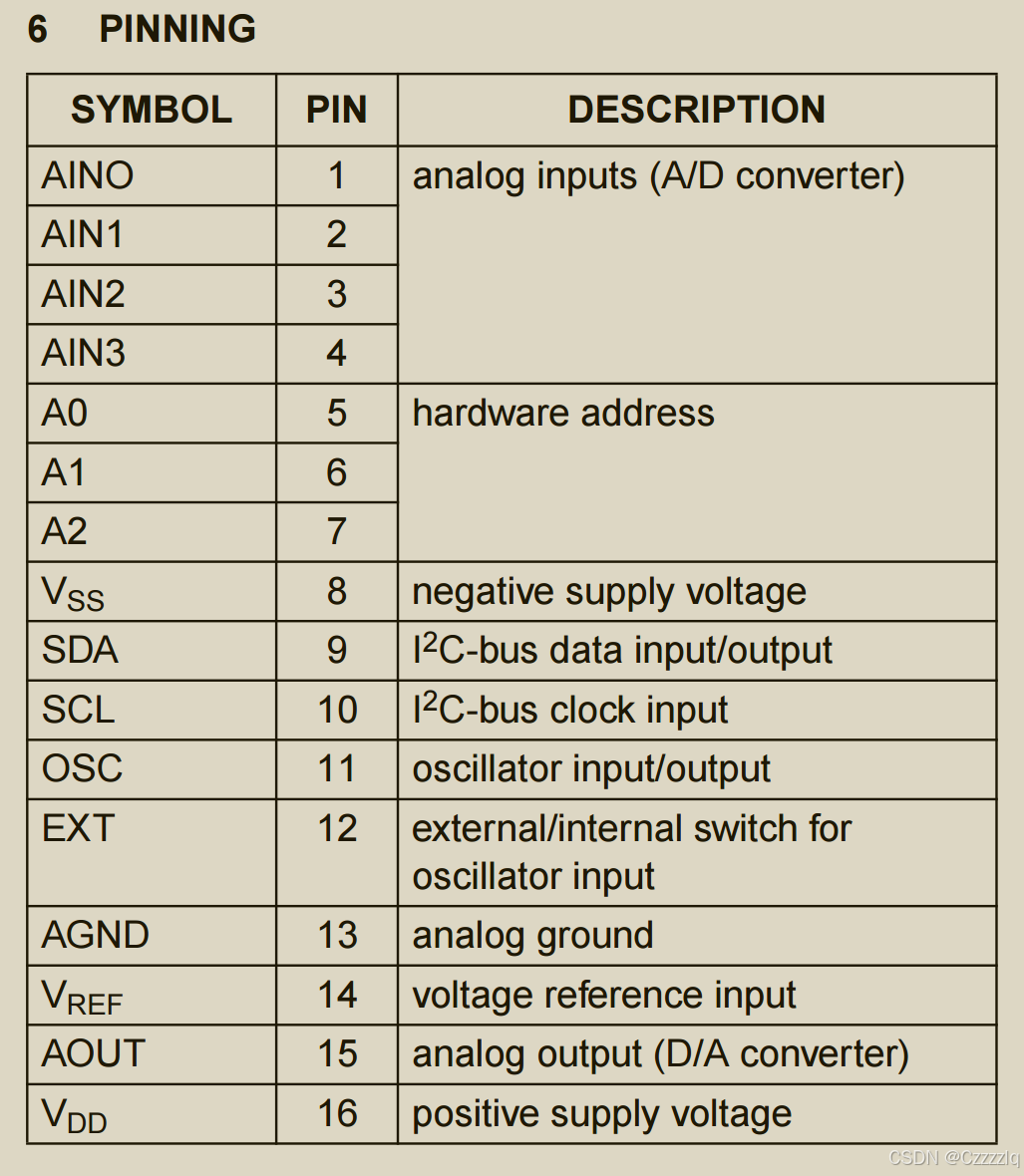
6.PCF8951(DAC转换芯片 )
2.原理图
3.代码实现
1 .实验1
main.c
#include <STC15F2K60S2.h>
#include <intrins.h>
#include "pcf8951.h"
unsigned char code table[] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90, 0xff};
unsigned char debuff[] = {10, 10, 10, 10, 10, 10, 10, 10}; //输入缓冲区
unsigned char despon = 0;
unsigned char isr=0;
bit adc_flag;
void close_buzzer();
void close_led();
void Digital_Tube_Display();
void main()
{
unsigned char adc_value;
close_buzzer();
close_led();
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初始值
TH0 = 0xD4; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1;
PCF8951_Init();
while(1)
{
if(adc_flag)
{
adc_flag = 0;
adc_value = PCF8951_Read();
(adc_value >= 100) ? (debuff[5] = adc_value / 100) : (debuff[5] = 10);
(adc_value >= 10) ? (debuff[6] = adc_value % 100 / 10) : (debuff[6] = 10);
debuff[7] = adc_value % 10;
}
}
}
/*关闭蜂鸣器*/
void close_buzzer()
{
P2 = ((P2&0X1F) | 0XA0);
P0 = 0X00;
P2 &= 0X1F;
}
/*关闭LED*/
void close_led()
{
P2 = ((P2&0X1F) | 0X80);
P0 = 0XFF;
P2 &= 0X1F;
}
void Digital_Tube_Display()
{
P2 = ((P2&0X1F) | 0XE0);
P0 = 0XFF;
P2 &= 0X1F;
P2 = ((P2&0X1F) | 0XC0);
P0=(1 << despon);
P2 &= 0X1F;
P2 = ((P2&0X1F) | 0XE0);
P0 = table[debuff[despon]];
P2 &= 0X1F;
if(++despon == 8)
despon=0;
}
/*中断函数*/
void ISR_T0() interrupt 1
{
if(++isr == 50)
{
isr=0;
adc_flag=1;
}
Digital_Tube_Display();
}pcf8951.c
#include "pcf8951.h"
/*PCF8951写操作*/
void PCF8951_Init()
{
I2C_Start();
Delay10us();
I2C_Write(0x90); //Addressing+Write
Delay10us();
I2C_Write(0x03); //Control Byte
Delay10us();
I2C_Stop();
}
/*PCF8951读操作*/
unsigned char PCF8951_Read()
{
unsigned char dat;
I2C_Start();
Delay10us();
I2C_Write(0x91); Addressing+Read
Delay10us();
dat = I2C_Read(NAK); //此处发送非应答位,表示数据发送成功
Delay10us();
I2C_Stop();
return dat;
}
pcf8951.h
#ifndef __PCF8951_H__
#define __PCF8951_H__
#include <STC15F2K60S2.h>
#include <intrins.h>
#include "i2c.h"
#define ACK 0
#define NAK 1
void PCF8951_Init(); //PCF8951初始化
unsigned char PCF8951_Read(); //PCF8951读操作
#endifi2c.h
#ifndef __I2C_H__
#define __I2C_H__
#include <STC15F2K60S2.h>
#include <intrins.h>
sbit I2C_SCL = P2^0;
sbit I2C_SDA = P2^1;
/*功能宏定义*/
#define SCL_SET I2C_SCL=1
#define SCL_CLR I2C_SCL=0
#define SDA_SET I2C_SDA=1
#define SDA_CLR I2C_SDA=0
void Delay10us(void);
void I2C_Start(void); /*I2C启动信号*/
void I2C_Stop(void); /*I2C结束信号*/
bit I2C_Write(unsigned char dat); /*I2C写操作,返回从机应答值*/
unsigned char I2C_Read(bit flag); /*I2C读操作,从机非应答信号*/
#endifi2c.c
#include "i2c.h"
void Delay10us(void) //@11.0592MHz
{
unsigned char data i;
_nop_();
i = 25;
while (--i);
}
/*I2C启动*/
void I2C_Start()
{
SCL_SET;
SDA_SET;
Delay10us();
SDA_CLR;
Delay10us();
SCL_CLR;
}
/*I2C停止*/
void I2C_Stop()
{
SDA_CLR;
Delay10us();
SCL_SET;
Delay10us();
SDA_SET;
}
/*I2C写操作*/
bit I2C_Write(unsigned char dat)
{
unsigned char mask;
bit ack;
EA = 0;
for(mask=0x80;mask!=0;mask>>=1)
{
if((mask&dat) == 0) //此处进行按位与运算时要加括号,因为==的优先级比&高
SDA_CLR;
else
SDA_SET;
Delay10us();
SCL_SET;
Delay10us();
SCL_CLR;
}
EA = 1;
SDA_SET;
Delay10us();
SCL_SET;
Delay10us();
ack = I2C_SDA;
Delay10us();
SCL_CLR;
return ~ack;
}
/*I2C接收操作*/
unsigned char I2C_Read(bit flag)
{
unsigned char dat;
unsigned char mask;
EA = 0;
for(mask=0x80;mask!=0;mask>>=1)
{
SCL_SET;
Delay10us();
if(I2C_SDA)
dat |= mask;
else
dat &= ~mask;
Delay10us();
SCL_CLR;
}
EA = 1;
if(flag)
SDA_SET;
else
SDA_CLR;
/*
应答位取反符合常规逻辑,
SDA为低电平,应答位,0=不存在或忙或写入失败
SDA为高电平,非应答位,1=存在且空闲或写入成功
*/
Delay10us();
SCL_SET;
Delay10us();
SCL_CLR;
return dat;
}
2.实验2
main.c
#include <STC15F2K60S2.h>
#include <intrins.h>
#include "pcf8951.h"
sbit S7 = P3^0;
sbit S6 = P3^1;
#define VREF 4850 //参考电压
/*按键状态*/
typedef enum {
WAIT_FOR_PRESS,
KEY_PRESSED,
KEY_RELEASED
} Status;
Status key_status = WAIT_FOR_PRESS; /*按键状态变量*/ /*按键数值变量*/
unsigned char key_routine = 0; /*定时器辅助计数器*/
unsigned char code table[] = { 0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90,0xff};
unsigned char debuff[] = {10, 10, 10, 10, 10, 10, 10, 10}; //输入缓冲
unsigned char despon = 0;
bit key_flag = 0; /*按键扫描标志位*/
unsigned char dac_value = 0;
void close_buzzer();
void close_led();
void Digital_Tube_Display();
void SCAN_KEY_BTN(void);
void main()
{
unsigned int Vout;
close_led();
close_buzzer();
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初始值
TH0 = 0xD4; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1;
PCF8951_Init();
while(1)
{
if(key_flag)
{
key_flag = 0;
SCAN_KEY_BTN();
}
Vout = VREF / 255 * dac_value;
/*
计算时注意缓冲区的位置
*/
debuff[0] = 10;
(Vout >= 100) ? (debuff[1] = dac_value / 100) : (debuff[1] = 10);
(Vout >= 10) ? (debuff[2] = dac_value % 100 / 10) : (debuff[2] = 10);
debuff[3] = dac_value % 10;
(Vout >= 1000) ? (debuff[4] = Vout / 1000) : (debuff[4] = 10);
(Vout >= 100) ? (debuff[5] = Vout % 1000 / 100) : (debuff[5] = 10);
(Vout >= 10) ? (debuff[6] = Vout % 100 / 10) : (debuff[6] = 10);
debuff[7] = Vout % 10;
}
}
/*关闭蜂鸣器*/
void close_buzzer()
{
P2 = ((P2&0X1F) | 0XA0);
P0 = 0X00;
P2 &= 0X1F;
}
/*关闭LED*/
void close_led()
{
P2 = ((P2&0X1F) | 0X80);
P0 = 0XFF;
P2 &= 0X1F;
}
/*数码管显示函数*/
void Digital_Tube_Display()
{
P2 = ((P2&0X1F) | 0XE0);
P0 = 0XFF;
P2 &= 0X1F;
P2 = ((P2&0X1F) | 0XC0);
P0=(1 << despon);
P2 &= 0X1F;
P2 = ((P2&0X1F) | 0XE0);
P0 = table[debuff[despon]];
P2 &= 0X1F;
if(++despon == 8)
despon=0;
}
/*中断函数*/
void ISR_T0() interrupt 1
{
Digital_Tube_Display();
key_routine++;
if(key_routine == 10) /*每10ms执行一次按键扫描*/
{
key_routine = 0;
key_flag = 1;
}
}
/*状态机按键扫描*/
void SCAN_KEY_BTN(void)
{
switch(key_status)
{
case WAIT_FOR_PRESS:
if((S7==0) || (S6==0))
key_status = KEY_PRESSED;
break;
case KEY_PRESSED:
if(S7==0){
key_status = KEY_RELEASED;
dac_value += 5;
if(dac_value > 255)
dac_value = 255;
PCF8951_dac(dac_value);
}else if(S6==0){
key_status = KEY_RELEASED;
dac_value -= 5;
if(dac_value < 0)
dac_value = 0;
PCF8951_dac(dac_value);
}else{
key_status = WAIT_FOR_PRESS;
}
break;
case KEY_RELEASED:
if(S7 && S6){ /*按键按下后释放*/
key_status = WAIT_FOR_PRESS;
}
break;
default :
break;
}
}
pcf8951.h
#ifndef __PCF8951_H__
#define __PCF8951_H__
#include <STC15F2K60S2.h>
#include <intrins.h>
#include "i2c.h"
#define ACK 0
#define NAK 1
void PCF8951_Init(); //PCF8951初始化
void PCF8951_dac(unsigned char dat); //PCF8951读操作
#endifpcf8951.c
#include "pcf8951.h"
/*PCF8951写操作*/
void PCF8951_Init()
{
I2C_Start();
Delay10us();
I2C_Write(0x90); //Addressing+Write
Delay10us();
I2C_Write(0x03); //Control Byte
Delay10us();
I2C_Stop();
}
/*PCF8951读操作*/
unsigned char PCF8951_Read()
{
unsigned char dat;
I2C_Start();
Delay10us();
I2C_Write(0x91); Addressing+Read
Delay10us();
dat = I2C_Read(NAK); //此处发送非应答位,表示数据发送成功
Delay10us();
I2C_Stop();
return dat;
}
i2c.h
#ifndef __I2C_H__
#define __I2C_H__
#include <STC15F2K60S2.h>
#include <intrins.h>
sbit I2C_SCL = P2^0;
sbit I2C_SDA = P2^1;
/*功能宏定义*/
#define SCL_SET I2C_SCL=1
#define SCL_CLR I2C_SCL=0
#define SDA_SET I2C_SDA=1
#define SDA_CLR I2C_SDA=0
void Delay10us(void);
void I2C_Start(void); /*I2C启动信号*/
void I2C_Stop(void); /*I2C结束信号*/
bit I2C_Write(unsigned char dat); /*I2C写操作,返回从机应答值*/
//unsigned char I2C_Read(bit flag); /*I2C读操作,从机非应答信号*/
#endifi2c.c
#include "i2c.h"
void Delay10us(void) //@11.0592MHz
{
unsigned char data i;
_nop_();
i = 25;
while (--i);
}
/*I2C启动*/
void I2C_Start()
{
SCL_SET;
SDA_SET;
Delay10us();
SDA_CLR;
Delay10us();
SCL_CLR;
}
/*I2C停止*/
void I2C_Stop()
{
SDA_CLR;
Delay10us();
SCL_SET;
Delay10us();
SDA_SET;
}
/*I2C写操作*/
bit I2C_Write(unsigned char dat)
{
unsigned char mask;
bit ack;
EA = 0;
for(mask=0x80;mask!=0;mask>>=1)
{
if((mask&dat) == 0) //此处进行按位与运算时要加括号,因为==的优先级比&高
SDA_CLR;
else
SDA_SET;
Delay10us();
SCL_SET;
Delay10us();
SCL_CLR;
}
EA = 1;
SDA_SET;
Delay10us();
SCL_SET;
Delay10us();
ack = I2C_SDA;
Delay10us();
SCL_CLR;
return ~ack;
}
///*I2C接收操作*/
//unsigned char I2C_Read(bit flag)
//{
// unsigned char dat;
// unsigned char mask;
// EA = 0;
// for(mask=0x80;mask!=0;mask>>=1)
// {
// SCL_SET;
// Delay10us();
// if(I2C_SDA)
// dat |= mask;
// else
// dat &= ~mask;
// Delay10us();
// SCL_CLR;
// }
// EA = 1;
// if(flag)
// SDA_SET;
// else
// SDA_CLR;
// /*
// 应答位取反符合常规逻辑,
// SDA为低电平,应答位,0=不存在或忙或写入失败
// SDA为高电平,非应答位,1=存在且空闲或写入成功
// */
// Delay10us();
// SCL_SET;
// Delay10us();
// SCL_CLR;
//
// return dat;
//}问题总结
1.在读取PCF8951的模拟电压值时,使用I2C通信,在接收数据完毕后发送应答信号,应发送非应答位即将SDA置1。在编程过程中错误地发送了应答位。SDA为低电平,应答位,0=不存在或忙或写入失败。SDA为高电平,非应答位,1=存在且空闲或写入成功
2.涉及到全局变量,普遍将其放在所有函数之外。在编程时错误地将其放在主函数内,且未将static关键字
3.在数据分位时,看清楚设置的判定条件的范围,按位赋值时注意充当输入缓冲区的数组的索引
实验现象
PCF951
pcf951

















 3134
3134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









