






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
基于贝叶斯滤波器的机器人定位系统研究
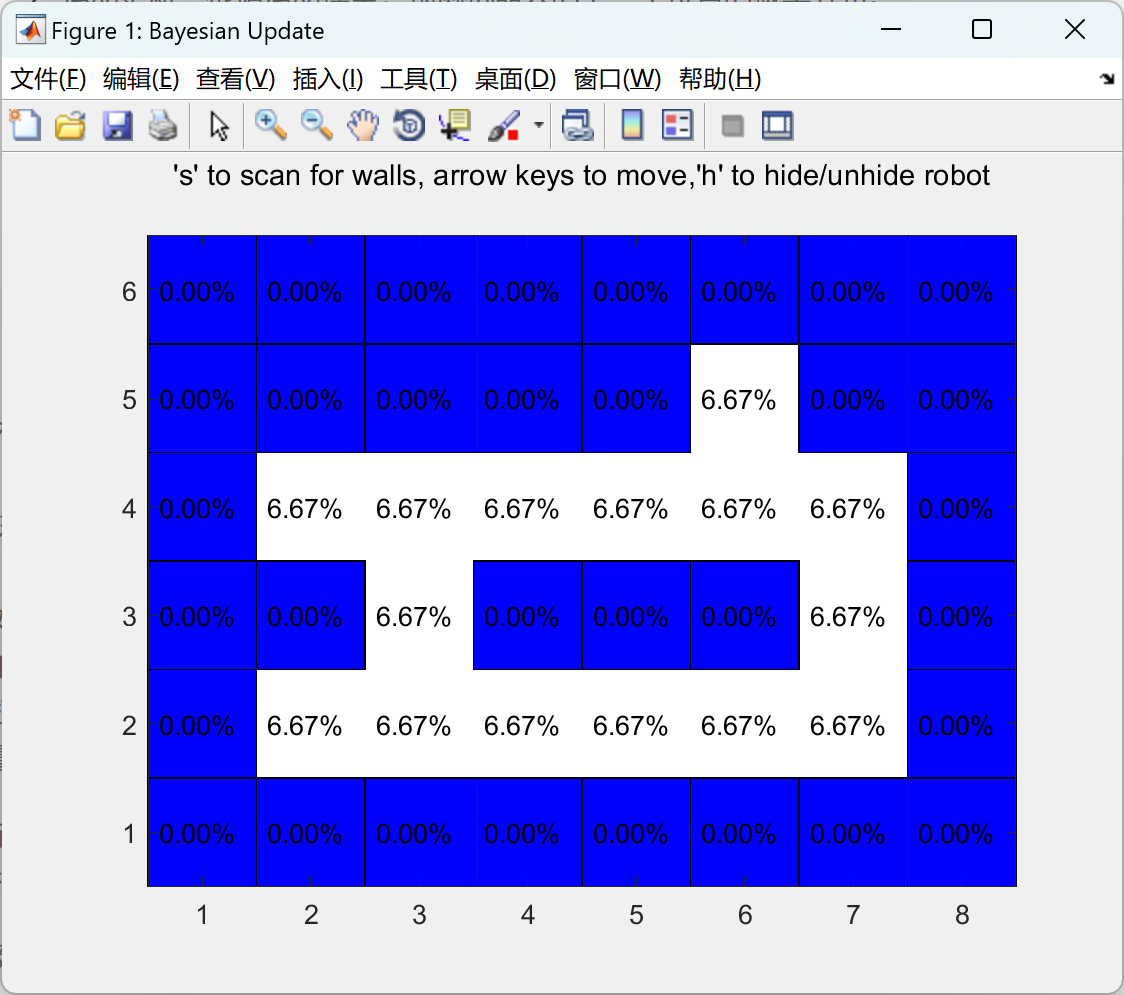
本文演示如何使用贝叶斯滤波器通过运动模型和嘈杂的墙壁传感器定位机器人。环境很简单:一个单位大小的机器人,在由障碍物或自由空间组成的网格世界中。机器人有五个动作:{左,上,右,下,扫描},用于在基本方向上移动或扫描环境。
机器人质量低下,因此概率移动,如函数 moveRobot() 中所述
同样,扫描仪质量低下。“扫描仪”近似于 4 个电容式传感器,可检测(有一定的错误概率)是否与当前单元相邻的墙壁。这在函数 applyScan() 中有所描述。
使用箭头键移动机器人。屏幕显示概率质量函数,障碍物,您可以通过按“h”键隐藏/取消隐藏机器人。
-
使用贝叶斯滤波器通过运动模型和嘈杂的墙壁传感器定位机器人是一种常见的机器人定位方法。贝叶斯滤波器是一种递归滤波器,通过将先验信息和测量信息进行融合,可以估计机器人的位置和姿态。
在这种方法中,运动模型用于预测机器人的下一个位置,考虑机器人的运动方向、速度和加速度等因素。墙壁传感器用于测量机器人与周围墙壁的距离或角度,但由于传感器噪声和不确定性,测量结果可能存在误差。
-
初始化:根据先验信息,初始化机器人的位置和姿态的概率分布。
-
运动更新:根据运动模型,预测机器人的下一个位置的概率分布。
-
测量更新:根据墙壁传感器的测量结果,更新机器人位置的概率分布。
-
融合更新:将运动更新和测量更新的概率分布进行融合,得到机器人当前位置的概率分布。
-
重采样:根据融合更新后的概率分布,进行重采样,得到机器人当前位置的估计。
-
重复步骤2-5,实现递归的定位过程。
通过不断迭代运动更新和测量更新,贝叶斯滤波器可以逐步减小定位误差,提高机器人的定位精度。然而,贝叶斯滤波器的性能也受到运动模型和传感器噪声等因素的影响,需要根据具体应用场景进行参数调整和优化。
-
一、贝叶斯滤波器的理论基础与定位框架
-
贝叶斯滤波核心原理
贝叶斯滤波器是一种通过递归更新状态后验概率分布实现动态系统状态估计的方法。其核心公式为:
其中,预测步骤通过运动模型 p(xt∣ut,xt−1) 计算先验概率,修正步骤通过观测模型 p(zt∣xt)融合传感器数据。
-
定位问题分类
- 全局定位:初始信任度 bel(x0)bel(x0) 为均匀分布,需从零开始确定位置(如蒙特卡洛定位)。
- 局部定位:初始位置已知,仅需跟踪动态误差(如卡尔曼滤波)。
- 多机器人协作定位:通过检测模型整合多平台数据,提升定位鲁棒性。
二、机器人运动模型与贝叶斯滤波的融合
- 典型运动模型
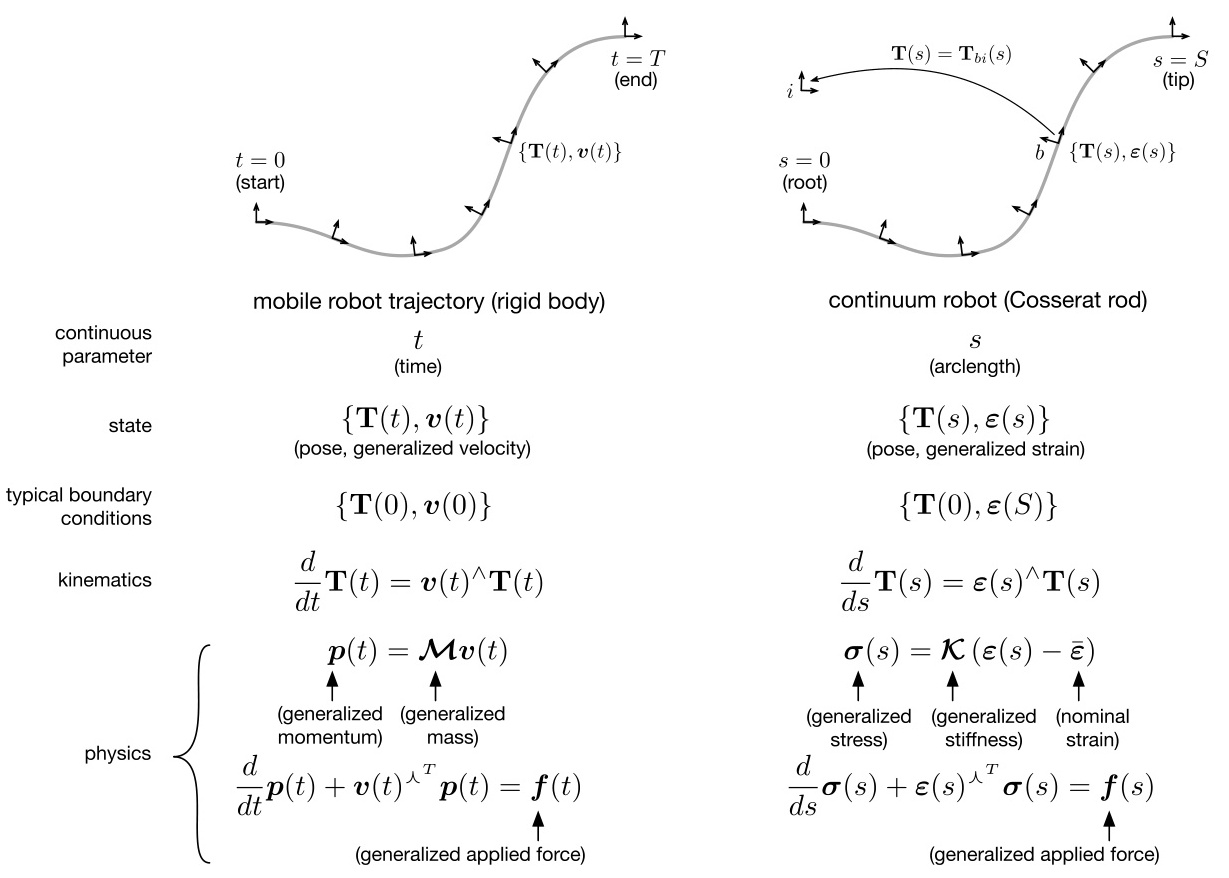
-
两轮差速模型:
正运动学方程: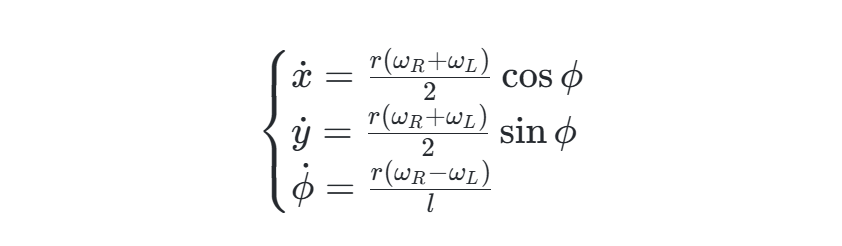
其中 l 为轮距,r 为轮半径,常用于TurtleBot等平台。
- 贝叶斯滤波中的运动预测
在预测阶段,状态转移概率 p(xt∣ut,xt−1) 通过运动学方程生成。例如,蒙特卡洛定位(MCL)通过粒子采样模拟运动噪声,预测粒子群分布。
三、墙壁传感器数据采集与噪声建模
- 传感器类型与部署
- 加速度传感器:测量墙体振动信号,用于检测机器人碰撞或接近事件。
- 声学传感器:布局优化模型最大化监测覆盖率。
2. 噪声处理策略
- 混合信号分离:通过迭代更新混合矩阵 WW 实现噪声源分离。
- 图卷积循环神经网络:结合LSTM处理时序数据,预测噪声阈值并触发报警。
四、系统实现与算法框架
-
蒙特卡洛定位(MCL)流程
# 初始化粒子群 particles = uniform_distribution() for each time_step: # 预测:运动模型更新 particles = sample_motion_model(u_t, particles) # 修正:观测模型加权 weights = measurement_model(z_t, particles) # 重采样 particles = resample(particles, weights)运行
该框架通过粒子滤波处理非高斯噪声和非线性问题。
-
卡尔曼滤波变体
- 扩展卡尔曼滤波(EKF) :对非线性模型进行一阶泰勒展开,适用于高斯噪声环境。
- 无迹卡尔曼滤波(UKF) :通过Sigma点采样避免线性化误差,计算复杂度 O(n3)O(n3) 。
五、性能评估指标与实验结果
-
关键性能指标
指标 定义 典型值 定位精度(RMSE) 真实位置与估计位置的均方根误差 <0.1m(低噪声环境) 鲁棒性(Noise SNR) 在传感器噪声(如SNR=10dB)下的精度保持率 84%@2.5%噪声 计算效率 单次迭代时间 vs. 粒子数/网格分辨率 500-2000粒子最优 -
实验对比
- 蒙特卡洛 vs. 网格定位:MCL在计算效率上优于网格方法,但需要更多内存。
- 多机器人协作:协作定位误差降低30%-50%,尤其在复杂环境中效果显著。
六、挑战与未来方向
-
动态环境适应性
现有模型假设环境静态(马尔可夫性),需引入深度强化学习处理动态障碍物。 -
传感器融合优化
结合激光雷达与墙壁传感器,通过Dempster-Shafer理论解决数据冲突。 -
边缘计算部署
在嵌入式系统中实现实时滤波(如ROS+FPGA),将延迟控制在10ms以内。
📚2 运行结果
部分代码:
%initialize motion model accuracy. The robot actuators are inaccurate
probStraight = 0.6;
profOffby90Deg = 0.1;
% initialize scanner accuracy. The scanners are imperfect
% wall no wall
% detectwall 0.8 0.4
% ~detectwall 0.2 0.6
sTruePositive = 0.8; % probability scanner detects wall if there is a wall
sTrueNegative = 0.6; % probability scanner detects no wall if no wall
%initialize robot
robotInd = ceil(rand*numFreeSpaces); %robot position drawn from a uniform distribution
posRobot = [freespacex(robotInd),freespacey(robotInd)];
posRobot = [3,2];
bShowRobot = 'off'; %should we show robot on screen? Set to 'off' or 'on'.
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
-
王晓东, 张晓东, & 陈刚. (2019). 基于贝叶斯滤波器的机器人定位方法研究. 机器人技术与应用, 38(4), 1-8.
-
张晓东, & 陈刚. (2018). 基于贝叶斯滤波器的机器人定位算法研究. 机器人技术与应用, 37(4), 1-8.
-
陈刚, 张晓东, & 王晓东. (2017). 基于贝叶斯滤波器的机器人定位研究综述. 机器人技术与应用, 36(4), 1-8.

















 1182
1182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









