




 IOU是衡量目标检测中预测框与真实框重叠程度的指标,具有尺度不变性。它用于评估模型预测准确性,也可用于正负样本区分、损失函数优化和NMS筛选。本文介绍了IOU的概念、应用场景,并提供了代码示例。
IOU是衡量目标检测中预测框与真实框重叠程度的指标,具有尺度不变性。它用于评估模型预测准确性,也可用于正负样本区分、损失函数优化和NMS筛选。本文介绍了IOU的概念、应用场景,并提供了代码示例。
什么是IOU?
简单来说IOU就是用来度量目标检测中预测框与真实框的重叠程度。在图像分类中,有一个明确的指标准确率来衡量模型分类模型的好坏。其公式为:

这个公式显然不适合在在目标检测中使用。我们知道目标检测中都是用一个矩形框住被检测物体,又因为检测物体尺度不同,预测框与真实框或大或小。所以度量标准必然是具有尺度不变性的,那么大神们就引入了一个概念IOU(交并比),用预测框(A)和真实框(B)的交集除上二者的并集,其公式为:
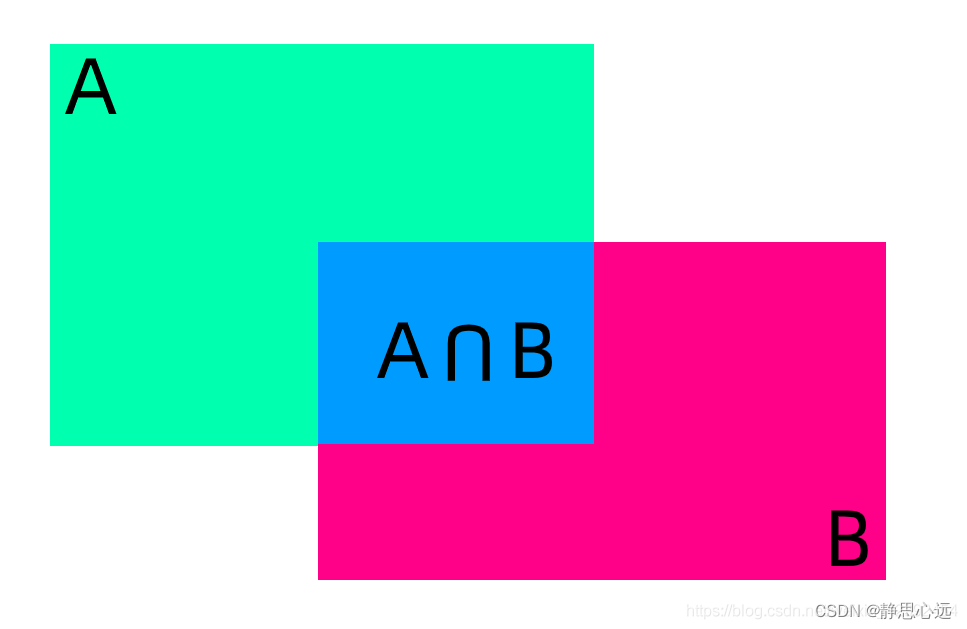
显而易见,IOU的值越高也说明A框与B框重合程度越高,代表模型预测越准确。反之,IOU越低模型性能越差。
IOU应用场景
除了作为目标检测的评价指标,IOU还有其他应用场景:
- 1.在anchor-based方法的目标检测中,根据IOU的值来区分正样本和负样本。
- 2.可以直接作为边界框回归的loss函数进行优化。
- 3.在NMS(非极大值抑制)对预测框筛选。
写代码调试
说了这么多,关键还得写代码调试看看
python代码
example1
import numpy as np
def IoU(box1, box2):
b1_x1, b1_y1, b1_x2, b1_y2 = box1
b2_x1, b2_y1, b2_x2, b2_y2 = box2
xx1 = np.maximum(b1_x1, b2_x1)
yy1 = np.maximum(b1_y1, b2_y1)
xx2 = np.minimum(b1_x2, b2_x2)
yy2 = np.minimum(b1_y2, b2_y2)
w = np.maximum(0.0, yy2 - yy1)
h = np.maximum(0.0, xx2 - xx1)
inter = w * h
IoU = inter/((b1_x2-b1_x1)*(b1_y2-b1_y1) + (b2_x2-b2_x1)*(b2_y2-b2_y1) - inter)
print("IoU: ", IoU)
if __name__ == "__main__":
box1  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











