




 ROS的Nodelet是为了解决ROS中基于XML-RPC的通信在传输大数据时的效率问题。Nodelet允许在同一进程中运行多个算法,通过shared_ptr实现零拷贝通信,减少数据传输的延迟和损耗。它使用pluginlib进行动态加载,提供类似独立节点的功能,同时在管理器中实现多节点间的高效通信。Nodelet还提供了单线程和多线程API,以及用于调试的ROSCONSOLE宏。
ROS的Nodelet是为了解决ROS中基于XML-RPC的通信在传输大数据时的效率问题。Nodelet允许在同一进程中运行多个算法,通过shared_ptr实现零拷贝通信,减少数据传输的延迟和损耗。它使用pluginlib进行动态加载,提供类似独立节点的功能,同时在管理器中实现多节点间的高效通信。Nodelet还提供了单线程和多线程API,以及用于调试的ROSCONSOLE宏。
为什么需要Nodelet
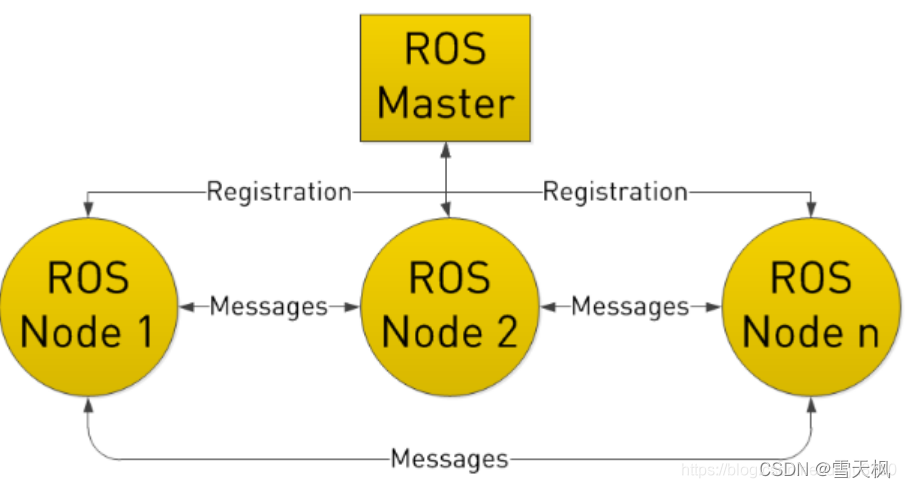
ROS是一种基于分布式网络通讯的操作系统,整个机器人控制系统是由一个Master主节点和若干个功能相对独立的Node子节点组成,这也是ROS系统最主要的特点就是分布式以及模块化的设计。在ROS通讯过程中Master节点存储着各个子节点的topics和services的注册信息,每个功能节点在请求服务之前先向主节点进行注册,然后节点之间就可以直接进行信息传递。ROS的底层通信都是基于XML-RPC协议实现的。
XML-RPC协议是XML Remote Prodecure Call的简称,是一种远程过程调用的分布式网络协议。它允许跨平台的软件间通过发送和接收XML格式的消息进行远程调用,即允许不同的操作系统、不同环境中的程序实现基于Internet过程调用的规范和一系列方法的实现。这种远程过程调用使用http作为传输协议,XML作为传送信息的编码格式。
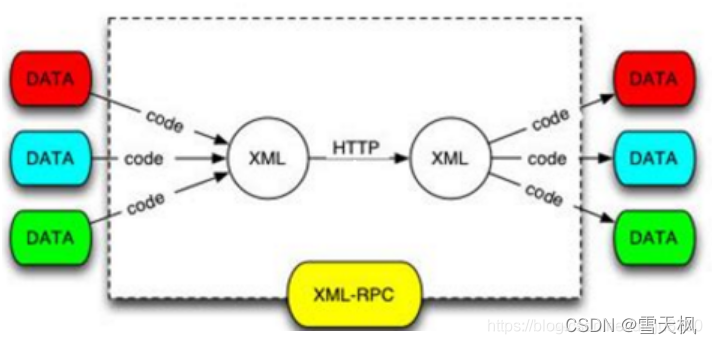
XML-RPC的远程调用过程为:首先客户端发起请求后需要按照协议格式对请求信息进行填充;填充完毕以后XML格式的信息会被转化为数据流,通过传输层进行传输。服务端收到客户端发出来的数据流,会将其再转化为XML格式的信息,然后按照XML-RPC协议获取客户端的请求信息,并对请求信息进行处理,处理完毕以后将反馈信息发送给客户端。
以XML-RPC的方式传输数据存在一定的延时和阻塞。在数据量小、频率低的情况下,传输耗费的时间可以忽略不计。但当传
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 837
837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









