




(15)关于动画的制作,步骤很多。很琐碎。不必要全部记录步骤,也记不明白。事倍功半。 去 B 站看看视频,很快就知道大概了,这里的记录,将改为只记录重点和必要的部分,不必要是全部的步骤了。
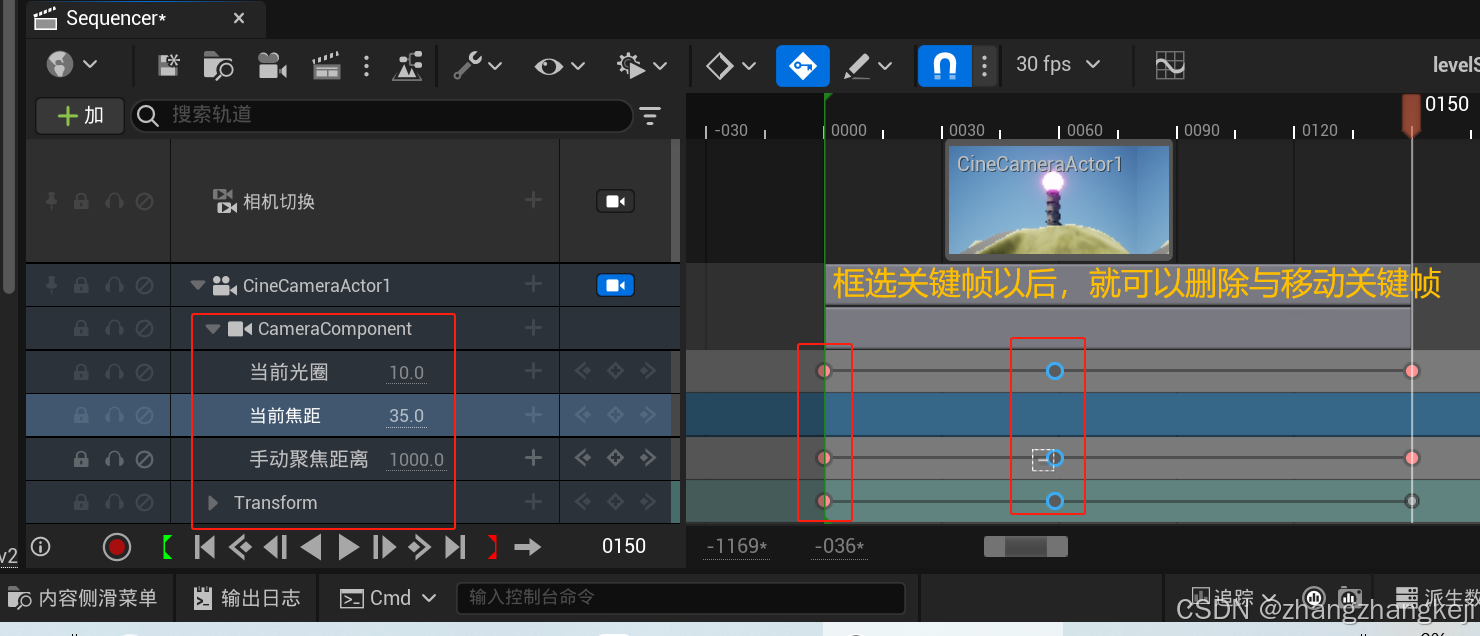
++ 移动关键帧 :
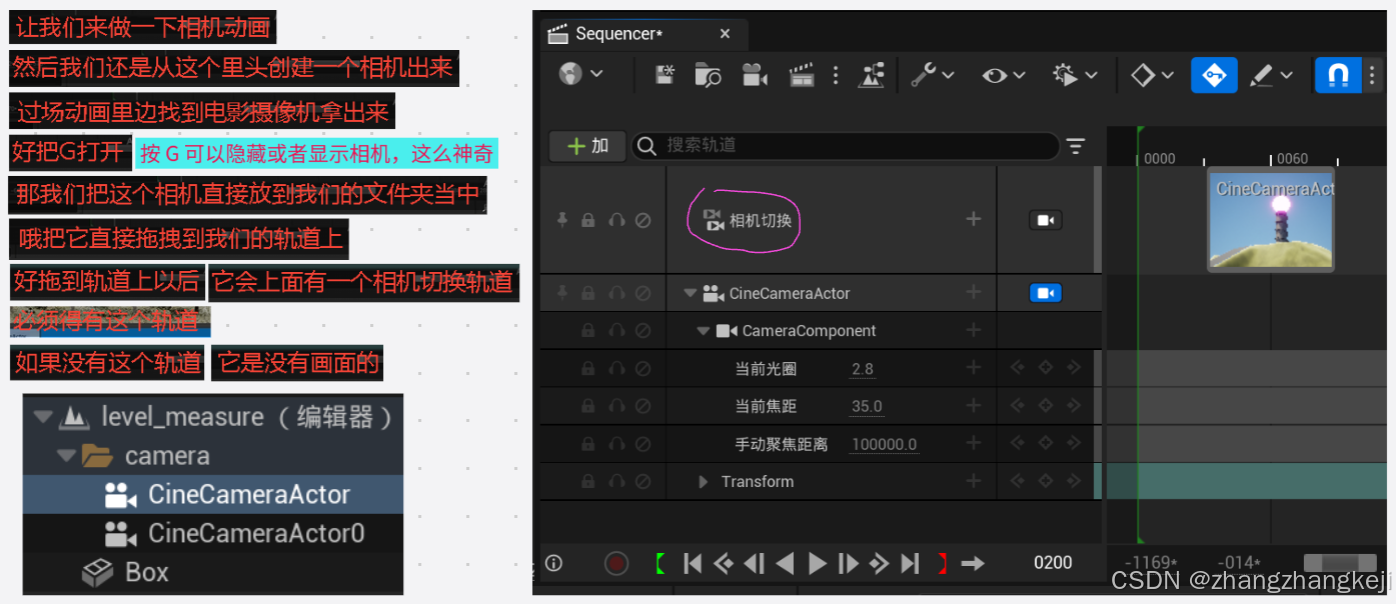
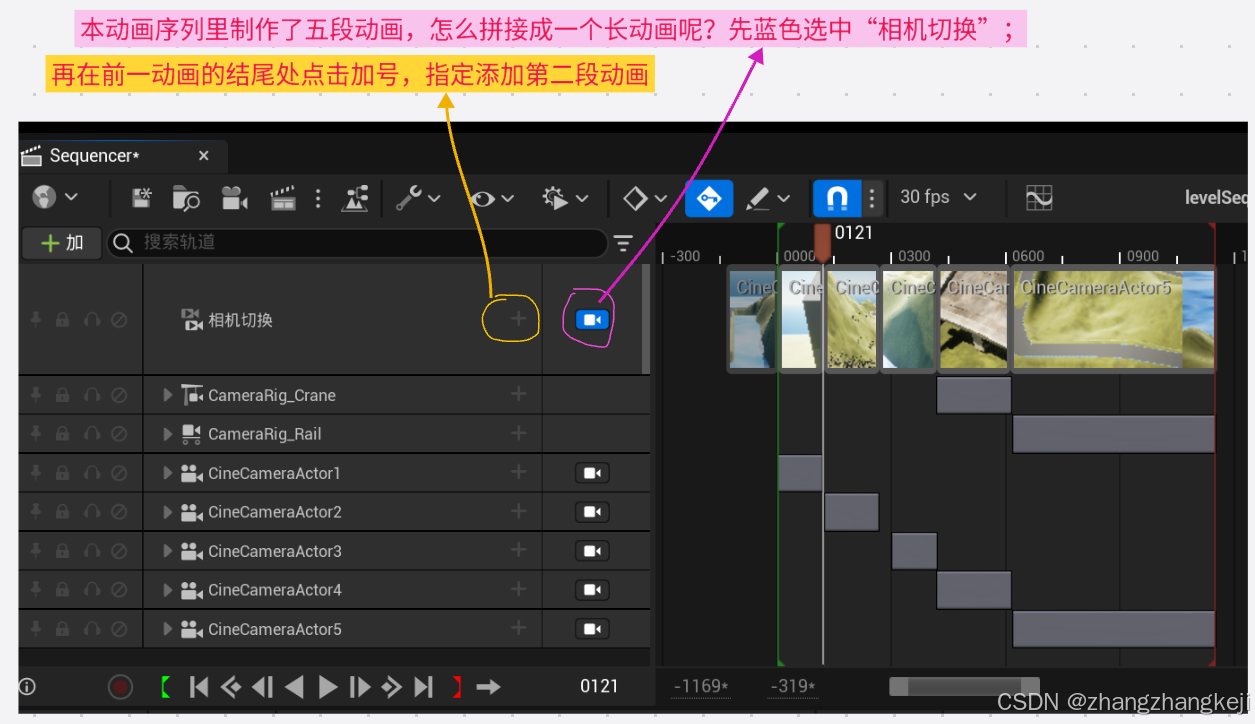
(16)在动画里加入了多个相机。但无法依次播放所有的相机里的动画。
(17)相机摇臂里的单词 :
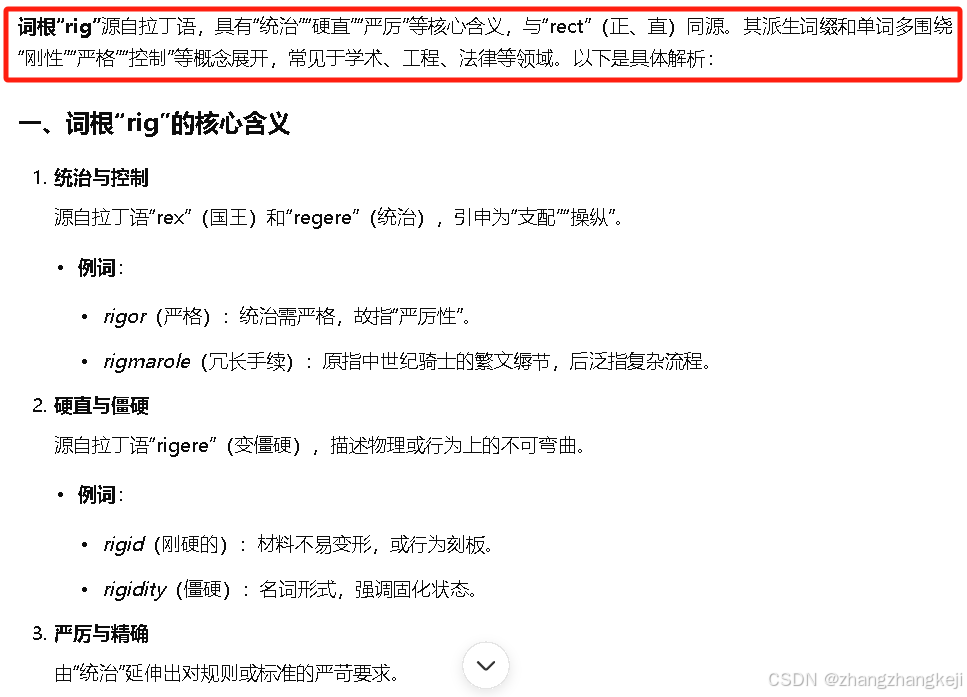
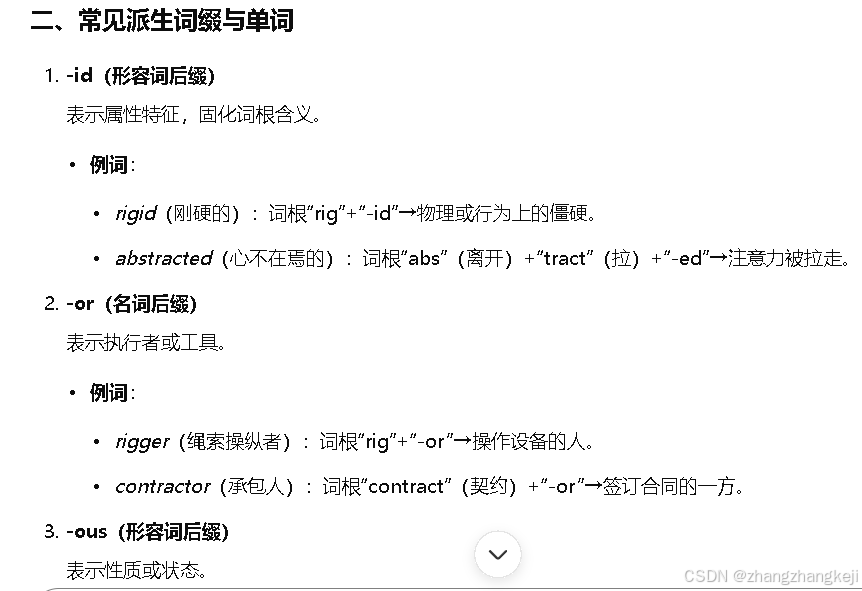
++ crane :
++相机摇臂组件 :

++摇臂与相机的联合参数调整 :

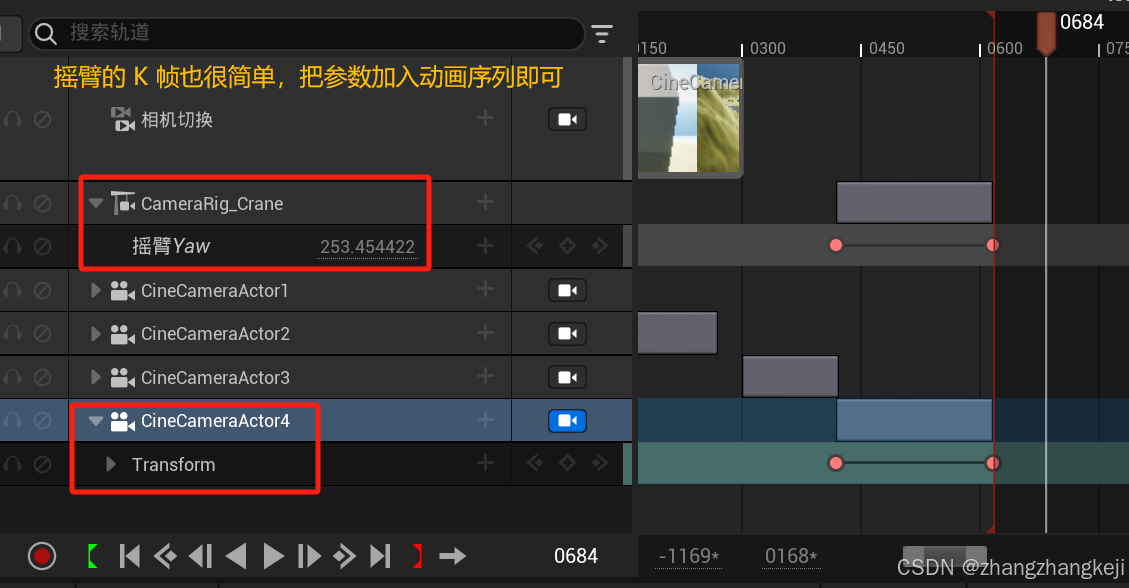
++ 如何为摇臂相机制作动画 :
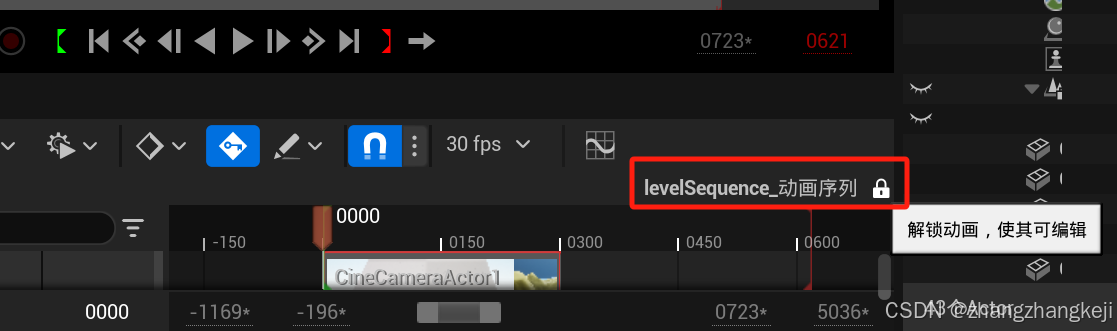
(18)锁定动画,避免误编辑 :
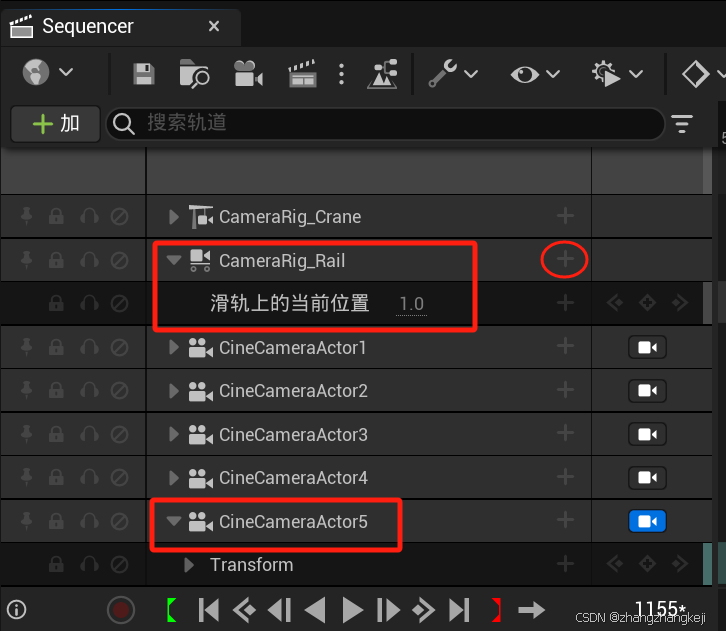
(19)滑轨的动画制作,把导轨放进动画,添加参数即可 :
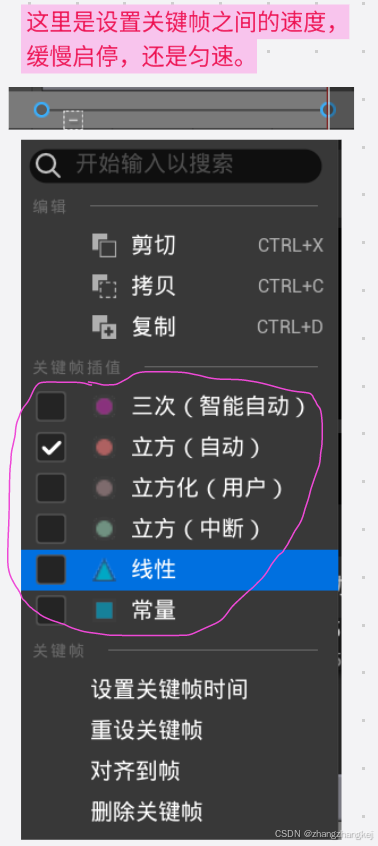
(20)关键帧之间的速度 :
(21)动画连接 :
++放大动画预览场景的方法:鼠标点中场景,按 F11。
(22)动画的过渡轨道 :
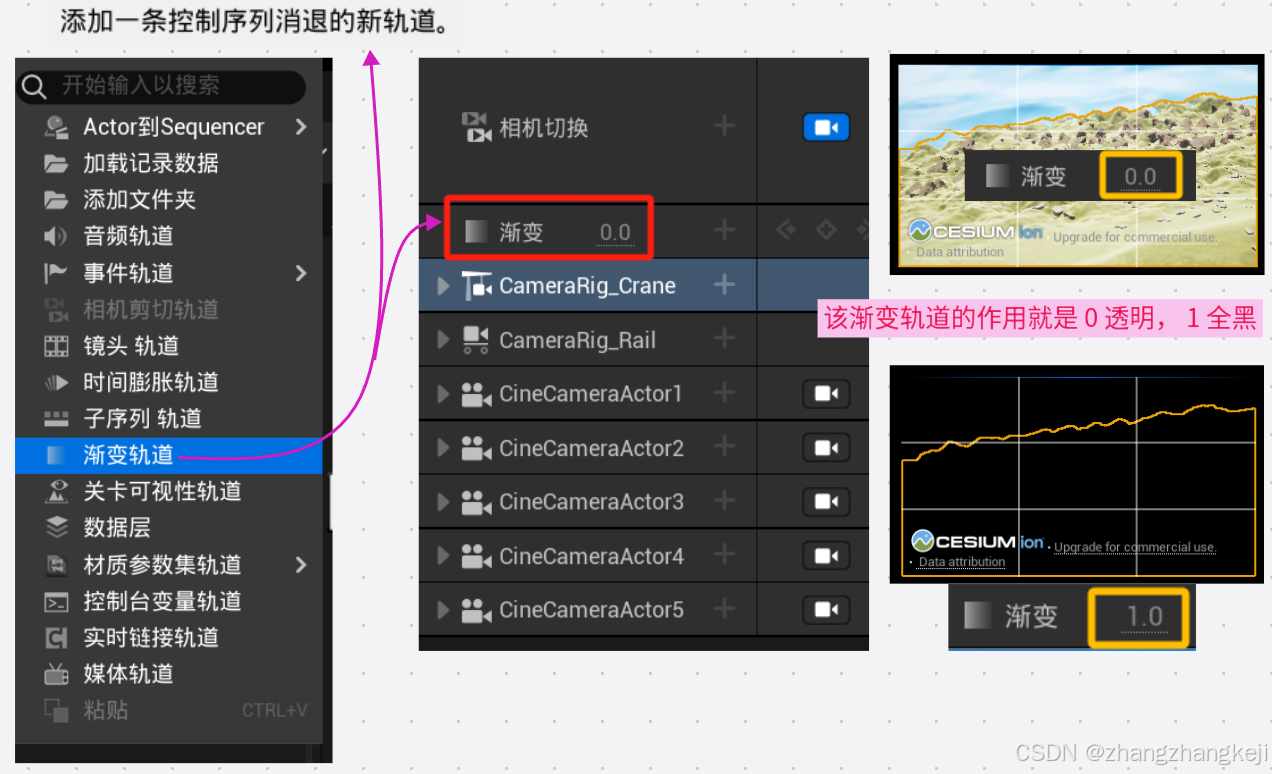
++转场关键帧 :

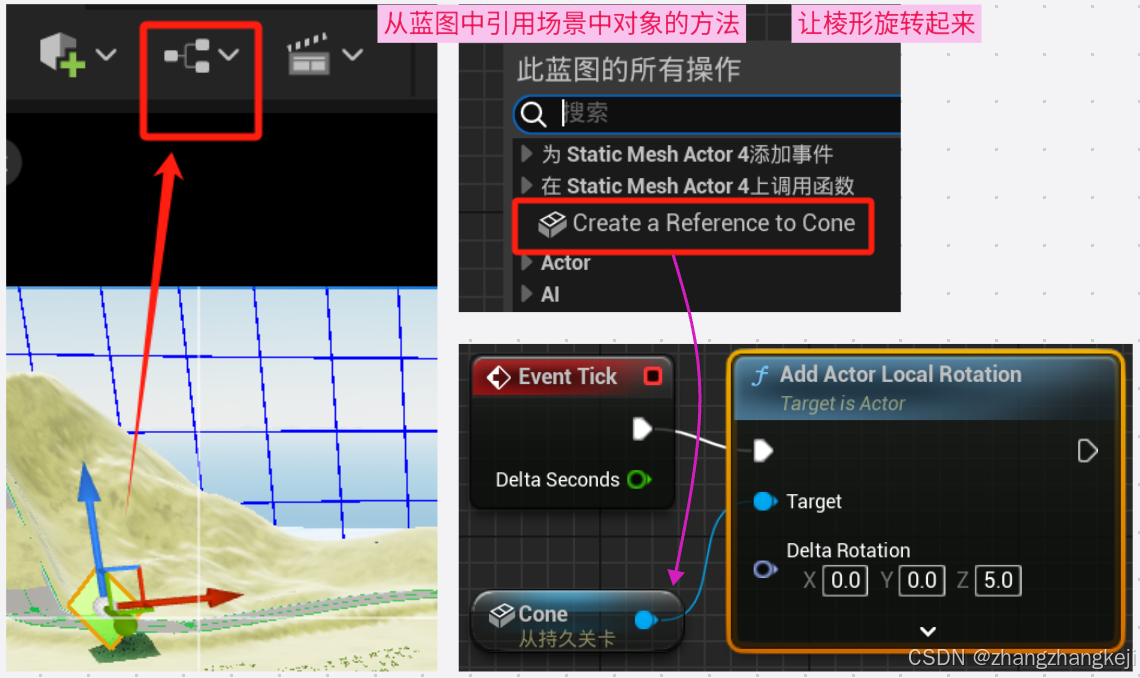
(23)从关卡蓝图中引用场景中对象的方法 :
(34)
谢谢


















 1334
1334

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











