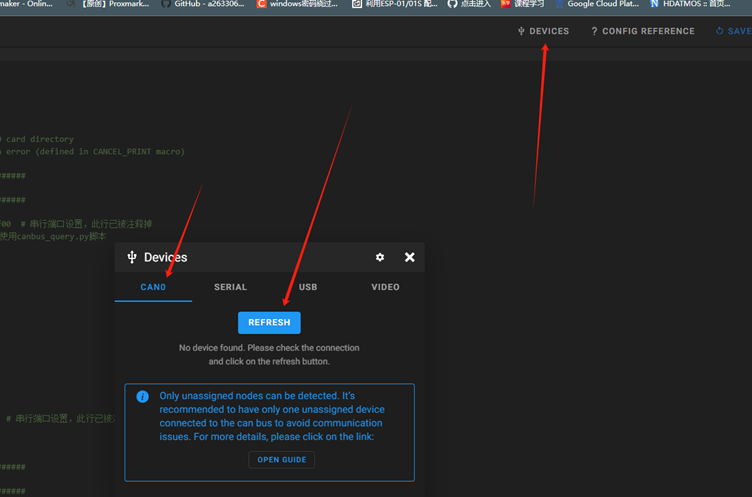
若3D打印机的制图师V3不能工作了,可以通过一下几个方法判断是否损坏 若有不足之处请大家指出,相互讨论 1.通电情况下,制图师芯片是否发热烫手 2.当探测器靠近金属,看指示灯是否正常 3.看uuid是否正常识别,将主板、ebb的uuid注释,然后看是否可以识别到探测器的UUID




 1884
1080
2003
1万+
1884
1080
2003
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言