







 本文档详细介绍了如何在Ubuntu16.04上安装MXNet库,并确保其支持OpenBLAS、OpenCV、CUDA和cuDNN。首先,通过apt-get安装OpenBLAS和libopencv-dev,然后从GitHub克隆MXNet源码并配置编译选项,特别启用CUDA和cuDNN支持。在安装过程中,可能会遇到问题,如jemalloc的链接错误,解决方法是修改环境变量。接着,安装CTC库warp-ctc,并将MXNet配置为使用该库。最后,清理并重新编译MXNet以应用所有更改。
本文档详细介绍了如何在Ubuntu16.04上安装MXNet库,并确保其支持OpenBLAS、OpenCV、CUDA和cuDNN。首先,通过apt-get安装OpenBLAS和libopencv-dev,然后从GitHub克隆MXNet源码并配置编译选项,特别启用CUDA和cuDNN支持。在安装过程中,可能会遇到问题,如jemalloc的链接错误,解决方法是修改环境变量。接着,安装CTC库warp-ctc,并将MXNet配置为使用该库。最后,清理并重新编译MXNet以应用所有更改。
1、安装OpenBLAS
$sudo apt-get install -y libopenblas-dev
2、安装opencv
$sudo apt-get install -y libopencv-dev
3下载mxnet源码并安装
$git clone --recursize https://github.com/dmlc/mxnet
$cd mxnet
$make -j $(nproc) USE_OPENCV=1 USE_BLAS=openblas USE_CUDA=1 USE_CUDA_PATH=/usr/local/cuda USE_CUDNN=1
或拷贝make下面的config.mk到当前目录下
修改如下内容

然后执行make -j8
4、安装python
$cd python
$sudo python setup.py install
5、测试mxnet python环境是否安装成功
$python
>>>import mxnet
出现问题
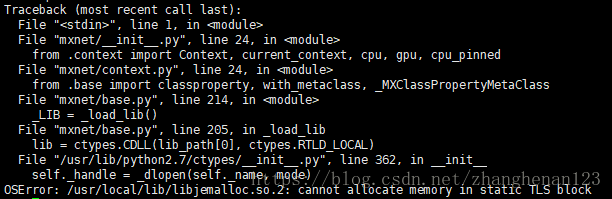
解决方法:
重新安装jemalloc并在~/.bashrc文件末尾加上
export LD_PRELOAD="/usr/local/lib/libjemalloc.so"
6、安装CTC
cd ~/
git clone https://github.com/baidu-research/warp-ctc
cd warp-ctc
mkdir build
cd build
cmake ..
make
sudo make install
7、让mxnet支持ctc
cd mxnet
修改mxnet的config.mk文件,对文件中的如下两行进行修改并使其生效
WARPCTC_PATH = $(HOME)/warp-ctc
MXNET_PLUGINS += plugin/warpctc/warpctc.mk
8、重新编译Mxnet
cd mxnet
make clean
$make -j $(nproc) USE_OPENCV=1 USE_BLAS=openblas USE_CUDA=1 USE_CUDA_PATH=/usr/local/cuda USE_CUDNN=1

















 1047
1047

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









