



支持如下速率:
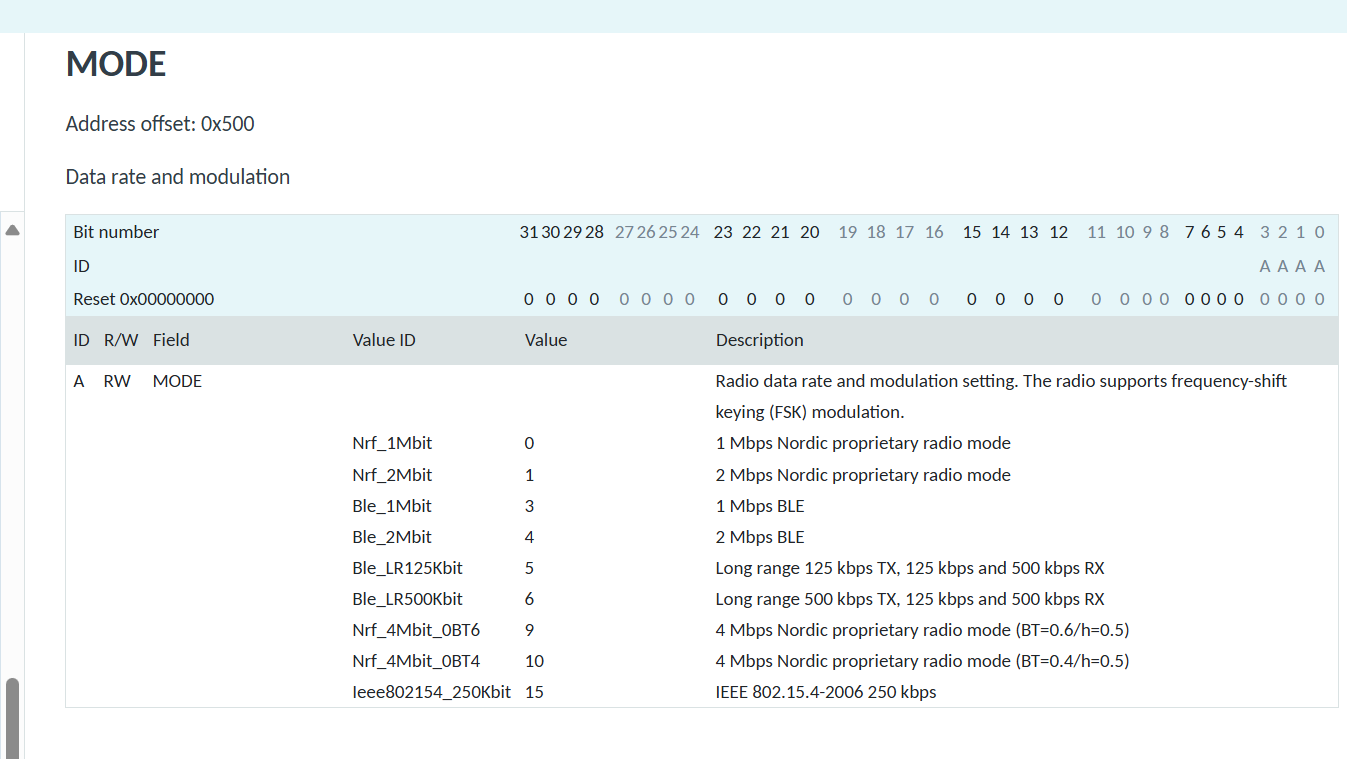
从mode 寄存器上看,最低支持的速率是BLE code 模式,速率是125k;
最高速率是 Mbps Nordic proprietary radio mode (BT=0.6/h=0.5) 速率;
NRF_RADIO->MODE = 9; // Nrf_4Mbit_0BT6
NRF_RADIO->MODE = 10; // Nrf_4Mbit_0BT4
支持如下速率:
从mode 寄存器上看,最低支持的速率是BLE code 模式,速率是125k;
最高速率是 Mbps Nordic proprietary radio mode (BT=0.6/h=0.5) 速率;
NRF_RADIO->MODE = 9; // Nrf_4Mbit_0BT6
NRF_RADIO->MODE = 10; // Nrf_4Mbit_0BT4
 1355
1658
602
1355
1658
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























