






 博客围绕单片机展开,包含硬件设计参考图,还介绍了LED和USART1的配置。其中LED配置给出了代码初始化部分,USART1也展示了代码初始化内容。
博客围绕单片机展开,包含硬件设计参考图,还介绍了LED和USART1的配置。其中LED配置给出了代码初始化部分,USART1也展示了代码初始化内容。
1.硬件设计参考图
参考:00_YS_硬件电路图_往事不可追_来日不方长的博客-优快云博客
2.配置LED
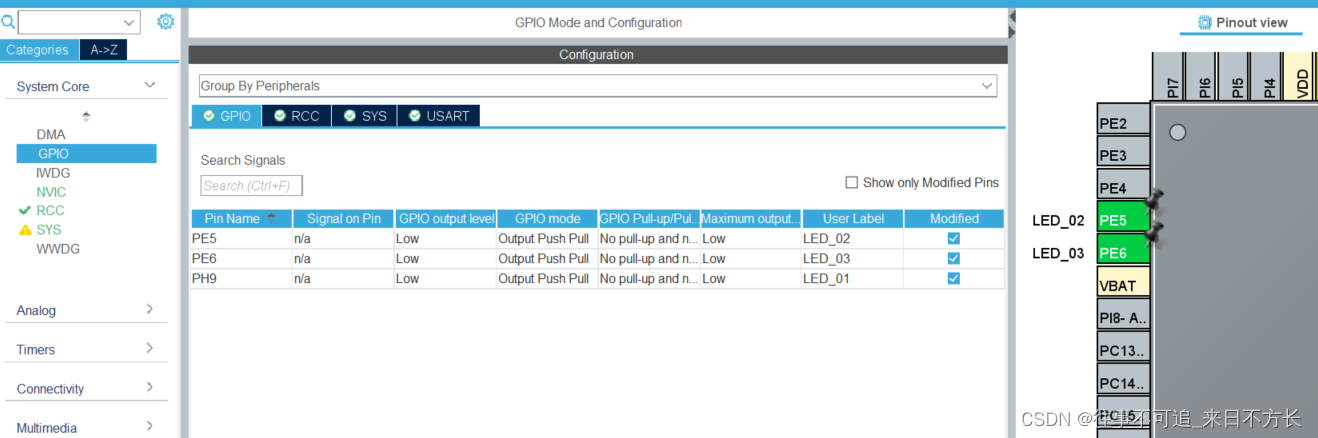
2.1代码部分
代码初始化部分如下图MX自动生成:
// main.h 中
/* Private defines -----------------------------------------------------------*/
#define LED_02_Pin GPIO_PIN_5
#define LED_02_GPIO_Port GPIOE
#define LED_03_Pin GPIO_PIN_6
#define LED_03_GPIO_Port GPIOE
#define LED_01_Pin GPIO_PIN_9
#define LED_01_GPIO_Port GPIOH
/* USER CODE BEGIN Private defines */
#define LED1_TOGGLE HAL_GPIO_TogglePin(LED_01_GPIO_Port, LED_01_Pin)
#define LED2_TOGGLE HAL_GPIO_TogglePin(LED_02_GPIO_Port, LED_02_Pin)
#define LED3_TOGGLE HAL_GPIO_TogglePin(LED_03_GPIO_Port, LED_03_Pin)
/* USER CODE END Private defines *//** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOE, LED_02_Pin|LED_03_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LED_01_GPIO_Port, LED_01_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : PEPin PEPin */
GPIO_InitStruct.Pin = LED_02_Pin|LED_03_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = LED_01_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LED_01_GPIO_Port, &GPIO_InitStruct);
}3.配置USART1
3.1 USART1代码初始化部分
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**USART1 GPIO Configuration
PB6 ------> USART1_TX
PB7 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PB6 ------> USART1_TX
PB7 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_6|GPIO_PIN_7);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}

















 2924
2924

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









