







 超级会员免费看
超级会员免费看
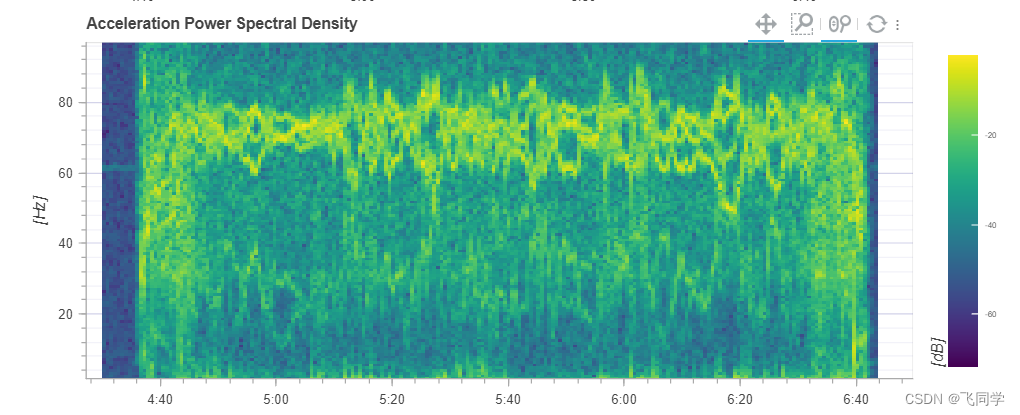
桨叶旋转频率引起的噪声
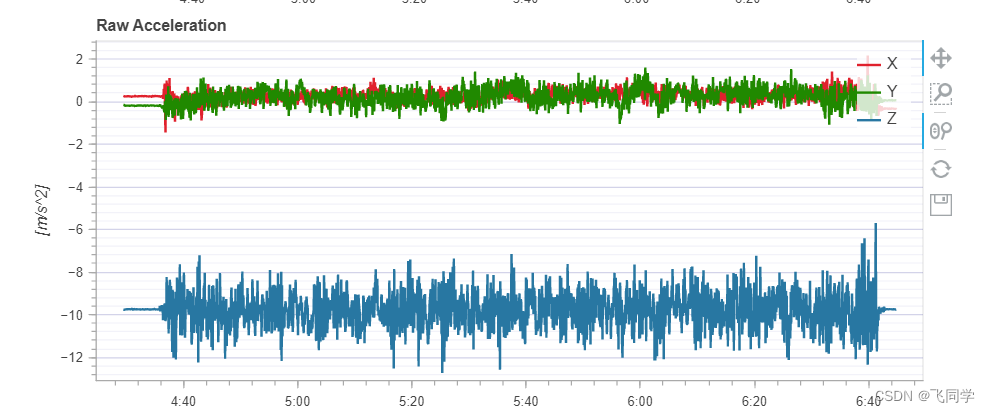
比较好的震动
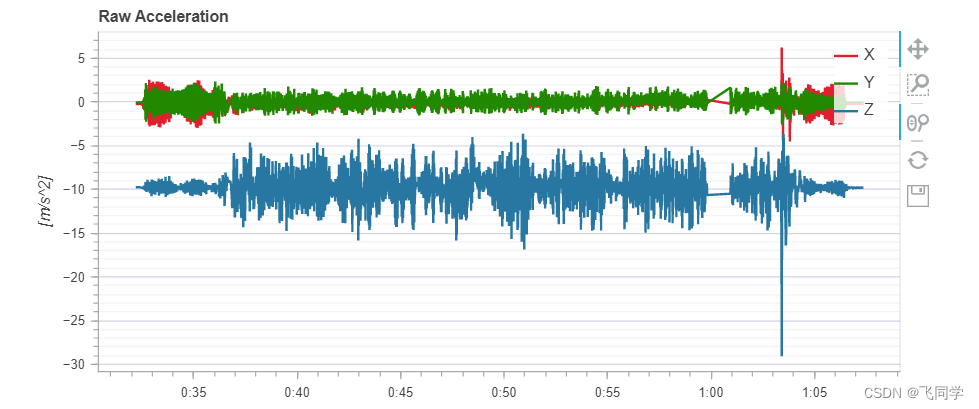
不好的震动
一般好的振动特性时,三轴加速度的原始数据值都会在很小的范围内波动,在±3范围内就是非常好的振动环境了。
分析飞行器的幅频特性,一方面除了查看飞行器的振动特性好坏,另一方面也是为了对飞控中的滤波参数进行调试。飞控中跟振动有关的参数有两个:一个是IMU_GYRO_CUTOFF,这个参数是用于陀螺仪原始数据输出滤波的,滤波器是一个巴特沃斯二阶低通滤波,这个参数要设置成小于振动主频率,但最好不小于40
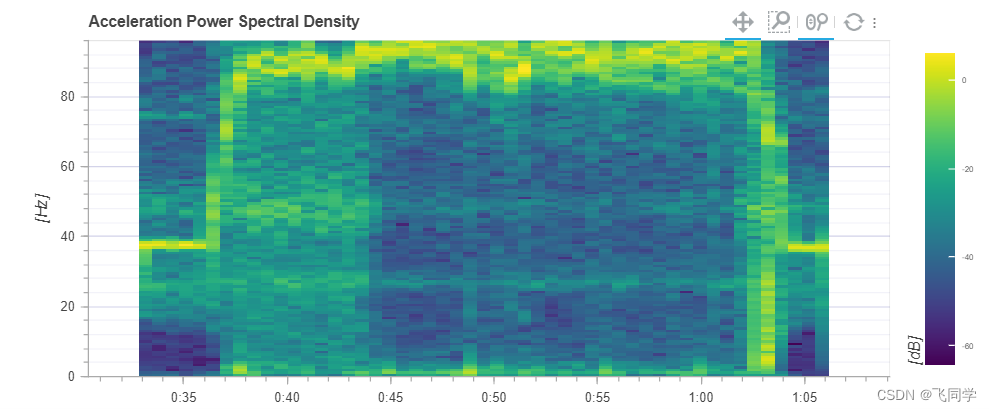
桨叶旋转频率引起的噪声
比较好的震动
不好的震动
一般好的振动特性时,三轴加速度的原始数据值都会在很小的范围内波动,在±3范围内就是非常好的振动环境了。
分析飞行器的幅频特性,一方面除了查看飞行器的振动特性好坏,另一方面也是为了对飞控中的滤波参数进行调试。飞控中跟振动有关的参数有两个:一个是IMU_GYRO_CUTOFF,这个参数是用于陀螺仪原始数据输出滤波的,滤波器是一个巴特沃斯二阶低通滤波,这个参数要设置成小于振动主频率,但最好不小于40
 1292
1292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























