




Alex提出的alexnet网络结构模型,在imagenet2012图像分类challenge上赢得了冠军。作者训练alexnet网络时大致将120万张图像的训练集循环了90次,在两个NVIDIA GTX 580 3GB GPU上花了五到六天。
来源论文:Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton. “Imagenet classification with deep convolutional neural networks.” Advances in neural information processing systems. 2012.”
一 AlexNet创新点:
1 使用Relu替换之前的sigmoid的作为激活函数
2 使用了数据增强策略(Data Augmentation),抑制过拟合
3 使用了重叠的最大池化(Max Pooling)。此前的CNN通常使用平均池化,而AlexNet全部使用最大池化,成功避免了平均池化带来的模糊化效果
4 提出LRN(局部响应归一化)
5 成功使用Dropout机制,抑制过拟合
6 多GPU训练
详细介绍如下:
1 ReLu作为激活函数
在最初的感知机模型中,输入和输出的关系如下:
只是单纯的线性关系,这样的网络结构有很大的局限性:即使用很多这样结构的网络层叠加,其输出和输入仍然是线性关系,无法处理有非线性关系的输入输出。因此,对每个神经元的输出做个非线性的转换也就是,将上面就加权求和的结果输入到一个非线性函数,也就是激活函数中。 这样,由于激活函数的引入,多个网络层的叠加就不再是单纯的线性变换,而是具有更强的表现能力。在最初,sigmoid和tanh函数最常用的激活函数。

**sigmoid:**在网络层数较少时,sigmoid函数的特性能够很好的满足激活函数的作用。它把一个实数压缩至0到1之间,当输入的数字非常大的时候,结果会接近1;当输入非常大的负数时,则会得到接近0的结果。这种特性,能够很好的模拟神经元在受刺激后,是否被激活向后传递信息(输出为0,几乎不被激活;输出为1,完全被激活)。
sigmoid一个很大的问题就是梯度饱和。 观察sigmoid函数的曲线,当输入的数字较大(或较小)时,其函数值趋于不变,其导数变的非常的小。这样,在层数很多的的网络结构中,进行反向传播时,由于很多个很小的sigmoid导数累成,导致其结果趋于0,权值更新较慢。

**ReLu:**针对sigmoid梯度饱和导致训练收敛慢的问题,在AlexNet中引入了ReLU。ReLU是一个分段线性函数,小于等于0则输出为0;大于0的则恒等输出。相比于sigmoid,ReLU有以下特点:
(1)计算开销小。sigmoid的正向传播有指数运算,倒数运算,而ReLu是线性输出;反向传播中,sigmoid有指数运算,而ReLU有输出的部分,导数始终为1。
(2)梯度饱和问题
(3)稀疏性。Relu会使一部分神经元的输出为0,这样就造成了网络的稀疏性,并且减少了参数的相互依存关系,缓解了过拟合问题的发生。

这里有个问题,前面提到,激活函数要用非线性的,是为了使网络结构有更强的表达的能力。那这里使用ReLU本质上却是个线性的分段函数,是怎么进行非线性变换的。
这里把神经网络看着一个巨大的变换矩阵M,其输入为所有训练样本组成的矩阵A,输出为矩阵B。这里的M是一个线性变换的话,则所有的训练样本A进行了线性变换输出为B。

那么对于ReLU来说,由于其是分段的,0的部分可以看做神经元没有激活,不同的神经元激活或者不激活,其神经元组成的变换矩阵是不一样的。
设有两个训练样本 a1,a2,其训练时神经网络组成的变换矩阵为M1,M2。 由于M1变换对应的神经网络中激活神经元和M2是不一样的,这样M1,M2实际上是两个不同的线性变换。也就是说,每个训练样本使用的线性变换矩阵Mi是不一样的,在整个训练样本空间来说,其经历的是非线性变换。
简单来说,不同训练样本中的同样的特征,在经过神经网络学习时,流经的神经元是不一样的(激活函数值为0的神经元不会被激活)。这样,最终的输出实际上是输入样本的非线性变换。单个训练样本是线性变换,但是每个训练样本的线性变换是不一样的,这样整个训练样本集来说,就是非线性的变换。
传统神经网络激活函数通常为反正切或是sigmoid,AlexNet使用RELU作为激活函数,相比于反正切,该方法训练速度大约有6倍提升。RELU激活函数简单到难以置信。
2 数据增强
神经网络由于训练的参数多,需要比较多的数据量,不然很容易过拟合。当训练数据有限时,可以通过一些变换从已有的训练数据集中生成一些新的数据,以快速地扩充训练数据。对于图像数据集来说,可以对图像进行一些形变操作:
(1)翻转
(2)随机裁剪
(3)平移,颜色光照的变换
AlexNet中对数据做了以下操作:
(1)随机裁剪,对256×256的图片进行随机裁剪到227×227,然后进行水平翻转。
(2)测试的时候,对左上、右上、左下、右下、中间分别做了5次裁剪,然后翻转,共10个裁剪,之后对结果求平均。
(3)对RGB通道使用了PCA(主成分分析),对每个训练图片的每个像素,提取出RGB三个通道的特征向量与特征值,对每个特征值乘以一个α,α是一个均值0.1方差服从高斯分布的随机变量。也就是对颜色、光照作变换,结果使错误率又下降了1%。
3 层叠池化
在LeNet中池化是不重叠的,即池化的窗口的大小和步长是相等的,如下:

在AlexNet中使用的池化(Pooling)却是可重叠的,也就是说,在池化的时候,每次移动的步长小于池化的窗口长度。AlexNet池化的大小为3×3的正方形,每次池化移动步长为2,这样就会出现重叠。重叠池化可以避免过拟合,这个策略贡献了0.3%的Top-5错误率。与非重叠方案s=2,z=2s=2,z=2相比,输出的维度是相等的,并且能在一定程度上抑制过拟合。
4 局部响应归一化
ReLU具有让人满意的特性,它不需要通过输入归一化来防止饱和。如果至少一些训练样本对ReLU产生了正输入,那么那个神经元上将发生学习。然而,我们仍然发现接下来的局部响应归一化有助于泛化。a(x,y)(i)表示神经元激活,通过在(x,y)位置应用核i,然后应用ReLU非线性来计算,响应归一化激活b(x,y)(i)通过下式给定:
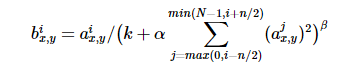
其中,N是卷积核的个数,也就是生成的FeatureMap的个数;k,α,β,n是超参数,论文中使用的值是k=2,n=5,α=10(-4),β=0.75。
输出b(x,y)(i)和输入a(x,y)(j)的上标表示的是当前值所在的通道,也即是叠加的方向是沿着通道进行。将要归一化的值a(x,y)(i)所在附近通道相同位置的值的平方累加起来

Hinton等人认为LRN层模仿生物神经系统的侧抑制机制,对局部神经元的活动创建竞争机制,使得响应比较大的值相对更大,提高模型泛化能力。但是,后来的论文比如Very Deep Convolution Networks for Large-Scale Image Recognition(也就是提出VGG网络的文章)中证明,LRN对CNN并没有什么作用,反而增加了计算复杂度,因此,这一技术也不再使用了。
5 Dropout
这个是比较常用的抑制过拟合的方法了。
引入Dropout主要是为了防止过拟合。在神经网络中Dropout通过修改神经网络本身结构来实现,对于某一层的神经元,通过定义的概率将神经元置为0,这个神经元就不参与前向和后向传播,就如同在网络中被删除了一样,同时保持输入层与输出层神经元的个数不变,然后按照神经网络的学习方法进行参数更新。在下一次迭代中,又重新随机删除一些神经元(置为0),直至训练结束。
Dropout应该算是AlexNet中一个很大的创新,现在神经网络中的必备结构之一。Dropout也可以看成是一种模型组合,每次生成的网络结构都不一样,通过组合多个模型的方式能够有效地减少过拟合,Dropout只需要两倍的训练时间即可实现模型组合(类似取平均)的效果,非常高效。
如下图:

在AlexNet中,在训练时,每层的keep_prob被设置为0.5,而在测试时,所有的keep_prob都为1.0,也即关闭dropout,并把所有神经元的输出均乘以0.5,保证训练时和测试时输出的均值接近。当然,dropout只用于全连接层。没有dropout,AlexNet网络将会遭遇严重的过拟合,加入dropout后,网络的收敛速度慢了接近一倍。
二 AlexNet网络结构
AlexNet和LeNet -5-网络有些许不同,在LeNet-5网络里,卷积层和池化层是分开的,即一层卷积层一层池化这样分布的,但是AlexNet网络卷积和池化层合为一体了,而且还是分两路设计网络。

(一)总体概述下:
(1)AlexNet为8层结构,其中前5层为卷积层,后面3层为全连接层;学习参数有6千万个,神经元有650,000个。
(2)AlexNet在两个GPU上运行。
(3)AlexNet在第2,4,5层均是前一层自己GPU内连接,第3层是与前面两层全连接,全连接是2个GPU全连接。
(4)LRN层第1,2个卷积层后。
(5)Max pooling层在LRN层以及第5个卷积层后。
(6)ReLU在每个卷积层以及全连接层后。
(7)Dropout层减少过度拟合,应用在前两个全连接层。
(二)详解各层训练参数的计算:
前五层:卷积层

后三层:全连接层

整体计算图:

(三)详解AlexNet网络的各层:
卷积层C1
该层的处理流程是: 卷积–>ReLU–>池化–>归一化。
(1)卷积,输入是227×227*3,使用96个11×11×3(卷积核最后一个的维数一定与输入最后一个的维数相同)的卷积核,得到的FeatureMap为55×55×96。
(2)ReLU,将卷积层输出的FeatureMap输入到ReLU函数中。
(3)池化,使用3×3步长为2的池化单元(重叠池化,步长小于池化单元的宽度),输出为27×27×96((55−3)/2+1=27。
(4)局部响应归一化,使用k=2,n=5,α=10(−4),β=0.75进行局部归一化,输出的仍然为27×27×96,输出分为两组,每组的大小为27×27×48。
卷积层C2
该层的处理流程是:卷积–>ReLU–>池化–>归一化
(1)卷积,输入是2组27×27×48。使用2组,每组128个尺寸为5×5×48的卷积核,并作了边缘填充padding=2,卷积的步长为1. 则输出的FeatureMap为2组,每组的大小为27×27 times128。((27+2∗2−5)/1+1=27
(2)ReLU,将卷积层输出的FeatureMap输入到ReLU函数中。
(3)池化运算的尺寸为3×3,步长为2,池化后图像的尺寸为(27−3)/2+1=13,输出为13×13×256。
(4)局部响应归一化,使用k=2,n=5,α=10(−4),β=0.75进行局部归一化,输出的仍然为13×13×256,输出分为2组,每组的大小为13×13×128。
卷积层C3
该层的处理流程是: 卷积–>ReLU
(1)卷积,输入是13×13×256,使用2组共384尺寸为3×3×256的卷积核,做了边缘填充padding=1,卷积的步长为1。则输出的FeatureMap为13×13×384。
(2)ReLU,将卷积层输出的FeatureMap输入到ReLU函数中。
卷积层C4
该层的处理流程是: 卷积–>ReLU
该层和C3类似。
(1)卷积,输入是13×13×384,分为两组,每组为13×13×192。使用2组,每组192个尺寸为3×3×192的卷积核,做了边缘填充padding=1,卷积的步长为1。则输出的FeatureMap为13×13 times384,分为两组,每组为13×13×192。
(2)ReLU,将卷积层输出的FeatureMap输入到ReLU函数中。
卷积层C5
该层处理流程为:卷积–>ReLU–>池化
(1)卷积,输入为13×13×384,分为两组,每组为13×13×192。使用2组,每组为128尺寸为3×3×192的卷积核,做了边缘填充padding=1,卷积的步长为1。则输出的FeatureMap为13×13×256。
(2)ReLU,将卷积层输出的FeatureMap输入到ReLU函数中。
(3)池化,池化运算的尺寸为3×3,步长为2,池化后图像的尺寸为 (13−3)/2+1=6,即池化后的输出为6×6×256。
全连接层FC6
该层的流程为:(卷积)全连接 -->ReLU -->Dropout
(1)卷积->全连接: 输入为6×6×256,该层有4096个卷积核,每个卷积核的大小为6×6×256。由于卷积核的尺寸刚好与待处理特征图(输入)的尺寸相同,即卷积核中的每个系数只与特征图(输入)尺寸的一个像素值相乘,一一对应,因此,该层被称为全连接层。由于卷积核与特征图的尺寸相同,卷积运算后只有一个值,因此,卷积后的像素层尺寸为4096×1×1,即有4096个神经元。
(2)ReLU,这4096个运算结果通过ReLU激活函数生成4096个值。
(3)Dropout,抑制过拟合,随机的断开某些神经元的连接或者是不激活某些神经元。
全连接层FC7
流程为:全连接–>ReLU–>Dropout
(1)全连接,输入为4096的向量。
(2)ReLU,这4096个运算结果通过ReLU激活函数生成4096个值。
(3)Dropout,抑制过拟合,随机的断开某些神经元的连接或者是不激活某些神经元。
输出层
第七层输出的4096个数据与第八层的1000个神经元进行全连接,经过训练后输出1000个float型的值,这就是预测结果。
AlexNet参数数量
卷积层的参数 = 卷积核的数量 * 卷积核 + 偏置
C1: 96个11×11×3的卷积核,96×11×11×3+96=34848
C2: 2组,每组128个5×5×48的卷积核,(128×5×5×48+128)×2=307456
C3: 384个3×3×256的卷积核,3×3×256×384+384=885120
C4: 2组,每组192个3×3×192的卷积核,(3×3×192×192+192)×2=663936
C5: 2组,每组128个3×3×192的卷积核,(3×3×192×128+128)×2=442624
FC6: 4096个6×6×256的卷积核,6×6×256×4096+4096=37752832
FC7: 4096∗4096+4096=16781312
output: 4096∗1000=4096000
卷积层 C2,C4,C5中的卷积核只和位于同一GPU的上一层的FeatureMap相连。从上面可以看出,参数大多数集中在全连接层,在卷积层由于权值共享,权值参数较少。
(四)Details of Learning 学习中的细节
(1)输入是224×224224×224,不过经过计算(224−11)/4=54.75并不是论文中的55×55,而使用227×227作为输入,则(227−11)/4=55。
(2)输入的图片的像素是224x224的且有三层,这三层代表三原色RGB(我们知道所谓的彩色其实就是三原色组合而成的,因此彩色图片也是这样),我们可以简单的看做有三张图片堆叠而成的彩色图片,这三张图片分别对应红色,绿色,蓝色,在LeNet -5-网络只有一层,因为颜色是灰度的。输入层的采样窗口为11×11且也有三层对应图片的三层,那么每采样一次有多少个连接呢?有11x11x3 = 363个,采样窗口的平移步长是4,(在LeNet -5-网络移动步长是1,这里是4,应该很容易理解)为什么步长是4而不是1呢?因为考虑到计算量的问题,如果是1步计算量太大。那么这样的采样窗口在图像上采样后的维度是多少呢?
(3)AlexNet使用了mini-batch SGD,batch的大小为128,梯度下降的算法选择了momentum,参数为0.9,加入了L2正则化,或者说权重衰减,参数为0.0005。论文中提到,这么小的权重衰减参数几乎可以说没有正则化效果,但对模型的学习非常重要。
(4)每一层权重均初始化为0均值0.01标准差的高斯分布,在第二层、第四层和第五层卷积的偏置被设置为1.0,而其他层的则为0,目的是为了加速早期学习的速率(因为激活函数是ReLU,1.0的偏置可以让大部分输出为正)。
(5)对于所有层都使用了相等的学习率,这是在整个训练过程中手动调整的。学习速率初始值为0.01,在训练结束前共减小3次,每次减小都出现在错误率停止减少的时候,每次减小都是把学习速率除以10 。
(6)深度很重要,去掉任一层,性能都会降低。
(7)为了简化实验,没有使用非监督预训练。但是当有足够计算能力扩大网络结构,而没增加相应数据时,非监督预训练可能会有所帮助。
三 代码实现(Pytorch)
主要参考 https://www.bilibili.com/video/BV1W7411T7qc
这部分搭建AlexNet网络并训练花分类数据集。
1 数据集下载。
http://download.tensorflow.org/example_images/flower_photos.tgz
包含 5 中类型的花,每种类型有600~900张图像不等。将flower_photos拷贝到flower_data文件夹下,并解压缩。
2 对数据集进行划分,划分为训练集与验证集。
由于此数据集不像 CIFAR10 那样下载时就划分好了训练集和测试集,因此需要自己划分。split_data.py会按照9:1的比例将数据集分为训练集和验证集。
在split_data.py的当前页面,shift + 右键 打开 PowerShell 窗口,输入 python split_data.py,就会自动进行转换了。

划分以后的数据集目录如下:

|-- flower_data
|-- flower_photos
|-- daisy
|-- dandelion
|-- roses
|-- sunflowers
|-- tulips
|-- LICENSE.txt
|-- train
|-- daisy
|-- dandelion
|-- roses
|-- sunflowers
|-- tulips
|-- val
|-- daisy
|-- dandelion
|-- roses
|-- sunflowers
|-- tulips
|-- flower_photos.tgz
|-- flower_link.txt
|-- README.md
|-- split_data.py
3 注释model.py。
import torch.nn as nn
import torch
class AlexNet(nn.Module):
def __init__(self, num_classes=1000, init_weights=False):
super(AlexNet, self).__init__()
#与LeNet不一样的地方
#用nn.Sequential模块,可以将一系列的层结构进行打包,组合成一个新的结构,在这里取名叫features
self.features = nn.Sequential(
#padding可以传入整形或者tuple(1,2)。如果传入整形1,那就会在特征矩阵的上下各补一行零,左右两侧各补一列零。
# tuple(1,2)表示上下各补一行零,左右两侧各补两列零
#如果想更精确,就要用官网的nn.ZeroPad2d((1,2,1,2)),左侧补一列,右侧补两列,上方补一行,下方补两行
nn.Conv2d(3, 48, kernel_size=11, stride=4, padding=2), # input[3, 224, 224] output[48, 55, 55]
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2), # output[48, 27, 27]
nn.Conv2d(48, 128, kernel_size=5, padding=2), # output[128, 27, 27]
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2), # output[128, 13, 13]
nn.Conv2d(128, 192, kernel_size=3, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 12万+
12万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









