




首先利用DH法对主臂建模
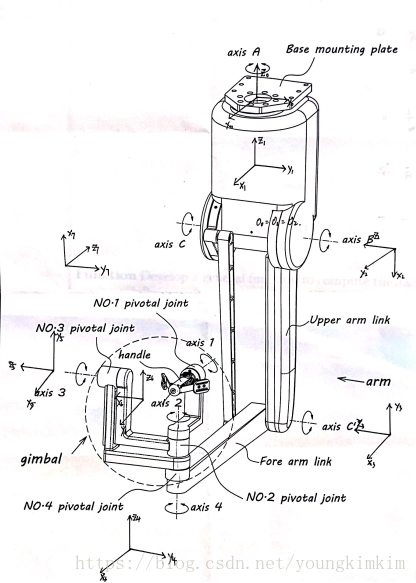
代码如下:
function m = MH_DH_Model()
m.l_arm = 0.3000;
m.l_forearm = 0.3500;
m.h = 0.1347;
m.method = 'Standard';
m.DH = [
% type alpha a d theta
%=====================================
1 pi/2 0 0 0;
1 0 m.l_arm 0 -pi/2;
1 -pi/2 m.l_forearm 0 pi/2;
1 pi/2 0 m.h 0;
1 -pi/2 0 0 0;
1 pi/2 0 0 -pi/2;
1 0 0 0 pi/2;
];
m.tip = eye(4);
end完成建模后做Forward Kinematics(可以自己写function,也可以直接用robotics toolbox)
代码如下:
function [T,Jacobian] = FK_Jacob_Geometry(q,dh_table,Tip_T,DH_method)
% return position of center of mass of ith link
T = eye(4);
dh_size = size(dh_table);
Jacob_ori = [0;0;1];
z_axis = [0;0;1];
p_pos = [0;0;0];
for i=1:dh_size(1)
theta = dh_table(i,5);
d = dh_table(i,4);
a = dh_table(i,3);
alpha = dh_table(i,2);
type = dh_table(i,1);
if type == 1
theta = theta + q(i);
T = T*DHtransform(theta,d,a,alpha,DH_method);
z_axis = [z_axis,T(1:3,3)];
p_pos = [p_pos,T(1:3,4)];
elseif type ==2
d = d + q(i);
T= T*DHtransform(theta,d,a,alpha,DH_method);
z_axis = [z_axis,T(1:3,3)];
p_pos = [p_pos,T(1:3,4)];
else
msg = sprintf('Encounter a known Joint Type %d, it must be 1 or 2',type);
error(msg);
end
end
Jacobian = [];
if DH_method == 'Standard'
z_axis = z_axis(:,1:end-1);
p_pos = p_pos(:,1:end-1);
elseif DH_method == 'Modified'
z_axis = z_axis(:,2:end);
p_pos = p_pos(:,2:end);
end
%Tranform from last joint frame to tip frame
T = T*Tip_T;
p_pos = [p_pos,T(1:3,4)];
for i=1:dh_size(1)
type = dh_table(i,1);
if type == 1
Jacobian = [Jacobian,[cross(z_axis(:,i),p_pos(:,end)-p_pos(:,i));z_axis(:,i)]];
elseif type == 2
Jacobian = [Jacobian,[z_axis(:,i);zeros(3,1)]];
end
end
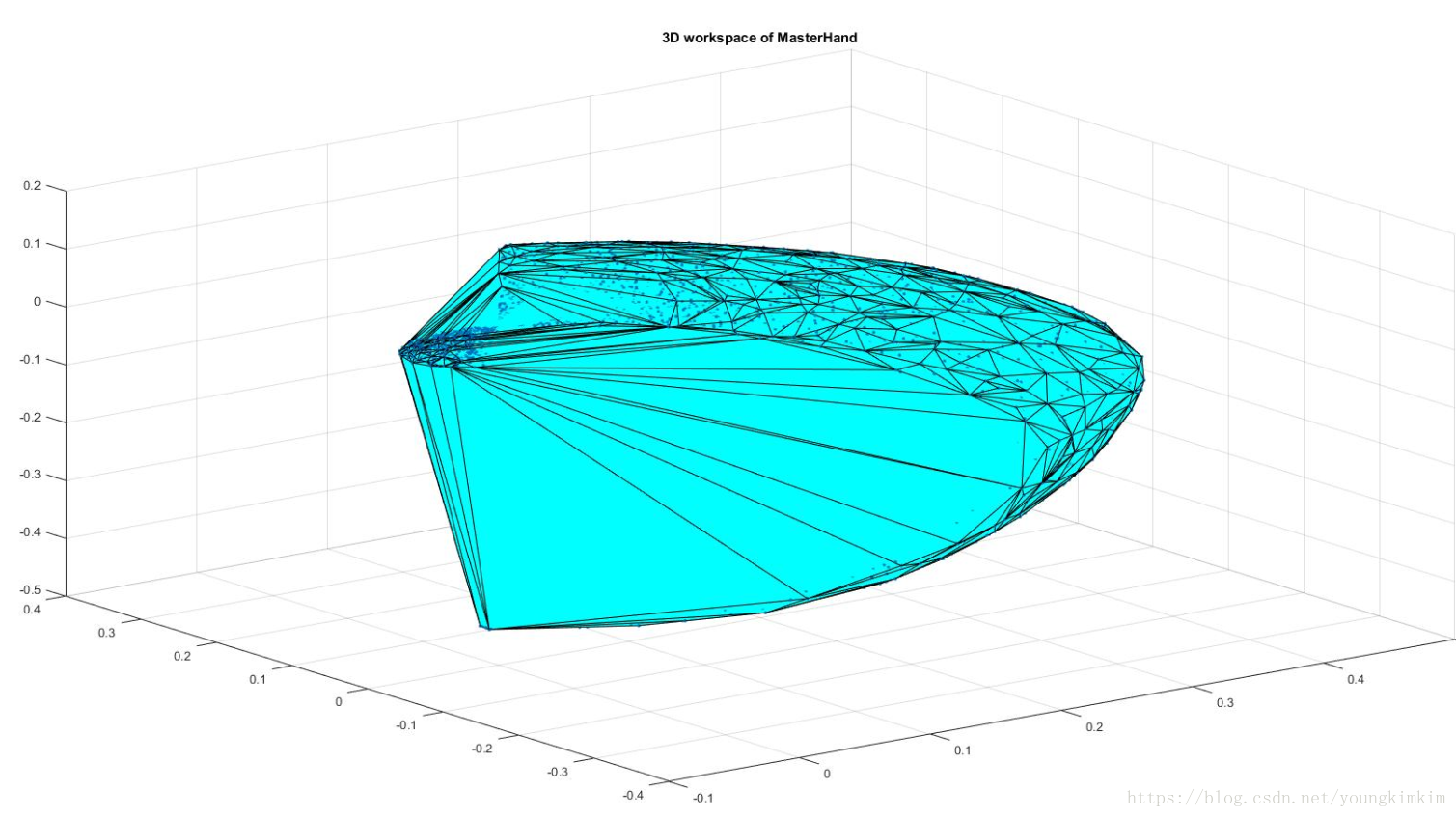
end现在可以分析end effector 的 workspace, 随机在joint angle constraints里任意生成n个点,利用forward kinematics计算出n个三维空间上的点,再求解其包络图就可以了。
代码如下:
l_arm = 0.3000; % length of arm
l_fore_arm = 0.3500; % length of forearm
h = 0.1347; % height of handle
% all possible theta values for seven joints
% the joints constrains refer to Da Vinci Robot
% theta1 = (-pi/3):0.1:(pi/3);
% theta2 = (-pi/3):0.1:(5*pi/36);
% theta3 = (-pi/18):0.1:(5*pi/12);
% theta4 = (-49*pi/36):0.1:(13*pi/36);
% theta5 = (-93*pi/90):0.1:(49*pi/90);
% theta6 = (-41*pi/180):0.1:(41*pi/180);
% theta7 = (-25*pi/18):0.1:(25*pi/18);
% generate n theta values
n = 100000;
theta1 = rand(n,1)*(2*pi/3)-pi/3;
theta2 = rand(n,1)*(17*pi/36)-pi/3;
theta3 = rand(n,1)*(17*pi/36)-pi/18;
theta4 = rand(n,1)*(31*pi/18)-49*pi/36;
theta5 = rand(n,1)*(71*pi/45)-93*pi/90;
theta6 = rand(n,1)*(41*pi/90)-41*pi/180;
theta7 = rand(n,1)*(25*pi/9)-25*pi/18;
% the last 4 joints will not affect the tip position
% Forward kinematics to generate n 3D points
x = cos(theta1).*(l_fore_arm.*cos(theta2 + theta3) - h.*sin(theta2 + theta3) + l_arm.*sin(theta2));
y = sin(theta1).*(l_fore_arm.*cos(theta2 + theta3) - h.*sin(theta2 + theta3) + l_arm.*sin(theta2));
z = h.*cos(theta2 + theta3) + l_fore_arm.*sin(theta2 + theta3) - l_arm.*cos(theta2);
% plot the points cloud
scatter3(x, y, z, '.')
hold on
% plot the convex
dt = delaunayTriangulation(x, y, z);
[ch, v] = convexHull(dt);
trisurf(ch, dt.Points(:,1), dt.Points(:,2), dt.Points(:,3), 'FaceColor', 'cyan')
title('3D workspace of MasterHand')结果如图所示:

















 5825
5825

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









