




 本文介绍如何使用roboticstoolbox和Simulink创建一个7关节机械臂的模型,并通过比较重力扭矩与实际扭矩来验证其正确性。首先定义了各关节参数,然后在Simulink中实现位置控制器。
本文介绍如何使用roboticstoolbox和Simulink创建一个7关节机械臂的模型,并通过比较重力扭矩与实际扭矩来验证其正确性。首先定义了各关节参数,然后在Simulink中实现位置控制器。
工具:robotics toolbox -- peter corke / Simulink
思路:1. 创建一个 position controller, 让 end effector 去到指定点,测出在该点时对应的 joint angles, torque;
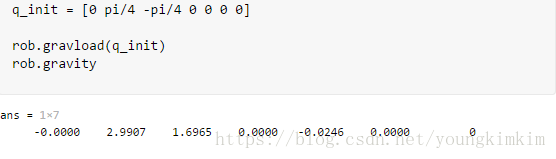
2. 使用 toolbox 里的 gravload(q) 求出对应该点的 gravity torque;
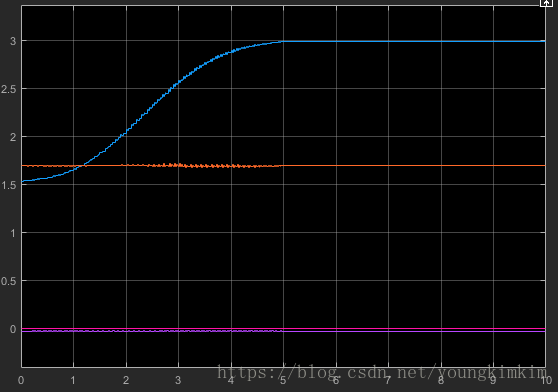
3. 比较两个 torque 是否一致。
- Create robot using SerialLink and set dynamics parameters
startup_rvc
%% theta d a alpha
L(1) = Link([ 0 0 0 pi/2]);
L(1).m = 0.00;
L(1).r = [0 0 0];
L(1).I = [0.1, 0.1, 0.1, 0, 0, 0];
L(1).G = 1;
L(1).Jm = 0.0;
L(2) = Link([ 0 0 0.30 0]);
L(2).m = 0.9507;
L(2).r = [-0.32213 -0.01724 -0.05311 ];
L(2).I = [0.1, 0.1, 0.1, 0, 0, 0];
L(2).G = 1;
L(2).Jm = 0.0;
L(3) = Link([ 0 0 0.35 -pi/2]);
L(3).m = 0.4138;
L(3).r = [-0.2076 0.0000 0.0000];
L(3).I = [0.1, 0.1, 0.1, 0, 0, 0];
L(3).G = 1;
L(3).Jm = 0.0;
L(4) = Link([ 0 0.1347 0 pi/2]);
L(4).m = 0.1540;
L(4).r = [ 0 -0.08887 0.06342 ];
L(4).I = [0.1, 0.1, 0.1, 0, 0, 0];
L(4).G = 1;
L(4).Jm = 0.0;
L(5) = Link([ 0 0 0 -pi/2]);
L(5).m = 0.1051;
L(5).r = [0.0000 -0.05926 -0.05544 ];
L(5).I = [0.1, 0.1, 0.1, 0, 0, 0];
L(5).G = 1;
L(5).Jm = 0.0;
L(6) = Link([ 0 0 0 pi/2]);
L(6).m = 0.0738;
L(6).r = [0.0000 -0.02402 0.03396];
L(6).I = [0.1, 0.1, 0.1, 0, 0, 0];
L(6).G = 1;
L(6).Jm = 0.0;
L(7) = Link([ 0 0 0 0]);
L(7).m = 0.00;
L(7).r = [0 0 0];
L(7).I = [0.1, 0.1, 0.1, 0, 0, 0];
L(7).G = 1;
L(7).Jm = 0.0;
syms q1 q2 q3 q4 q5 q6 q7;
rob = SerialLink(L,'name','MasterHand');
rob.offset = [0 -pi/2 pi/2 0 0 -pi/2 pi/2];
rob.qlim = [-1/3*pi 1/3*pi;
-1/3*pi 25/180*pi;
-1/18*pi 75/180*pi;
-245/180*pi 65/180*pi;
-186/180*pi 98/180*pi;
-41/180*pi 41/180*pi;
-250/180*pi 250/180*pi];
% rob.plot([0 0 0 0 0 0 0],'jointdiam',1,'base','wrist','arrow','workspace',[-1 1 -1 1 -1 1]);
% rob.gravity = [0 0 9.81];
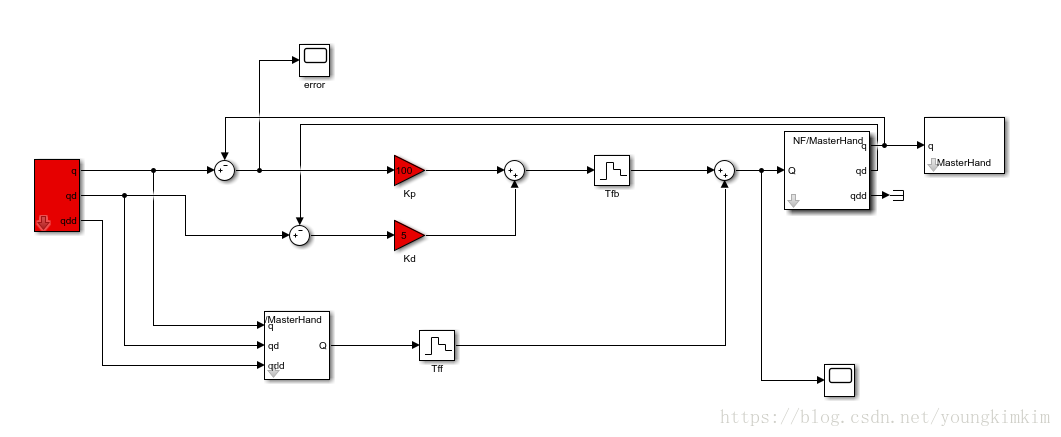
- Create Position Controller in Simulink
- Compare Result

















 5240
5240

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









