







[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3aNKIR4E-1685371700448)(data:image/svg+xml;utf8, )]
2.4.3 基于Robotics Toolbox的工具箱的模型检测
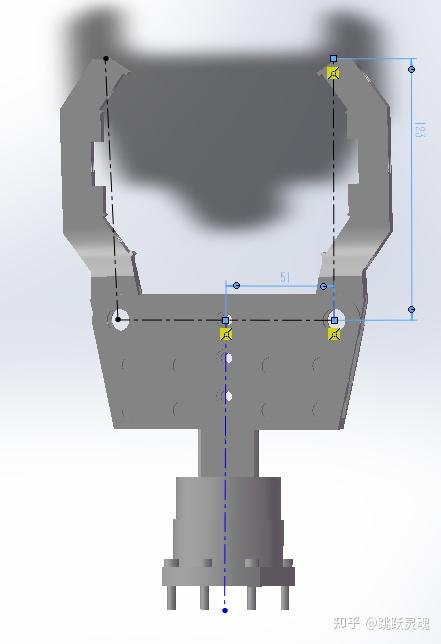
上文中,我们已经对采摘机器手爪运动学理论模型进行了创建,接下来要用MATLAB软件中的机器人工具箱对创建好的采摘机器手爪运动学理论模型进行校验。
2.4.4 对象模型创建
运用MATLAB软件的Link函数将上文采摘机器手爪已确立的主要参数代入完成整个模型建模。Link函数格式如下:
L=Link([theta,d,a,alpha]) (2.8)
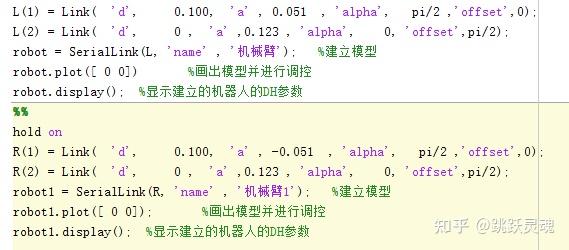
该式中,theata为关节角;d为连杆偏距;a为连杆长度;alpha为连杆转角。通过表2.7的D-H参数,在MATLAB中编写的程序如下图2.8所示:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-R8hxvk6W-1685371700448)(data:image/svg+xml;utf8, )]
图2.8 Link函数程序
采摘机器手爪的运动学仿
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











